
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Цели и задачи автоматизации технологических процессов и производств.
Иерархическая структура АСУ и её характеристики. Автоматизация – одно из направлений научно-технического прогресса, находит выражение в применении саморегулирующих технических средств, экономико-математических методов и систем управления, освобождающих человека полностью от непосредственного участия в процессах получения, преобразования, передачи и использования энергии, материалов или информации. Требует дополнительного применения контрольных устройств, использующих электронную технику и методы вычислений, копирующие нервные и мыслительные функции человека. Автоматизация технологического процесса – это совокупность методов и средств, предназначенная для реализации системы или систем, позволяющих осуществлять управление производственным процессом без непосредственного участия человека. Основными целями автоматизации технологического процесса являются: • Повышение эффективности производственного процесса • Повышение безопасности производственного процесса. Цели достигаются посредством решения следующих задач автоматизации технологического процесса: • Улучшение качества регулирования • Повышение коэффициента готовности оборудования • Улучшение эргономики труда операторов процесса Решение задач автоматизации технологического процесса осуществляется при помощи: • внедрения современных методов автоматизации; Как правило, в результате автоматизации технологического процесса, создаётся АСУ ТП. Автоматизация технологических процессов в рамках одного производственного процесса позволяет организовать основу для внедрения систем управления производством и систем управления предприятием. В связи с различностью подходов различают автоматизацию следующих технологических процессов: • Автоматизация непрерывных технологических процессов (Process Automation) • Автоматизация дискретных технологических процессов (Factory Automation) • Автоматизация гибридных технологических процессов (Hybrid Automation) Иерархическая структура С ростом числа задач управления в сложных системах значительно увеличивается объем переработанной информации и повышается сложность алгоритмов управления. В результате осуществлять управление централизованно невозможно, так как имеет место несоответствие между сложностью управляемого объекта и способностью любого управляющего органа получать и перерабатывать информацию. Кроме того, в таких системах можно выделить, следующие, группы задач, каждая из которых характеризуется соответствующими требованиями по времени реакции на события, происходящие в управляемом процессе: задачи сбора данных с объекта управления и прямого цифрового управления (время реакции, секунды, доли секунды); задачи экстремального управления, связанные с расчётами желаемых параметров управляемого процесса и требуемых значений уставок регуляторов, с логическими задачами пуска и остановки агрегатов и др. (время реакции — секунды, минуты); задачи оптимизации и адаптивного управления процессами, технико-экономические задачи (время реакции — несколько секунд); информационные задачи для административного управления, задачи диспетчеризации и координации в масштабах цеха, предприятия, задачи планирования и др. (время реакции — часы). Очевидно, что иерархия задач управления приводит к необходимости создания иерархической системы средств управления. Такое разделение, позволяя справиться с информационными трудностями для каждого местного органа управления, порождает необходимость согласования принимаемых этими органами решений, т. е. создания над ними нового управляющего органа. На каждом уровне должно быть обеспечено максимальное соответствие характеристик технических средств заданному классу задач. Кроме того, многие производственные системы имеют собственную иерархию, возникающую под влиянием объективных тенденций научно-технического прогресса, концентрации и специализации производства, способствующих повышению эффективности общественного производства. Чаще всего иерархическая структура объекта управления не совпадает с иерархией системы управления. Следовательно, по мере роста сложности систем выстраивается иерархическая пирамида управления. Управляемые процессы в сложном объекте управления требуют своевременного формирования правильных решений, которые приводили бы к поставленным целям, принимались бы своевременно, были бы взаимно согласованы. Каждое такое решение требует постановки соответствующей задачи управления. Их совокупность образует иерархию задач управления, которая в ряде случаев значительно сложнее иерархии объекта управления. 3. Практическая задача: Рассчитать основные характеристики идеального дифференцирующего звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена. Дифференциальное уравнение:
Передаточная функция:
Переходная характеристика: Это дельта-импульс с площадью К. При постоянной входной величине выходная величина дифференцирующего звена равна нулю.
КЧХ:
АЧХ:
ФЧХ:
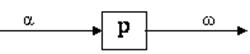
Примеры дифференцирующих звеньев Дифференцирующее звено является идеальным (физически нереализуемым) звеном. Это означает, что его нельзя реализовать искусственно. Однако такое звено может встретиться в модели объекта управления, когда две физические величины по своему определению связаны через производную. Примером таких величин могут быть угол поворота вала двигателя α и угловая скорость ω. По определению угловая скорость является производной угла:
Поэтому угол поворота может рассматриваться как входная величина, а угловая скорость – как выходная величина дифференцирующего звена (в данном случае К=1).
Также дифференцирующие звенья могут использоваться в случаях, когда не учитывается какое-то существенное свойство рассматриваемого объекта (при идеализированном его представлении).
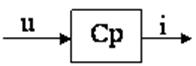
Рассмотрим идеальный конденсатор, обладающий только емкостью C и не обладающего активным сопротивлением R=0.
Таким образом, модель идеального конденсатора будет дифференцирующим звеном с передаточной функцией W(p)=Cp.
Билет 20 1. Схемы взаимодействия компьютера с периферийными устройствами. Механизмы взаимодействия компьютеров в сети многое позаим-ствовали у схемы взаимодействия компьютера с периферийными уст-ройствами, поэтому начнем рассмотрение принципов работы сети с это-го «досетевого» случая. Соединение компьютера с периферийным уст-ройством чаще всего представляет собой связь «точка-точка».Для обмена данными между компьютером и периферийным уст-ройством (ПУ) в компьютере предусмотрен внешний интерфейс, или порт (рис. 2.1), то есть набор проводов, соединяющих компьютер и пе-риферийное устройство, а также набор правил обмена информацией по этим проводам.Существуют как весьма специализированные интерфейсы, при-годные для подключения узкого класса устройств (например, графиче-ских мониторов высокого разрешения фирмы Vista), так и интерфейсы общего назначения, являющиеся стандартными и позволяющие под-ключать различные периферийные устройства. Примерами стандарт-ных интерфейсов, используемых в компьютерах, являются параллель-ный интерфейс Centronics, предназначенный, как правило, для подклю-чения принтеров, и последовательный интерфейс RS-232C, который поддерживается многими терминалами, принтерами, графопостроите-лями, манипуляторами типа «мышь» и многими другими устройствами. Интерфейс реализуется со стороны компьютера совокупностью аппаратных и программных средств: контроллером ПУ и специальной программой, управляющей этим контроллером, которую часто называют драйвером соответствующего периферийного устройства. Со стороны ПУ интерфейс чаще всего реализуется аппаратным устройством управления ПУ, хотя встречаются и программно-управляемые периферийные устройства. Программа, выполняемая процессором, может обмениваться данными с помощью команд ввода-вывода с любыми модулями, под-ключенными к внутренней шине компьютера, в том числе и с контрол-лерами ПУ. Периферийные устройства могут принимать от компьютера как данные, например байты информации, которую нужно распечатать на бумаге, так и команды управления, в ответ на которые устройство управления ПУ может выполнить специальные действия, например, пе-ревести головку диска на требуемую дорожку или же вытолкнуть лист бумаги из принтера. Периферийное устройство использует внешний ин-терфейс компьютера не только для приема информации, но и для пере-дачи информации в компьютер, то есть обмен данными по внешнему интерфейсу, как правило, является двунаправленным. Так, например, даже принтер, который по своей природе является устройством вывода информации, возвращает в компьютер данные о своем состоянии. Итак, приложение, которому требуется передать некоторые дан-ные на периферийное устройство, обращается с запросом на выполне-ние операции ввода-вывода к операционной системе. В запросе указы-ваются: адрес данных в оперативной памяти, идентифицирующая ин-формация о периферийном устройстве и операция, которую надо вы-полнить. Получив запрос, операционная система запускает соответст-вующий драйвер, передавая ему в качестве параметра адрес выводи-мых данных. Дальнейшие действия по выполнению операции ввода-вывода со стороны компьютера реализуются совместно драйвером и контроллером ПУ. Контроллер работает под управлением драйвера. Контроллеры ПУ принимают команды и данные от драйвера в свой внутренний буфер, который часто называется регистром, или портом, а затем производят необходимые преобразования данных и команд, по-лученных от драйвера, в соответствии с форматами, понятными устройству управления ПУ, и выдают их на внешний интерфейс. Распределение обязанностей между драйвером и контроллером может быть разным, но чаще всего контроллер поддерживает набор простых команд по управлению периферийным устройством, а драйвер определяет последовательность их выполнения, заставляя периферий-ное устройство совершать более сложные действия по некоторому ал-горитму. Например, контроллер принтера может поддерживать такие элементарные команды, как «Печать символа», «Перевод строки», «Возврат каретки» и т. п. Драйвер же принтера с помощью этих команд организует печать строк символов, разделение документа на страницы и другие более высокоуровневые операции. Для одного и того же кон-троллера можно разработать различные драйверы, которые с помощью одного и того же набора доступных команд будут реализовывать раз-ные алгоритмы управления ПУ. Рассмотрим схему передачи одного байта информации от при-кладной программы на периферийное устройство. Программа, которой потребовалось выполнить обмен данными с ПУ, обращается к драйверу этого устройства, сообщая ему в качестве параметра адрес байта памя-ти, который нужно передать. Драйвер загружает значение этого байта в буфер контроллера ПУ, который начинает последовательно передавать биты в линию связи, представляя каждый бит соответствующим элек-трическим сигналом. Чтобы устройству управления ПУ стало понятно, что начинается передача байта, перед передачей первого бита инфор-мации контроллер ПУ формирует стартовый сигнал специфической формы, а после передачи последнего информационного бита — столо-вый сигнал. Эти сигналы синхронизируют передачу байта. Кроме информационных бит, контроллер может передавать бит контроля четности для повышения достоверности обмена. Устройство управления, обнаружив на соответствующей линии стартовый бит, вы-полняет подготовительные действия и начинает принимать информаци-онные биты, формируя из них байт в своем приемном буфере. Если пе-редача сопровождается битом четности, то выполняется проверка пра-вильности передачи: при правильно выполненной передаче в соответ-ствующем регистре устройства управления устанавливается признак за-вершения приема информации. На драйвер обычно возлагаются наиболее сложные функции протокола (например, подсчет контрольной суммы последовательности передаваемых байтов, анализ состояния периферийного устройства, проверка правильности выполнения команды). Но даже самый прими-тивный драйвер контроллера должен поддерживать как минимум две операции: «Взять данные из контроллера в оперативную память» и «Передать данные из оперативной памяти в контроллер». В самом простом случае связь компьютеров может быть реализо-вана с помощью тех же самых средств, которые используются для связи компьютера с периферией, например, через последовательный интер-фейс RS-232C. При этом, в отличие от процедуры обмена данными компьютера с периферийным устройством, когда программа работает, как правило, только с одной стороны (со стороны компьютера), здесь происходит взаимодействие двух программ, выполняемых на каждом из компьютеров. Программа, работающая на одном компьютере, не может полу-чить непосредственный доступ к ресурсам другого компьютера — его дискам, файлам, принтеру. Она может только «попросить» об этом дру-гую программу, выполняемую на том компьютере, которому принадле-жат эти ресурсы. Эти «просьбы» выражаются в виде сообщений, переда-ваемых по каналам связи между компьютерами. Сообщения могут содер-жать не только команды на выполнение некоторых действий, но и собственно информационные данные (например, содержимое некоторого файла). Устройства межсетевого интерфейса Созданная на определенном этапе развития фирмы локальная вы-числительная сеть с течением времени перестает удовлетворять потреб-ности всех пользователей и возникает необходимость расширения ее функциональных возможностей или границ охватываемой ею террито-рии. Может возникнуть необходимость объединения внутри фирмы ЛВС различных отделов и филиалов для организации обмена данными. На-конец, стремление получить выход на новые информационные ресурсы может потребовать подключения ЛВС к сетям более высокого уровня. В качестве межсетевого интерфейса для соединения сетей между собой используются: • повторители; • мосты; • маршрутизаторы; • шлюзы. Повторители (repeater) — устройства, усиливающие электрические сигналы и обеспечивающие сохранение формы и амплитуды сигнала при передаче его на большие расстояния. Повторители описываются прото-колами канального уровня модели взаимодействия открытых систем, могут объединять сети, отличающиеся протоколами лишь на физиче-ском уровне OSI (с одинаковыми протоколами управления на канальном и выше уровнях), и выполняют лишь регенерацию пакетов данных, обеспечивая тем самым электрическую независимость сопрягаемых се-тей и защиту сигналов от воздействия помех. Использование усилителей позволяет расширить и протяженность одной сети, объединяя несколько сегментов сети в единое целое. При установке усилителя создается фи-зический разрыв в линии связи, при этом сигнал воспринимается с одной стороны, регенерируется и направляется к другой части линии связи. Мосты (bridge) — описываются протоколами сетевого уровня OSI, регулируют трафик (передачу данных) между сетями, использующими одинаковые протоколы передачи данных на сетевом и выше уровнях, выполняя фильтрацию информационных пакетов в соответствии с адре-сами получателей. Мост может соединять сети разных топологий, но ра-ботающие под управлением однотипных сетевых операционных систем. Мосты могут быть локальными и удаленными. Локальные мосты соеди-няют сети, расположенные на ограниченной территории в пределах уже существующей системы. Удаленные мосты соединяют разнесенные тер-риториально сети с использованием внешних каналов связи и модемов. Маршрутизаторы (router) — описываются и выполняют свои функции на транспортном уровне протоколов OSI и обеспечивают соединение логиче-ски не связанных сетей (имеющих одинаковые протоколы на сеансовом и выше уровнях OSI); они анализируют сообщение, определяют его даль-нейший наилучший путь, выполняют его некоторое протокольное преобра-зование для согласования и передачи в другую сеть, создают нужный логи-ческий канал и передают сообщение по назначению. Маршрутизаторы обеспечивают достаточно сложный уровень сервиса: они могут, например, соединять сети с разными методами доступа; могут перераспределять на-грузки в линиях связи, направляя сообщения в обход наиболее загружен-ных линий и т. д. Шлюзы (gateway) — устройства, позволяющие объединить вычис-лительные сети, использующие различные протоколы OSI на всех ее уровнях; они выполняют протокольное преобразование для всех семи уровней управления модели OSI. Кроме функций маршрутизаторов они выполняют еще и преобразование формата информационных пакетов и их перекодирование, что особенно важно при объединении неоднородных сетей. Мосты, маршрутизаторы и шлюзы в локальной вычислительной сети — это, как правило, выделенные компьютеры со специальным про-граммным обеспечением и дополнительной связной аппаратурой. Управление взаимодействием устройств в сети Информационные системы, построенные на базе компьютерных сетей, обеспечивают решение следующих задач: хранение данных, об-работка данных, организация доступа пользователей к данным, переда-ча данных и результатов обработки данных пользователям. В системах централизованной обработки эти функции выполняла центральная ЭВМ (Mainframe, Host). Компьютерные сети реализуют распределенную обработку дан-ных. Обработка данных в этом случае распределена между двумя объ-ектами: клиентом и сервером. Клиент—задача, рабочая станция или пользователь компьютер-ной сети. В процессе обработки данных клиент может сформировать за-прос на сервер для выполнения сложных процедур, чтение файла, поиск информации в базе данных и т. д. Сервер, определенный ранее, выполняет запрос, поступивший от клиента. Результаты выполнения запроса передаются клиенту. Сервер обеспечивает хранение данных общего пользования, организует доступ к этим данным и передает данные клиенту. Клиент обрабатывает полученные данные и представляет ре-зультаты обработки в виде, удобном для пользователя. В принципе об-работка данных может быть выполнена и на сервере. Дня подобных систем приняты термины — системы клиент-серверили архитектура клиент-сервер. Архитектура клиент-сервер может использоваться как в одноран-говых локальных вычислительных сетях, так и в сети с выделенным сервером. Одноранговая сеть.В такой сети нет единого центра управления взаимодействием рабочих станций и нет единого устройства для хране-ния данных. Сетевая операционная система распределена по всем ра-бочим станциям. Каждая станция сети может выполнять функции как клиента, так и сервера. Она может обслуживать запросы от других ра-бочих станций и направлять свои запросы на обслуживание в сеть. Пользователю сети доступны все устройства, подключенные к другим станциям (диски, принтеры). Достоинстваодноранговых сетей: низкая стоимость и высокая надежность. • зависимость эффективности работы сети от количества станций; • сложность управления сетью; • сложность обеспечения защиты информации; • трудности обновления и изменения программного обеспе-чения станций. Наибольшей популярностью пользуются одноранговые сети на базе сетевых операционных систем LANtastic, NetWareLite. Сеть с выделенным сервером. В сети с выделенным сервером один из компьютеров выполняет функции хранения данных, предназначенных для использования всеми рабочими станциями, управления взаимодействием между рабочими станциями и ряд сервисных функций. Достоинства сети с выделенным сервером: • надежная система защиты информации; • высокое быстродействие; • отсутствие ограничений на число рабочих станций; • простота управления по сравнению с одноранговыми сетями.
• высокая стоимость из-за выделения одного компьютера под сервер; • зависимость быстродействия и надежности сети от сервера; • меньшая гибкость по сравнению с одноранговой сетью. Сети с выделенным сервером являются наиболее распростра-ненными у пользователей компьютерных сетей. Сетевые операционные системы для таких сетей — LANServer(IBM), WindowsNTServerверсий 3.51 и 4, 0 и NetWare(Novell). 2. Электромагнитные измерительные преобразователи. Отличительной особенностью электромагнитных приборов, обусловливающей их широкое применение для измерений в цепях переменного и постоянного токов в качестве щитовых амперметров и вольтметров, являются их высокие эксплуатационные качества: простота конструкции, низкая стоимость, высокая надежность, устойчивость к электрическим перегрузкам, широкий диапазон измеряемых величин. Основным недостатком этих приборов является невысокая точность (отечественные электромагнитные приборы выпускаются с классами точности до 0, 5). Все электромагнитные приборы в зависимости от конструктивного исполнения и характера движения их подвижной части могут быть разделены на резонансные и нерезонансные. Каждая из этих групп приборов в свою очередь делится на две подгруппы: поляризованные и неполяризованные (в поляризованных приборах кроме намагничивающей катушки используются постоянные магниты). Так как резонансные электромагнитные приборы в настоящее время используются очень редко, то в настоящем пособии они не рассматриваются. Здесь рассмотрены лишь неполяризованные нерезонансные электромагнитные преобразователи, наиболее широко применяемые в электроизмерительной технике. Основу этих приборов составляют электромагнитные измерительные механизмы, отличающиеся как по конструктивному исполнению, так и по своим свойствам и параметрам. Принцип действия всех электромагнитных преобразователей основан на взаимодействии магнитного поля тока, протекающего в катушке, с ферромагнитным сердечником. Электромагнитные ИП могут быть выполнены так, что в результате взаимодействия магнитного поля катушки с током и ферромагнитного сердечника последний будет намагничиваться одноименно с другим неподвижным сердечником и отталкиваться от него (так называемые преобразователи отталкивающего действия), или же таким образом, что в результате воздействия магнитного поля катушки с током на ферромагнитный сердечник он будет втягиваться в магнитное поле катушки (преобразователь втяжного действия). Все конструктивные разновидности электромагнитных ИП можно свести к двум основным типам
Преобразователи с плоской катушкой (рисунок 5, а) состоят из катушки 2, в магнитном поле которой находится ферромагнитный сердечник 1 в форме усеченного диска или язычка, эксцентрически закрепленный на оси подвижной части. При протекании по катушке тока ферромагнитный сердечник втягивается в магнитный зазор катушки, поворачивая при этом ось 3 с закрепленным на ней успокоителем 4 и стрелку 5 в сторону увеличения показаний. Регулировка угла отклонения подвижной части осуществляется с помощью магнитного шунта 6. Преобразователи с плоской катушкой менее технологичны в изготовлении, чем механизмы с круглой катушкой, однако они обладают повышенной чувствительностью, меньшими габаритами и массой. Преобразователи с круглой катушкой (рисунок 5, б) состоят из катушки 1, подвижного 2 и неподвижного 3 ферромагнитных сердечников, форма которых определяется необходимостью получения требуемого характера шкалы преобразователя. При протекании по катушке тока подвижный и неподвижный сердечники намагничиваются одноименно. Подвижный сердечник отталкивается от неподвижного, поворачиваясь вместе с осью 4 и закрепленной на ней стрелкой 6. Причем сила отталкивания оказывается прямо пропорциональной значению тока, протекающего по катушке. Противодействующий момент создается с помощью спиральной пружины 5. Успокоение подвижной части осуществляется воздушным (крыльчатым) успокоителем, состоящим из закрытой камеры 7 и легкого алюминиевого крыла 8, жестко связанного с осью 4 подвижной части. Достоинством таких преобразователей является их простота, высокая технологичность изготовления и возможность получения требуемого характера шкалы (за счет выбора формы сердечников. Конструктивно сердечники могут быть цилиндрическими, призматическими или иметь другую форму). Чувствительность таких преобразователей оказывается ниже, чем у преобразователей с плоской катушкой. Из проведенного рассмотрения можно сделать некоторые выводы о свойствах, достоинствах и недостатках электромагнитных преобразователей: - электромагнитные преобразователи могут применяться для измерений в цепях как постоянного, так и переменного токов, так как направление отклонения подвижной части не зависит от направления тока в обмотке. При применении их для измерений в цепях переменного тока они измеряют среднеквадратические значения тока или напряжения; - точность электромагнитных преобразователей сравнительно невысокая вследствие влияния потерь в сердечниках (на гистерезис и вихревые токи), внешних магнитных полей, температуры окружающей среды и частоты измеряемых электрических величин; - чувствительность электромагнитных преобразователей за исключением преобразователей с замкнутым магнитопроводом невысока, следовательно, собственное потребление мощности от источников преобразуемых сигналов у них довольно значительное; - функция преобразования электромагнитных преобразователей по своему характеру является квадратичной, однако соответствующим выбором формы и местом расположения сердечника, т.е. закона изменения индуктивности при изменении угла поворота подвижной части, можно получить практически равномерную шкалу на участке от 20 до 100 % от ее верхнего предела; - электромагнитные преобразователи наиболее просты по своей конструкции, имеют низкую стоимость и надежны в работе; - электромагнитные преобразователи способны выдерживать длительные электрические перегрузки, так как токоподводящими элементами у них являются медные проводники соответствующего сечения, а не упругие элементы, создающие противодействующий момент МПР и первыми выходящие из строя при перегрузках в преобразователях других групп; - диапазон рабочих частот для электромагнитных преобразователей ограничен сверху частотами порядка нескольких десятков килогерц из-за возникновения большой частотной погрешности на высоких частотах вследствие влияния вихревых токов в сердечнике и других металлических деталей преобразователя, а также вследствие изменения индуктивного сопротивления катушки при изменении частоты. Для уменьшения дополнительных частотных погрешностей сердечники и магнитопроводы электромагнитных преобразователей выполняются из магнитомягких материалов с высоким удельным сопротивлением (пермаллоев). Существуют также электромагнитные логометрические преобразователи, которые применяются в фазометрах, частотомерах, фарадометрах и т.п. Их основные свойства аналогичны свойствам преобразователей с механическим противодействующим моментом. Электромагнитные приборы находят широкое применение в практике электрических измерений главным образом в виде различных щитовых и лабораторных амперметров и вольтметров переменного тока. Кроме того, на базе логометрических преобразователей создаются фазометры, частотомеры и фарадометры. Амперметры. Электромагнитные амперметры образуются путем непосредственного последовательного включения преобразователя в цепь измеряемого тока. Они используются для измерения сравнительно небольших токов, так как при больших токах сильное влияние на показания приборов оказывают магнитные поля токопроводящих проходов. Щитовые амперметры, как правило, изготавливаются однопредельными. Лабораторные приборы могут иметь несколько пределов измерений, которые изменяются путей секционирования обмотки катушки и включения секций последовательно или параллельно. Для расширения пределов измерения амперметров на большие токи используются измерительные трансформаторы тока. Вольтметры. Вольтметры образуются путем последовательного включения электромагнитного преобразователя и добавочного резистора RД. При этом для уменьшения температурной погрешности из-за изменения сопротивления цепи протекания измеряемого тока отношение сопротивления добавочного резистора RД, выполняемого обычно из манганина, к сопротивлению медного провода катушки не должно быть меньше определенного значения, задаваемого допустимой температурной погрешностью. Поэтому в вольтметрах, предназначенных для измерения малых напряжений, приходится уменьшать сопротивление катушки за счет уменьшения числа ее витков, что ведет к снижению чувствительности приборов. Для избежания этого, расширение пределов измерения вольтметров в сторону малых напряжений осуществляется, как правило, не за счет изменения RД, а путем секционирования катушек и перехода с последовательного включения секций на параллельное. Расширение пределов измерений в сторону больших напряжений осуществляется до 600 В с помощью добавочных резисторов, а на более высокие напряжения - с помощью измерительных трансформаторов напряжения. Из-за различного характера частотной зависимости добавочного сопротивления RД и сопротивления катушки у вольтметров могут появляться дополнительные (по сравнению с амперметрами) частотные погрешности. В проводнике, пересекающем силовые линии поля, индуцируется ЭДС, пропорциональная скорости движения проводника. При этом направление тока, возникающего в проводнике, перпендикулярно к направлению движения проводника и направлению магнитного поля. Это известный закон электромагнитной индукции — закон Фарадея. Если заменить проводник потоком проводящей жидкости, текущей между полюсами магнита, и измерять ЭДС, наведённую в жидкости по закону Фарадея, можно получить принципиальную схему электромагнитного расходомера, предложенную ещё самим Фарадеем. Таким образом, электромагнитные расходомеры могут быть выполнены как с постоянными, так и с электромагнитными, питаемыми переменным током частотой. Эти электромагнитные расходомеры имеют свои достоинства и недостатки, определяющие области их применения
Назначение и схемы АЦП Аналого-цифровой преобразователь (АЦП) предназначен для автоматического преобразования (измерения и кодирования) непрерывно изменяющихся во времени (т. е. аналоговых) величин в соответствующие значения числовых кодов. В данном случае под словом «цифра» понимается двоичный код. Когда, например, говорят о цифровой звукозаписывающей и воспроизводящей аппаратуре или о цифровой телефонии, то подразумевают, что непрерывно изменяющийся звуковой сигнал записывается или передается именно в виде двоичных (бинарных) кодов, т. е. «оцифрованным». В зависимости от способа преобразования АЦП подразделяют на последовательные, параллельные и последовательно-параллельные. На рис. 4 показан АЦП последовательного типа. По команде «Пуск» цифровой автомат ЦА вырабатывает последовательность двоичных чисел, которые поступают на вход цифро-аналогового преобразователя (ЦАП), вырабатывающего напряжение 1/иш, соответствующее каждому входному двоичному сигналу. Это напряжение Umn непрерывно растет (пока работает ЦА) и поступает на один из входов компаратора К, на другой вход которого поступает входное напряжение 11Ш. Компаратор сравнивает эти два сигнала и выдает сигнал при их равенстве. По этому сигналу останавливается ЦА, а на его выходе фиксируется двоичный код, соответствующий Um. Таким образом, преобразование в последовательном АЦП происходит в ступенчатом режиме, отдельными шагами (тактами), последовательно приближаясь к измеряемому значению. Поэтому последовательные АЦП на каждое преобразование аналогового сигнала затрачивают много времени. Для повышения их быстродействия используется метод поразрядного уравновешивания. Иллюстрирующая этот метод схема показана на рис. 5. Роль цифрового автомата выполняет регистр Рг с датчиком тактовых импульсов ДТИ. Считывание выходного кода происходит по сигналу схемы готовности данных СГД, который поступает при поступлении сигнала от компаратора К о равенстве входного напряжения UBX и напряжения Uum. Работа компаратора синхронизирована импульсами ДТИ. Эти же импульсы последовательно переводят разряды регистра Рг в состояние «1», начиная со старшего, а младшие разряды при этом остаются в состоянии «О». При этом ЦАП вырабатывает соответствующее напряжение, которое сравнивается в компараторе К с входным. Если Uuan больше
Рис.
|
Последнее изменение этой страницы: 2017-04-12; Просмотров: 4824; Нарушение авторского права страницы
 где
где  – дельта-функция;
– дельта-функция; 













 4. Аналого-цифровой преобразователь последовательного типа
4. Аналого-цифровой преобразователь последовательного типа