
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Краткий конспект лекций по курсу «Движители»Стр 1 из 2Следующая ⇒
Краткий конспект лекций по курсу «Движители» Содержание 1.Основные понятия 2.Геометрия гребного винта 3.Классификация гидравличкеских движителей и историческая справка 4.Теория идеального движителя и верхняя граница эффективности изолированного гидравлического движителя
1.Основные понятия. Гидравлические движители это часть движителей, предназначенная для работы в жидкой среде (как правило в пресной или соленой воде рек, озер, морей и океанов). Движитель вместе с двигателем и корпусом составляют гидравлический пропульсивный комплекс подвижного объекта (судна, торпеды, глубоководного аппарата, гидробионта, человека-пловца и т.д.). Главными отличительными чертами гидравлических пропульсивных комплексов от воздушных пропульсивных комплексов являются возможность возникновения кавитации и повышенные требования к прочности. Указанными отличительными чертами объясняется бросающееся в глаза различие между лопастями судовых гребных винтов и лопастями авиационных пропеллеров. Учитывая, что кавитация в воздушной среде невозможна, т.к. кавитация это фазовый переход в зоне пониженного давления среды из жидкого состояния в газообразное, цилиндрические сечения лопастей судовых гребных винтов имеют значительно меньшую относительную толщину по сравнению с цилиндрическими сечениями лопастей авиационных пропеллеров. Меньшая относительная толщина приводит к необходимости увеличения относительной ширины лопастей судовых гребных винтов по сравнению с цилиндрическими сечениями лопастей авиационных пропеллеров для обеспечения требуемой прочности лопастей. Наука, изучающая сопротивление среды равномерному и прямолинейному движению корпуса, движители и их взаимодействие с корпусом, называется «Ходкость». Академик А.Н.Крылов ввел понятие «Мореходные качества» морского подвижного объекта (например, судна). Одно из мореходных качеств было названо «Ходкость». « Ходкость» (Propulsion) этоспособность самоходного морского подвижного объекта (например, судна) к прямолинейному и равномерному движению, при эффективном использовании двигателя и движителя, преобразующих внутреннюю энергию топлива (химического или ядерного) в механическую энергию поступательного движения судна. Наука « Ходкость » состоит из двух разделов “ Сопротивление движению ” и “Движители”. “Сопротивление движению” (Resistance of ship) это часть “ Ходкости”, изучающая силу необходимую для буксировки (прямолинейно и равномерно) «голого» корпуса, т.е. корпуса без движителей. “Движители” (Propulsors) это часть “ Ходкости”, изучающая геометрию и гидродинамику (в более общем случае и аэродинамику) движителей, а также их гидродинамическое взаимодействие с корпусом судна. При изучении « Ходкости » морских подвижных объектов целесообразно различать понятия « Двигатель » и « Движитель », т.к. в отличии от авиации, где получили распостранение реактивные двигатели, объединяющие в одном агрегате и двигатель и движитель, для морских подвижных объектов подобные пропульсивные комплексы являются редкостью (например, суперкавитирующая торпеда «Шквал» с ракетным пропульсивным комплексом). Для простоты нижеследующие определения относятся к традиционному гидравлическому пропульсивному комплексу, состоящему из двигателя, гребного вала и движителя в виде одного гребного винта. Двигатель (Engine) это механическое устройство, преобразующее химическую или ядерную энергию топлива в механическую энергию вращения гребного вала. Движитель (Propulsor) – гидромеханическое устройство, преобразующее механическую энергию вращения гребного вала в механическую энергию поступательного движения корпуса судна. Изолированный движитель (движитель без корпуса или движитель в свободной воде) (Isolated propulsor) - гидромеханическое устройство, преобразующее механическую энергию вращения гребного вала в механическую энергию, создаваемую упором при поступательном равномерном движении движителя в свободной воде без корпуса (например, при испытаниях в опытовом бассейне на специальной гондоле при расположении движителя впереди гондолы или при испытаниях в кавитационной трубе). Гребной винт (ГВ) (Screw propeller, SP) – движитель, имеющий несколько крыловидных специально профилированных лопастей, закрепленных на ступице через равные угловые расстояния и способный при вращении создавать упор за счет образования подъемной силы на лопастях, при этом упор направлен по оси вращения ГВ в сторону движения, т.е. перпендикулярно плоскости вращения лопастей. Гребной вал (Propeller shaft) – вращающаяся деталь, соединяющая выходной фланец двигателя с гребным винтом (ГВ) и передающая вращающий момент. Скорость морского подвижного объекта (velocity) V – скорость прямолинейного и равномерного движения корпуса. Сопротивление (Resistance) R – модульпроекции на направление движения главного вектора гидродинамических сил, действующих на “голый” корпус судна (“голый” корпус означает корпус без движителей). Частота вращения гребного винта (Propeller r otational speed in revolutions per second) n – число оборотов гребного вала в секунду, измеряется в Гц, т.е. в 1/сек, согласно системе СИ. Упор движителя (Thrust) T – проекция на ось движителя главного вектора всех гидродинамических сил действующих на элементы (лопасти) движителя при его работе. Момент, необходимый для вращения движителя за корпусом (Torque) Q* - проекция на ось движителя вектора момента всех гидродинамических сил действующих на элементы (лопасти) движителя при его работе или равный ему по модулю момент скручивающий гребной вал непосредственно перед движителем. Момент, необходимый для вращения изолированного движителя, (Torque of Isolated propulsor) Q – проекция на ось движителя вектора момента всех гидродинамических сил действующих на элементы (лопасти) изолированного движителя при его работе. Сила засасывания (Thrust-deduction) Коэффициент засасывания (Thrust-deduction fraction) t – отношение силы засасывания к упору движителя, а именно t = Тяга движителя (Effective thrust) TE - упор движителя минус сила засасывания, а именно TE =(T- Эквивалентный изолированный движитель (Equivalent isolated propulsor) – изолированный движитель, геометрически, совпадающий с установленным на судне и развивающий при равной частоте вращения упор, равный той величине, которую он развивал за корпусом судна (обычно это определение относится к гребному винту). Расчетная скорость попутного потока (Design wake speed) VW – условная величина, характеризующая величину уменьшения по сравнению со скоростью судна скорости поступательного движения эквивалентного изолированного движителя при его испытаниях в свободной воде. Коэффициент расчетного попутного потока (Wake fraction) WT – отношениерасчетной скорости попутного потока к скорости судна (WT =VW/V). Расчетная скорость движителя (Speed of advance) VA – условная скорость движения эквивалентного изолированного движителя, равная скорости судна минус расчетная скорость попутного потока [VA=V-VW=V(1-WT)]. Или иначе поступательная скорость тележки в опытовом бассейне при испытаниях эквивалентного движителя в свободной воде (при этом геометрия, частота вращения и упор у основного и эквивалентного движителей одинаковы). Полезная мощность создаваемая движителем (Available capacity) TVA – произведение упора на расчетную скорость. Буксировочная мощность (Towing capacity) RV – мощность, необходимая для буксировки «голого» корпуса судна без движителей. Мощность, подводимая к движителю за корпусом (Delivered power) Эффективность изолированного движителя (Open water efficiency) Пропульсивный коэффициент (Propulsive efficiency) Коэффициент влияния неравномерности поля скоростей за корпусом судна на момент (irregularity influence coefficient for torque) Приведенные выше определения дают возможность получить связь между пропульсивным коэффициентом
справедливой для одновального судна с открытым гребным винтом. Величину (1-t)/(1-WT) называют коэффициентом влияния корпуса, который учитывает влияние коэффициентов взаимодействия t и WT на пропульсивный коэффициент. Например, у хорошо спроектированного одновинтового судна коэффициент влияния корпуса больше единицы примерно на 15% за счет того, что WT соответственно больше t. Для двухвальных судов приведенная формула справедлива, если все величины в правой части брать для одного из двух одинаковых в этом случае движителей и, при этом, брать половину сопротивления. В случае нескольких неодинаковых движителей или водометного движителя данная выше система определений соответствующим образом уточняется. В частности водометный движитель можно рассматривать как насос в криволинейном канале, но при этом дополнительно должно быть уточнено как определяется сопротивление (например, с закрытыми отверстиями канала), как определяется тяга и т.д.
2.Геометрия гребного винта. Плоскость диска ГВ – плоскость перпендикулярная оси ГВ и содержащая все ОЛЛ. Основная линия лопасти (ОЛЛ) – условная прямая, перпендикулярная оси и привязанная к конкретной лопасти так, что все остальные ОЛЛ, привязанные к другим лопастям, лежат в плоскости диска ГВ на одинаковом угловом расстоянии друг от друга. Цилиндрическое сечение лопасти на данном радиусе r - сечение лопасти соосным цилиндром радиуса r.
Развернутое на плоскость цилиндрическое сечение - указанное выше цилиндрическое сечение развернутое на плоскость вместе с поверхностью цилиндра, при помощи которого получено это цилиндрическое сечение. Уравнение правильной винтовой линии, содержащей хорду цилиндрического сечения на данном радиусе r, в соосной цилиндрической системе координат E(x, r,
где ось x – направлена по оси, с началом в плоскости диска ГВ, в сторону направления движения; Шаг правильной винтовой линии это расстояние вдоль оси, которое проходит точка движущаяся по этой линии за один оборот вокруг оси (см. (1)). Шаг гребного винта, точнее кромочный шаг ГВ на данном радиусе это шаг правильной винтовой линии, совпадающий с хордой, проходящей через переднюю и заднюю кромки цилиндрического сечения лопасти на рассматриваемом радиусе. Шаг обозначается P(r). Шаговое отношение - отношение шага к диаметру P/D, взятое обычно на относительном радиусе 0.7. Локальная криволинейная система координат F( Положение цилиндрического сечения лопасти в пространстве полностью определяется 4-мя параметрами: r – радиус рассматриваемого цилиндрического сечения лопасти; P – кромочный шаг этого сечения;
Математически роль этих параметров явствует из уравнений перехода от локальной системы координат F(
где Откидка (Rake) Саблевидность (Skew) Середина хорды цилиндрического сечения лопасти номер 1 на данном радиусе r имеет следующие координаты в цилиндрической системе координат E(x, r,
Величина Для характеристики геометрии цилиндрических сечений лопасти задаются в местной системе координат F(
Максимум функции Полное представление геометрии лопасти требует задания: Трех параметров Z; D; Шести функций радиуса b( Для каждого цилиндрического сечения, из числа задаваемых, должны быть известны две безразмерные функции по хорде Здесь дополнительно используются обозначения Z – число лопастей, D – диаметр, Тяга
Теорема импульсов дает
Закон сохранения массы для несжимаемой жидкости дает
Уравнение Бернулли для линий тока вне струи
Окончательная формула для тяги в трубе
В пределе при увеличении поперечного сечения трубы до бесконечности (
Мощность и потери мощности За секунду из рассматриваемого объема жидкости выносится кинетической энергии
После выкладок аналогичных выводу выражения для тяги в случае работы движителя без трубы (диаметр трубы стремится в пределе к бесконечности) можно получить
Последнее слагаемое в последней правой части выражает потери мощности
Формула Ранкина (1865) Для оптимального идеального движителя (ОИД) формулы для тяги и потерь мощности упрощаются
Замечание: Легко установить, что для ОИД
Подставляя значения
Замечание: Эта формула не применима для отрицательных значений Краткий конспект лекций по курсу «Движители» Содержание 1.Основные понятия 2.Геометрия гребного винта 3.Классификация гидравличкеских движителей и историческая справка 4.Теория идеального движителя и верхняя граница эффективности изолированного гидравлического движителя
1.Основные понятия. Гидравлические движители это часть движителей, предназначенная для работы в жидкой среде (как правило в пресной или соленой воде рек, озер, морей и океанов). Движитель вместе с двигателем и корпусом составляют гидравлический пропульсивный комплекс подвижного объекта (судна, торпеды, глубоководного аппарата, гидробионта, человека-пловца и т.д.). Главными отличительными чертами гидравлических пропульсивных комплексов от воздушных пропульсивных комплексов являются возможность возникновения кавитации и повышенные требования к прочности. Указанными отличительными чертами объясняется бросающееся в глаза различие между лопастями судовых гребных винтов и лопастями авиационных пропеллеров. Учитывая, что кавитация в воздушной среде невозможна, т.к. кавитация это фазовый переход в зоне пониженного давления среды из жидкого состояния в газообразное, цилиндрические сечения лопастей судовых гребных винтов имеют значительно меньшую относительную толщину по сравнению с цилиндрическими сечениями лопастей авиационных пропеллеров. Меньшая относительная толщина приводит к необходимости увеличения относительной ширины лопастей судовых гребных винтов по сравнению с цилиндрическими сечениями лопастей авиационных пропеллеров для обеспечения требуемой прочности лопастей. Наука, изучающая сопротивление среды равномерному и прямолинейному движению корпуса, движители и их взаимодействие с корпусом, называется «Ходкость». Академик А.Н.Крылов ввел понятие «Мореходные качества» морского подвижного объекта (например, судна). Одно из мореходных качеств было названо «Ходкость». « Ходкость» (Propulsion) этоспособность самоходного морского подвижного объекта (например, судна) к прямолинейному и равномерному движению, при эффективном использовании двигателя и движителя, преобразующих внутреннюю энергию топлива (химического или ядерного) в механическую энергию поступательного движения судна. Наука « Ходкость » состоит из двух разделов “ Сопротивление движению ” и “Движители”. “Сопротивление движению” (Resistance of ship) это часть “ Ходкости”, изучающая силу необходимую для буксировки (прямолинейно и равномерно) «голого» корпуса, т.е. корпуса без движителей. “Движители” (Propulsors) это часть “ Ходкости”, изучающая геометрию и гидродинамику (в более общем случае и аэродинамику) движителей, а также их гидродинамическое взаимодействие с корпусом судна. При изучении « Ходкости » морских подвижных объектов целесообразно различать понятия « Двигатель » и « Движитель », т.к. в отличии от авиации, где получили распостранение реактивные двигатели, объединяющие в одном агрегате и двигатель и движитель, для морских подвижных объектов подобные пропульсивные комплексы являются редкостью (например, суперкавитирующая торпеда «Шквал» с ракетным пропульсивным комплексом). Для простоты нижеследующие определения относятся к традиционному гидравлическому пропульсивному комплексу, состоящему из двигателя, гребного вала и движителя в виде одного гребного винта. Двигатель (Engine) это механическое устройство, преобразующее химическую или ядерную энергию топлива в механическую энергию вращения гребного вала. Движитель (Propulsor) – гидромеханическое устройство, преобразующее механическую энергию вращения гребного вала в механическую энергию поступательного движения корпуса судна. Изолированный движитель (движитель без корпуса или движитель в свободной воде) (Isolated propulsor) - гидромеханическое устройство, преобразующее механическую энергию вращения гребного вала в механическую энергию, создаваемую упором при поступательном равномерном движении движителя в свободной воде без корпуса (например, при испытаниях в опытовом бассейне на специальной гондоле при расположении движителя впереди гондолы или при испытаниях в кавитационной трубе). Гребной винт (ГВ) (Screw propeller, SP) – движитель, имеющий несколько крыловидных специально профилированных лопастей, закрепленных на ступице через равные угловые расстояния и способный при вращении создавать упор за счет образования подъемной силы на лопастях, при этом упор направлен по оси вращения ГВ в сторону движения, т.е. перпендикулярно плоскости вращения лопастей. Гребной вал (Propeller shaft) – вращающаяся деталь, соединяющая выходной фланец двигателя с гребным винтом (ГВ) и передающая вращающий момент. Скорость морского подвижного объекта (velocity) V – скорость прямолинейного и равномерного движения корпуса. Сопротивление (Resistance) R – модульпроекции на направление движения главного вектора гидродинамических сил, действующих на “голый” корпус судна (“голый” корпус означает корпус без движителей). Частота вращения гребного винта (Propeller r otational speed in revolutions per second) n – число оборотов гребного вала в секунду, измеряется в Гц, т.е. в 1/сек, согласно системе СИ. Упор движителя (Thrust) T – проекция на ось движителя главного вектора всех гидродинамических сил действующих на элементы (лопасти) движителя при его работе. Момент, необходимый для вращения движителя за корпусом (Torque) Q* - проекция на ось движителя вектора момента всех гидродинамических сил действующих на элементы (лопасти) движителя при его работе или равный ему по модулю момент скручивающий гребной вал непосредственно перед движителем. Момент, необходимый для вращения изолированного движителя, (Torque of Isolated propulsor) Q – проекция на ось движителя вектора момента всех гидродинамических сил действующих на элементы (лопасти) изолированного движителя при его работе. Сила засасывания (Thrust-deduction) Коэффициент засасывания (Thrust-deduction fraction) t – отношение силы засасывания к упору движителя, а именно t = Тяга движителя (Effective thrust) TE - упор движителя минус сила засасывания, а именно TE =(T- Эквивалентный изолированный движитель (Equivalent isolated propulsor) – изолированный движитель, геометрически, совпадающий с установленным на судне и развивающий при равной частоте вращения упор, равный той величине, которую он развивал за корпусом судна (обычно это определение относится к гребному винту). Расчетная скорость попутного потока (Design wake speed) VW – условная величина, характеризующая величину уменьшения по сравнению со скоростью судна скорости поступательного движения эквивалентного изолированного движителя при его испытаниях в свободной воде. Коэффициент расчетного попутного потока (Wake fraction) WT – отношениерасчетной скорости попутного потока к скорости судна (WT =VW/V). Расчетная скорость движителя (Speed of advance) VA – условная скорость движения эквивалентного изолированного движителя, равная скорости судна минус расчетная скорость попутного потока [VA=V-VW=V(1-WT)]. Или иначе поступательная скорость тележки в опытовом бассейне при испытаниях эквивалентного движителя в свободной воде (при этом геометрия, частота вращения и упор у основного и эквивалентного движителей одинаковы). Полезная мощность создаваемая движителем (Available capacity) TVA – произведение упора на расчетную скорость. Буксировочная мощность (Towing capacity) RV – мощность, необходимая для буксировки «голого» корпуса судна без движителей. Мощность, подводимая к движителю за корпусом (Delivered power) Эффективность изолированного движителя (Open water efficiency) Пропульсивный коэффициент (Propulsive efficiency) Коэффициент влияния неравномерности поля скоростей за корпусом судна на момент (irregularity influence coefficient for torque) Приведенные выше определения дают возможность получить связь между пропульсивным коэффициентом
справедливой для одновального судна с открытым гребным винтом. Величину (1-t)/(1-WT) называют коэффициентом влияния корпуса, который учитывает влияние коэффициентов взаимодействия t и WT на пропульсивный коэффициент. Например, у хорошо спроектированного одновинтового судна коэффициент влияния корпуса больше единицы примерно на 15% за счет того, что WT соответственно больше t. Для двухвальных судов приведенная формула справедлива, если все величины в правой части брать для одного из двух одинаковых в этом случае движителей и, при этом, брать половину сопротивления. В случае нескольких неодинаковых движителей или водометного движителя данная выше система определений соответствующим образом уточняется. В частности водометный движитель можно рассматривать как насос в криволинейном канале, но при этом дополнительно должно быть уточнено как определяется сопротивление (например, с закрытыми отверстиями канала), как определяется тяга и т.д.
2.Геометрия гребного винта. Плоскость диска ГВ – плоскость перпендикулярная оси ГВ и содержащая все ОЛЛ. Основная линия лопасти (ОЛЛ) – условная прямая, перпендикулярная оси и привязанная к конкретной лопасти так, что все остальные ОЛЛ, привязанные к другим лопастям, лежат в плоскости диска ГВ на одинаковом угловом расстоянии друг от друга. Цилиндрическое сечение лопасти на данном радиусе r - сечение лопасти соосным цилиндром радиуса r.
Развернутое на плоскость цилиндрическое сечение - указанное выше цилиндрическое сечение развернутое на плоскость вместе с поверхностью цилиндра, при помощи которого получено это цилиндрическое сечение. Уравнение правильной винтовой линии, содержащей хорду цилиндрического сечения на данном радиусе r, в соосной цилиндрической системе координат E(x, r,
где ось x – направлена по оси, с началом в плоскости диска ГВ, в сторону направления движения; Шаг правильной винтовой линии это расстояние вдоль оси, которое проходит точка движущаяся по этой линии за один оборот вокруг оси (см. (1)). Шаг гребного винта, точнее кромочный шаг ГВ на данном радиусе это шаг правильной винтовой линии, совпадающий с хордой, проходящей через переднюю и заднюю кромки цилиндрического сечения лопасти на рассматриваемом радиусе. Шаг обозначается P(r). |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 1036; Нарушение авторского права страницы
 – дополнительное сопротивление, возникающее на корпусе при работе движителя (фактически возникает за счет разрежения, имеющего место в жидкости перед движителем).
– дополнительное сопротивление, возникающее на корпусе при работе движителя (фактически возникает за счет разрежения, имеющего место в жидкости перед движителем). / T.
/ T. - определяется произведением угловой скорости вращения вала
- определяется произведением угловой скорости вращения вала  на момент Q*, т.е.
на момент Q*, т.е.  . Мощность, подводимая к эквивалентному изолированному движителю (Delivered power of equivalent isolated propulsor) PD – определяется произведением угловой скорости вращения вала
. Мощность, подводимая к эквивалентному изолированному движителю (Delivered power of equivalent isolated propulsor) PD – определяется произведением угловой скорости вращения вала  .
. - отношение полезной мощности, создаваемой изолированным движителем, к мощности, затраченной на работу движителя, т.е. определяется по формуле
- отношение полезной мощности, создаваемой изолированным движителем, к мощности, затраченной на работу движителя, т.е. определяется по формуле  - отношение полезной мощности поступательного движения судна к мощности, затраченной на работу движителя за корпусом, т.е. определяется формулой
- отношение полезной мощности поступательного движения судна к мощности, затраченной на работу движителя за корпусом, т.е. определяется формулой  - отношение мощности, подводимой к движителю за корпусом, к мощности, подводимой к эквивалентному изолированному движителю, а именно
- отношение мощности, подводимой к движителю за корпусом, к мощности, подводимой к эквивалентному изолированному движителю, а именно 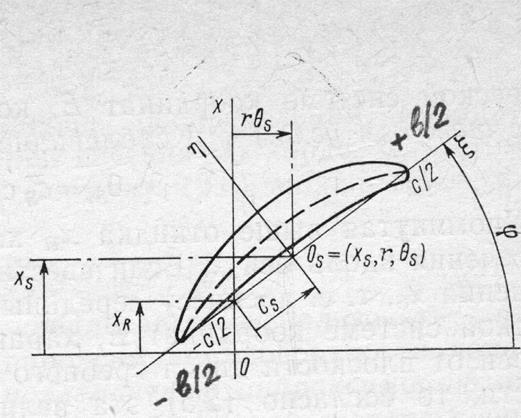
 ) имеет вид:
) имеет вид:  , для ГВ правого вращения;
, для ГВ правого вращения;  , для ГВ левого вращения, (1)
, для ГВ левого вращения, (1) - откидка (rake) рассматриваемого цилиндрического сечения;
- откидка (rake) рассматриваемого цилиндрического сечения;  ) это система координат, предназначенная для описания цилиндрических сечений лопасти илежащая на поверхности соосного цилиндра радиуса r, первая координата направлена к передней кромке по указанной выше винтовой линии и совпадает с хордой цилиндрического сечения лопасти на радиусе r, начало системы F совпадает с серединой хорды, вторую координату удобно рассматривать в плоскости, на которую развернуто соответствующее цилиндрическое сечение, т.к. на этой плоскости вторая координата является прямой, перпендикулярной к хорде, при этом за положительное направление принято такое, которое совпадает с направлением от нагнетающей поверхности к засасывающей, т.е. от задней стороны лопасти к передней по ходу судна.
) это система координат, предназначенная для описания цилиндрических сечений лопасти илежащая на поверхности соосного цилиндра радиуса r, первая координата направлена к передней кромке по указанной выше винтовой линии и совпадает с хордой цилиндрического сечения лопасти на радиусе r, начало системы F совпадает с серединой хорды, вторую координату удобно рассматривать в плоскости, на которую развернуто соответствующее цилиндрическое сечение, т.к. на этой плоскости вторая координата является прямой, перпендикулярной к хорде, при этом за положительное направление принято такое, которое совпадает с направлением от нагнетающей поверхности к засасывающей, т.е. от задней стороны лопасти к передней по ходу судна. - саблевидность (skew).
- саблевидность (skew). ; (2)
; (2) , (3)
, (3) - шаговый угол рассматриваемого сечения.
- шаговый угол рассматриваемого сечения.  ; (4)
; (4) ; (5)
; (5) ; (6)
; (6) называется полной откидкой и характеризует расстояние, измеренное вдоль оси, от середины хорды до диска ГВ, величина
называется полной откидкой и характеризует расстояние, измеренное вдоль оси, от середины хорды до диска ГВ, величина  называется углом саблевидности и характеризует смещение середины хорды рассматриваемого сечения по углу
называется углом саблевидности и характеризует смещение середины хорды рассматриваемого сечения по углу  от угла, соответствующего ОЛЛ рассматриваемой лопасти.
от угла, соответствующего ОЛЛ рассматриваемой лопасти. и
и  , т.е. ординаты передней (засасывающей) и задней (нагнетающей) сторон рассматриваемого сечения соответственно. При этом легко найти связь этих функций с распределением толщины
, т.е. ординаты передней (засасывающей) и задней (нагнетающей) сторон рассматриваемого сечения соответственно. При этом легко найти связь этих функций с распределением толщины  и распределением кривизны
и распределением кривизны  по хорде для этого цилиндрического сечения лопасти, а именно
по хорде для этого цилиндрического сечения лопасти, а именно ; (7)
; (7) ; (8)
; (8) называется максимальной относительной толщиной сечения. Максимум функции
называется максимальной относительной толщиной сечения. Максимум функции  , а отношение этой величины к длине хорды
, а отношение этой величины к длине хорды  называется максимальной относительной кривизной сечения.
называется максимальной относительной кривизной сечения.  ;
;  )/D; P(
)/D; P(  (
(  (
(  , (1)
, (1) , (2)
, (2) , (3)
, (3) , (4)
, (4) и
и  )
) , (5)
, (5) и потенциальной энергии
и потенциальной энергии  . Эта мощность должна компенсироваться подводимой к движителю мощностью
. Эта мощность должна компенсироваться подводимой к движителю мощностью  , которая состоит из двух частей полезной мощности
, которая состоит из двух частей полезной мощности  , создаваемой движителем, и потерянной мощности
, создаваемой движителем, и потерянной мощности  , которая необходима для формирования следа, а именно
, которая необходима для формирования следа, а именно =
=  ; (7)
; (7) ; (8)
; (8) ; (27)
; (27) ; (28)
; (28) для ОИД (это принято как основное предположение) необходимо дополнительное условие
для ОИД (это принято как основное предположение) необходимо дополнительное условие ; (28а)
; (28а) , легко найти формулу Ранкина
, легко найти формулу Ранкина ; (29)
; (29) (см.28а) и для швартовного режима, когда
(см.28а) и для швартовного режима, когда  . В случае швартовного режима применимы только размерные критерии эффективности. Например, отношение тяги к мощности
. В случае швартовного режима применимы только размерные критерии эффективности. Например, отношение тяги к мощности ; (30)
; (30)