
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Схемы включения вращающихся трансформаторов
Схемы включения сельсинов
где y - константа. Таким образом, информацией об угловом положении является сдвиг фазы j между питающим и выходным напряжениям. Достоинством режима фазовращателя является линейность сдвига фазы j от угла a и удобство преобразования данного сдвига в цифровой код положения. В трансформаторном режиме однофазная обмотка питается переменным напряжением
При этом создается пульсирующий магнитный поток возбуждения, направленный по оси однофазной обмотки. Этот поток наводит в фазах трехфазной обмотки ЭДС е1, е2, е3, величина которых зависит от угла a,
где n=1, 2, 3; k1 – коэффициент трансформации; a - угловое положение между осью однофазной обмотки и осью первой фазы трехфазной обмотки. В трансформаторном режиме информацией об угловом положении является величина напряжений трехфазной обмотки. На основе сельсинов также строятся системы дистанционной передачи угла (СДПУ) или, иначе говоря, системы синхронной связи (ССС). В СДПУ обеспечивается синхронный поворот механически не связанных осей. Можно выделить две основных разновидности СДПУ на основе сельсинов – индикаторную и трансформаторную системы синхронной связи. Схема индикаторной ССС приведена на рис.1.2.
 , описываемым (1.3). , описываемым (1.3).
Рис.1.2. Схема индикаторной ССС Исходя из (1.4), в трехфазных обмотках СД и СП наводятся ЭДС, величина которых зависит от угловых положений
Если a=0, фазные ЭДС трехфазных обмоток СД и СП равны и токи в данных обмотках не протекают. Если a¹ 0, фазные ЭДС не равны, в трехфазных обмотках протекают токи, взаимодействие которых с потоками возбуждения СД и СП создает синхронизирующие моменты
где Индикаторная ССС характеризуется удельным синхронизирующим моментом
 лежит в пределах (1÷ 50)·10-4НМ/град. лежит в пределах (1÷ 50)·10-4НМ/град.
Индикаторная ССС используется в случаях, когда для поворота СП не требуется значительных усилий. При повороте ротора СД на тот же угол поворачивается ротор СП. Примером использования индикаторной ССС являются манипуляторы, осуществляющие перегрузку ядерного топлива на АЭС. С координатами манипулятора связаны сельсины-датчики, а на пульте оператора размещены сельсины-приемники с лимбами на валах. По положению роторов СП оператор судит о положении координат манипулятора. Основным показателем точности индикаторной ССС является погрешность следования – отклонение угла поворота ротора СП от угла поворота ротора СД. В зависимости от класса точности сельсинов диапазон данной погрешности от 30' до 1, 5°. Схема фрагмента трансформаторной ССС приведена на рис.1.3.
Рис.1.3. Фрагмент трансформаторной ССС
 . .
Для еу можно записать
Трансформаторная ССС используется в случаях, когда для поворота механизма, с которым связан СП, требуются значительные усилия. В таких системах выходное напряжение однофазной обмотки СП uу используется в качестве сигнала задания скорости электропривода объекта управления. При наличии uу электродвигатель перемещает объект управления в сторону уменьшения рассогласования α. Погрешность следования трансформаторной ССС от 0, 1' до 30'. Одним из параметров трансформаторной ССС является крутизна
где Uу – действующее напряжение однофазной обмотки при заданном сопротивлении нагрузки. Величины SТ составляет от 0, 5 до 2 В/град.
Цель работы Целью работы является изучение конструкций и принципа действия сельсинов, исследование характеристик сельсинов и систем синхронной связи на их основе.
Исследование сельсина В трансформаторном режиме Подключить однофазную обмотку одного из сельсинов к источнику однофазного напряжения. Первый канал осциллографа подключить к однофазной обмотке, второй канал – к любым двум выводам трехфазной обмотки. Снять зависимость амплитуды линейного напряжения трехфазной обмотки Umл от угла a. Угол a изменять от 0° до 360° через каждые 30°. Построить график зависимости Umл от a.
Синхронной связи Собрать схему в соответствии с рис.1.2. После проверки схемы преподавателем включить напряжение питания и убедиться в работоспособности системы, поворачивая за шкив ротор одного из сельсинов. Затормозить ротор одного из сельсинов. На шкиве другого сельсина закрепить нить для подвешивания груза. Снять зависимость синхронизирующего момента системы Мс от угла рассогласования a, подвешивая к нити грузы разного веса Рг. результаты измерения занести в таблицу.
Рассчитать Мс, учитывая, что радиус шкива 2 см. Построить график Мс = f(a). Определить по графику удельный синхронизирующий момент.
Системы синхронной связи Собрать схему в соответствии с рис.1.3, используя в качестве СД сельсин с тормозом. Первый канал осциллографа подключить к однофазной обмотке СД, а второй – к однофазной обмотке СП. Затормозить ротор СД. Снять зависимость амплитуды напряжения однофазной обмотки Umу от угла рассогласования a. Угол a изменять от 0° до 360° через каждые 30°. Зарисовать исследуемую схему. Построить график Umу = f(a). По данному графику определить крутизну SТ.
Оформить отчет по работе И подготовиться к защите Отчет должен содержать название и цель работы, схемы опытов, таблицы опытных данных, графики полученных характеристик, выводы о соответствии экспериментальных данных и теоретических сведений.
2.5. Контрольные вопросы 2.5.1. Конструкции контактных и бесконтактных сельсинов. 2.5.2. Схемы включения и характеристики сельсинов при их использовании в качестве датчиков положения. 2.5.3. Принцип действия индикаторной системы синхронной связи. 2.5.4. Схема и принцип действия трансформаторной системы синхронной связи.
3. ЛАБОРАТОРНАЯ РАБОТА «ИССЛЕДОВАНИЕ ВРАЩАЮЩИХСЯ ТРАНСФОРМАТОРОВ»
Цель работы Целью работы является изучение конструкций и схем включения вращающихся трансформаторов (ВТ), исследование их характеристик.
Требования к отчету Отчет должен содержать название и цель работы, схемы включения ВТ, таблицы экспериментальных данных, графики полученных зависимостей, выводы о соответствии теоретических и экспериментальных данных. 3.6. Контрольные вопросы 3.6.1. Конструкции вращающихся трансформаторов. 3.6.2. Схемы включения ВТ и их характеристики. 3.6.3. Назначение и способы симметрирования ВТ.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторным работам и курсу «Приводы роботов» для студентов специальности 220402 «Роботы и робототехнические системы» очной и очно-заочной форм обучения
Составители: Муконин Александр Константинович Трубецкой Виктор Александрович Ревнёв Станислав Сергеевич
В авторской редакции
Подписано в печать 24.11.2005. Формат 60x84/16. Бумага для множительных аппаратов. Усл. печ. л. 1, 3. Уч.-изд. л. 1, 1. Тираж 120 экз. «С» 357. Зак. № 604.
Воронежский государственный технический университет 394026 Воронеж, Московский просп., 14
Схемы включения сельсинов
где y - константа. Таким образом, информацией об угловом положении является сдвиг фазы j между питающим и выходным напряжениям. Достоинством режима фазовращателя является линейность сдвига фазы j от угла a и удобство преобразования данного сдвига в цифровой код положения. В трансформаторном режиме однофазная обмотка питается переменным напряжением
При этом создается пульсирующий магнитный поток возбуждения, направленный по оси однофазной обмотки. Этот поток наводит в фазах трехфазной обмотки ЭДС е1, е2, е3, величина которых зависит от угла a,
где n=1, 2, 3; k1 – коэффициент трансформации; a - угловое положение между осью однофазной обмотки и осью первой фазы трехфазной обмотки. В трансформаторном режиме информацией об угловом положении является величина напряжений трехфазной обмотки. На основе сельсинов также строятся системы дистанционной передачи угла (СДПУ) или, иначе говоря, системы синхронной связи (ССС). В СДПУ обеспечивается синхронный поворот механически не связанных осей. Можно выделить две основных разновидности СДПУ на основе сельсинов – индикаторную и трансформаторную системы синхронной связи. Схема индикаторной ССС приведена на рис.1.2.
, описываемым (1.3).
Рис.1.2. Схема индикаторной ССС Исходя из (1.4), в трехфазных обмотках СД и СП наводятся ЭДС, величина которых зависит от угловых положений
Если a=0, фазные ЭДС трехфазных обмоток СД и СП равны и токи в данных обмотках не протекают. Если a¹ 0, фазные ЭДС не равны, в трехфазных обмотках протекают токи, взаимодействие которых с потоками возбуждения СД и СП создает синхронизирующие моменты
где Индикаторная ССС характеризуется удельным синхронизирующим моментом
лежит в пределах (1÷ 50)·10-4НМ/град.
Индикаторная ССС используется в случаях, когда для поворота СП не требуется значительных усилий. При повороте ротора СД на тот же угол поворачивается ротор СП. Примером использования индикаторной ССС являются манипуляторы, осуществляющие перегрузку ядерного топлива на АЭС. С координатами манипулятора связаны сельсины-датчики, а на пульте оператора размещены сельсины-приемники с лимбами на валах. По положению роторов СП оператор судит о положении координат манипулятора. Основным показателем точности индикаторной ССС является погрешность следования – отклонение угла поворота ротора СП от угла поворота ротора СД. В зависимости от класса точности сельсинов диапазон данной погрешности от 30' до 1, 5°. Схема фрагмента трансформаторной ССС приведена на рис.1.3.
Рис.1.3. Фрагмент трансформаторной ССС
.
Для еу можно записать
Трансформаторная ССС используется в случаях, когда для поворота механизма, с которым связан СП, требуются значительные усилия. В таких системах выходное напряжение однофазной обмотки СП uу используется в качестве сигнала задания скорости электропривода объекта управления. При наличии uу электродвигатель перемещает объект управления в сторону уменьшения рассогласования α. Погрешность следования трансформаторной ССС от 0, 1' до 30'. Одним из параметров трансформаторной ССС является крутизна
где Uу – действующее напряжение однофазной обмотки при заданном сопротивлении нагрузки. Величины SТ составляет от 0, 5 до 2 В/град.
Схемы включения вращающихся трансформаторов
Примеры условных графических обозначений обмоток ВТ приведены на рис.1.4.

На рис.1.4, а приведено полное изображение обмоток контактного ВТ, имеющего двухфазные обмотки статора и ротора. С целью уменьшения количества контактных колец два вывода роторной обмотки объединяются. При упрощенном обозначении данного ВТ ротор представляется в виде окружности с соответствующими выводами – рис.1.4, б. Бесконтактные ВТ часто имеют одну роторную обмотку машинной части, которая соединяется с роторной обмоткой переходного кольцевого трансформатора – рис.1.4, в. Некоторые бесконтактные ВТ с ПКТ имеют две роторные обмотки машинной части, одна из которых с целью так называемого первичного симметрирования замыкается накоротко – рис.1.4, г. В зависимости от схемы включения обмоток ВТ и получаемой при этом функции параметров выходных напряжений от угла поворота ротора, в частности, различают: синусный ВТ, синусно-косинусный ВТ, линейный ВТ, фазовращатель. Схема синусного ВТ без симметрирования приведена на рис.1.5, а.

Рис.1.5. Схема синусного ВТ без симметрирования (а) и
, изменяющимся в соответствии с (1.3). Ток Iв данной обмотки создает пульсирующий поток возбуждения Фd, направленный по оси данной обмотки (продольной оси d). Если пренебречь падением напряжения на внутреннем сопротивлении обмоток ОВ, напряжение уравновешивается ЭДС  , наводимой потоком Фd, , наводимой потоком Фd,
где wэф – эффективное число витков обмотки статора. Исходя из (1.3), (1.10), максимальное значение пульсирующего магнитного потока по оси d
Таким образом, величина потока Фd определяется приложенным напряжением. Поток Фd наводит в синусной обмотке ротора SО ЭДС еS, величина которой является синусоидальной функцией угла поворота α. При холостом ходе, когда сопротивление нагрузки zHS = ∞, напряжение нагрузки
где При наличии нагрузки zHS протекает ток iS, который создает поток ФS, направленный по оси обмотки SО. Потоки, создаваемые токами iВ, iS, можно изобразить в виде векторов
 можно представить в виде суммы продольной можно представить в виде суммы продольной  и поперечной и поперечной  составляющих. Составляющая компенсируется изменениями тока iS, и результирующий поток Фd в соответствии с (1.10), (1.11) остается неизменным. Составляющая наводит в обмотке ротора дополнительную ЭДС, что приводит к отклонению зависимости напряжения нагрузки составляющих. Составляющая компенсируется изменениями тока iS, и результирующий поток Фd в соответствии с (1.10), (1.11) остается неизменным. Составляющая наводит в обмотке ротора дополнительную ЭДС, что приводит к отклонению зависимости напряжения нагрузки  от синусоиды, то есть к появлению амплитудной погрешности. Кроме того, возникает и фазовая погрешность – сдвиг фазы выходного напряжения относительно питающего. от синусоиды, то есть к появлению амплитудной погрешности. Кроме того, возникает и фазовая погрешность – сдвиг фазы выходного напряжения относительно питающего.
Для уменьшения погрешностей применяют симметрирование ВТ – первичное и вторичное. При вторичном симметрировании (рис.1.6) обе обмотки ротора – синусная SО и косинусная СО нагружаются на одинаковые сопротивления
Рис. 1.6. Схема ВТ со вторичным симметрированием (а) и векторные диаграммы магнитных потоков (б) Токи iS и iС создают потоки Вращающийся трансформатор со вторичным симметрированием фактически является синусно-косинусным. Недостатком вторичного симметрирования является необходимость соблюдения условия (1.13).
наводит в КО ЭДС, под действием которой протекает ток iк, создающий поток  . Данный поток компенсирует (рис.1.7, б), что уменьшает погрешность. . Данный поток компенсирует (рис.1.7, б), что уменьшает погрешность.

Рис. 1.7. Синусный ВТ с первичным симметрированием Недостатком первичного симметрирования является зависимость входного сопротивления ВТ от угла α. Это приводит к некоторой погрешности из-за изменения падения напряжения в контуре обмотки возбуждения.
диапазоне изменения α от -55˚ до +55˚. Схема фазовращателя с двухфазным питанием приведена на рис.1.9, а.
Рис.1.9. Схемы ВТ в режиме фазовращателя К одной из обмоток ротора подключается нагрузка zН. Обмотки статора питаются напряжениями
Создаваемое при этом вращающееся магнитное поле наводит в выходной обмотке ЭДС, фаза которой зависит от угла поворота ротора α. Для напряжения нагрузки Uвых можно записать
где Um1, ψ – константы; р – число пар полюсов ВТ. Схема фазовращателя с однофазным питанием приведена на рис.1.9, б. К роторным обмоткам присоединяются нагрузка zН, емкость С1 и резистор R1. Для получения режима фазовращателя необходимо соблюдать условия
где Частота питания ВТ обычно лежит в окрестности На основе ВТ также строятся системы дистанционной передачи угла (СДПУ), подобные трансформаторной СДПУ на сельсинах. Возможный вариант такой системы приведен на рис. 1.10.
Рис. 1.10. Вариант СДПУ с использованием ВТ
Напряжение роторной обмотки ВТ-Д uу, поступающее в устройство управления УУ, является сигналом задания скорости двигателя ОУ. Если a ¹ 0, то и ЭДС uу ¹ 0 и М1 вращает вал ОУ до устранения рассогласования a. При повороте ротора ВТ-Д на заданный угол на тот же угол поворачивается вал, с которым связан ротор ВТ-П. Рассматриваемая система используется, например, в станках с ЧПУ. При управлении координатой станка от устройства ЧПУ используется лишь ВТ-П. Выходные напряжения статорной обмотки ВТ-П служат для получения сигнала обратной связи по положению. При «ручном» управлении система переключается в режим СДПУ (рис.1.10) и координата станка управляется за счет поворота ротора ВТ-П. Вращающиеся трансформаторы являются более точными датчиками, чем сельсины.
2. ЛАБОРАТОРНАЯ РАБОТА «ИССЛЕДОВАНИЕ СЕЛЬСИНОВ»
Цель работы Целью работы является изучение конструкций и принципа действия сельсинов, исследование характеристик сельсинов и систем синхронной связи на их основе.
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 1644; Нарушение авторского права страницы
 (1.2)
(1.2) . (1.3)
. (1.3) , (1.4)
, (1.4)
 и
и  . Угол рассогласования индикаторной ССС
. Угол рассогласования индикаторной ССС . (1.5)
. (1.5) , стремящиеся устранить рассогласование a. В идеале
, стремящиеся устранить рассогласование a. В идеале (1.6)
(1.6) - константа.
- константа. (1.7)
(1.7)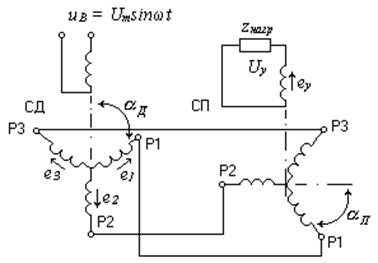
 (1.8)
(1.8) (1.9)
(1.9) (1.10)
(1.10) (1.11)
(1.11) . Для ВТ с одной парой полюсов
. Для ВТ с одной парой полюсов , (1.12)
, (1.12) - коэффициент трансформации (wэф2 – эффективное число витков обмотки ротора).
- коэффициент трансформации (wэф2 – эффективное число витков обмотки ротора). и
и  . (1.13)
. (1.13) , поперечные составляющие которых
, поперечные составляющие которых  взаимно компенсируются, - рис.1.6, б.
взаимно компенсируются, - рис.1.6, б. (1.14)
(1.14)
 (1.15)
(1.15) (1.16)
(1.16)
 (1.17)
(1.17)  и
и  - выходные сопротивления ВТ; ω – частота питания.
- выходные сопротивления ВТ; ω – частота питания.