|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОБЩИЕ СВЕДЕНИЯ О МОДЕЛИРОВАНИИ СИСТЕМСтр 1 из 14Следующая ⇒
ВВЕДЕНИЕ Моделирование – это методология научной и практической деятельности людей, основанная на построении, исследовании и использовании моделей. Моделирование решает задачи изучения и исследования объектов и систем, предсказания их функционирования и поведения. При управлении модели позволяют оценивать ненаблюдаемые переменные процесса функционирования системы, прогнозировать состояние процесса при имеющихся или выбираемых управлениях и синтезировать алгоритмы и стратегии управления. При проектировании и эксплуатации систем возникают многочисленные задачи, требующие оценки количественных и качественных закономерностей процессов их функционирования, проведения структурного, алгоритмического и параметрического синтеза. Решение этих проблем невозможно без использования математического моделирования, что обусловлено особенностями больших систем, такими как сложность структур, стохастичность связей между элементами и внешней средой, неоднозначность алгоритмов поведения, большое количество параметров и переменных, неполнота и недетерминированность исходной информации. Математическое моделирование позволяет существенно уменьшить время проектирования, во многих случаях позволяет найти оптимальное решение, исключить метод натурных проб и ошибок, перейти к параллельному процессу проектирования. Математическая модель представляет собой формализованное описание системы на некотором абстрактном языке, например, в виде совокупности математических соотношений или алгоритма. Именно математические модели рассматриваются как основной инструмент оценки эффективности альтернативных решений. С развитием вычислительной техники наиболее эффективным и универсальным методом исследования систем стало компьютерное (машинное) моделирование, сущность которого состоит в проведении на ЭВМ экспериментов с моделью, представляющей собой программный комплекс, описывающий формально и алгоритмически поведение элементов системы в процессе её функционирования, т.е. их взаимодействие друг с другом и внешней средой. Краткое изложение основ теории моделирования является основной задачей данного учебного пособия.
“Определите значения слов, И вы избавите человечество От половины его заблуждений”. Р.Декарт Принципы подхода в моделировании систем В моделировании систем используются классический (индуктивный) и системный (дедуктивный) подходы [8]. Классический подход рассматривает исследуемую систему с точки зрения выполняемых функций (функциональный подход) и предполагает создание модели путём перехода от частного к общему слиянием её отдельных компонент, разрабатываемых отдельно. Процесс синтеза модели на основе классического подхода схематично представлен на рис. 1.2 и включает следующие этапы: 1. Декомпозиция реальной системы, подлежащей моделированию, на отдельные подсистемы. 2. Выбор исходных данных для моделирования, включающих: – назначение; – условия работы; – внешнюю среду; – ограничения. 3. Постановка целей, отображающих отдельные стороны процесса моделирования системы. 4. Формирование на базе целей и исходных данных компонент будущей модели. 5. Совокупность компонент объединяется в модель.
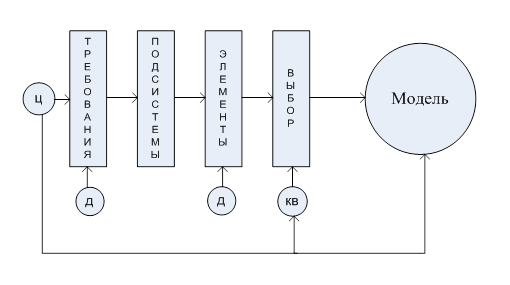
Рис. 1.2. Процесс синтеза модели на основе классического подхода: Д – исходные данные; Ц – цели; К – компонента модели Таким образом, разработка модели на основе классического подхода означает суммирование отдельных компонент в единую модель, причём каждая из компонент решает свои собственные задачи и изолирована от других частей модели. Поэтому классический подход может быть использован для реализации сравнительно простых моделей, в которых возможно разделение и взаимно независимое рассмотрение отдельных сторон функционирования реального объекта. Системный подход рассматривает исследуемую систему в виде целенаправленного множества взаимосвязанных элементов (структурный подход) и предполагает создание модели путём перехода от общего к частному, когда в основе рассмотрения лежит цель, при этом исследуемый объект выделяется из окружающей среды. Процесс синтеза модели на основе системного подхода схематично представлен на рис. 1.3 и включает следующие этапы: 1. На основе цели функционирования системы, которая определяется вопросами, на которые исследователь хочет получить ответы с помощью модели, и исходных данных, включающих назначение модели, условия работы системы, внешнюю среду для системы и накладываемые ограничения, формируются требования к модели системы. 2. Определение подсистем модели на базе сформированных требований. 3. Подбор элементов подсистем модели на основе данных для их реализации. 4. Выбор составляющих элементов будущей модели на основе сформированных критериев выбора. 5. Получившаяся таким образом модель является интегрированным целым.
Рис. 1.3. Процесс синтеза модели на основе системного подхода: Ц – цель моделирования; Д – исходные данные; КВ – критерии выбора
Системный подход позволяет решить проблему построения модели сложной системы с учетом всех факторов и взаимосвязей, пропорциональности их значимости на всех этапах исследования системы и построения модели. Системный подход означает, что каждая система является интегрированным целым даже тогда, когда она состоит из отдельных разобщённых подсистем. Таким образом, в основе системного подхода лежит рассмотрение системы как интегрированного целого, причём это рассмотрение при разработке начинается с главного: формулировки цели функционирования. В настоящее время при анализе и синтезе больших систем получил распространение системный подход, который позволяет учитывать сложные стохастические связи в системе и взаимодействие с внешней средой. Модель в этом случае создается под поставленную проблему, а моделирование заключается в решении проблемы цели, проблемы построения модели, проблемы работы с моделью. Для правильно выбранной модели характерным является то, что она выявляет лишь те закономерности, которые нужны исследователю, и не рассматривает свойства системы, не существенные для данного исследования. При имитационном моделировании в качестве имитационной модели выступает алгоритм, воспроизводящий процесс функционирования исследуемой системы, при этом имитируются элементарные явления составляющего процесса, с сохранением их логической структуры и последовательности протекания во времени, что позволяет по исходным данным получить сведения о состояниях процесса в определённые моменты времени, дающие возможность оценить характеристики системы. Компьютер при имитационном моделировании служит имитатором исследуемой системы Основным преимуществом имитационного моделирования по сравнению с аналитическим является возможность решения более сложных задач. Метод имитационного моделирования позволяет решать задачи анализа больших систем, включая задачи оценки: вариантов структуры системы, эффективности различных алгоритмов управления системой, влияния изменения параметров системы. Имитационное моделирование может быть положено также в основу структурного, алгоритмического и параметрического синтеза больших систем, когда требуется создать систему с заданными характеристиками при определённых ограничениях, которая является оптимальной по выбранным критериям оценки эффективности. Комбинированное (аналитико-имитационное) моделирование при анализе и синтезе систем позволяет объединить достоинства аналитического и имитационного моделирования. При построении комбинированных моделей проводится декомпозиция процесса функционирования объекта на составляющие подпроцессы, и для тех из них, где это возможно, используются аналитические модели, а для остальных подпроцессов строятся имитационные модели. Такой комбинированный подход позволяет охватить качественно новые классы систем, которые не могут быть исследованы с использованием только аналитического и имитационного моделирования в отдельности. При реальном моделировании используется возможность исследования различных характеристик либо на реальным объекте целиком, либо на его части. Отличие эксперимента от реального протекания процесса заключается в том, что в нём могут появиться отдельные критические ситуации. В ходе эксперимента вводятся новые факторы и возмущающие воздействия в процессе функционирования объекта. Реальное моделирование подразделяется на натурное и физическое. Натурным моделированием называют проведение исследования на реальном объекте с последующей обработкой результатов эксперимента на основе теории подобия. При функционировании объекта в соответствии с поставленной целью удаётся выявить закономерности протекания реального процесса. Разновидности натурного моделирования, как комплексные испытания, производственный эксперимент и натурный эксперимент, обладают высокой степенью достоверности. Физическое моделирование отличается от натурного тем, что исследование проводится на установках, которые сохраняют природу явлений и обладают физическим подобием. В процессе физического моделирования задаются некоторые характеристики внешней среды и исследуется поведение либо реального объекта, либо его модели при заданных или создаваемых искусственно воздействиях внешней среды. Физическое моделирование может протекать в реальном и нереальном (псевдореальном) масштабах времени, а также может рассматриваться без учёта времени. Реальное моделирование является наиболее адекватным, но при этом его возможности с учётом особенностей реальных объектов ограничены. С точки зрения математического описания объекта и в зависимости от его характера модели можно разделить на модели аналоговые (непрерывные), цифровые (дискретные) и аналого-цифровые (комбинированные). Под аналоговой моделью понимается модель, которая описывается уравнениями, связывающими непрерывные величины. Под цифровой понимается модель, которая описывается уравнениями, связывающими дискретные величины, представленные в цифровом виде. Под аналого-цифровой понимается модель, которая может быть описана уравнениями, связывающими непрерывные и дискретные величины. Особый вид моделирования – кибернетическое моделирование, в котором отсутствует непосредственное подобие между реальным объектом и моделью. В этом случае стремятся отобразить лишь некоторую функцию и рассматривают реальный объект как “чёрный ящик”, имеющий ряд входов и выходов, и моделируются некоторые связи между выходами и входами. Чаще всего при использовании кибернетических моделей проводят анализ поведенческой стороны объекта при различных воздействиях внешней среды. Таким образом, в основе кибернетических моделей лежит отношение некоторых информационных процессов управления, что позволяет оценить поведение реального объекта. “Высшее назначение математики - Находить порядок в хаосе, Который нас окружает “. Н.Винер Т а б л и ц а 2.1 Таблица переходов и входов автомата Мили
Т а б л и ц а 2.2 Таблица переходов и входов автомата Мили с тремя состояниями (z0, z1, z2), двумя входными (x1, x2) и двумя выходными (y1, y2) сигналами
Описание работы F –автоматов Мура иллюстрируется таблицей 2.3, а пример табличного способа задания F –автомата Мура с пятью состояниями (z0, z1, z2, z3, z4), двумя входными (x1, x2) и тремя выходными (y1, y2, y3) сигналами приведён в таблице 2.4. Графический способ задания конечного автомата использует понятие направленного графа. Граф автомата представляет собой набор вершин, соответствующих различным состояниям автомата и соединяющих вершины дуг графа, соответствующих тем или иным переходам автомата. Если входной сигнал xk вызывает переход из состояния zi в состояние zj, то на графе автомата дуга, соединяющая вершину zi с вершиной zj, обозначается xk. Для того чтобы задать функцию выходов, дуги графа необходимо отметить соответствующими выходными сигналами.
Т а б л и ц а 2.3 Отмеченная таблица переходов автомата Мура
Т а б л и ц а 2.4 Отмеченная таблица переходов автомата Мура с пятью состояниями (z0, z1, z2, z3, z4), двумя входными (x1, x2) и тремя выходными (y1, y2, y3) сигналами
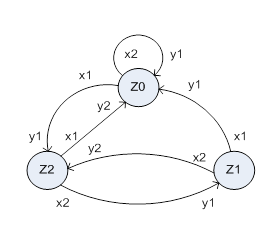
Для автоматов Мили эта разметка производится так: если входной сигнал xk действует на состояние zi, то, согласно сказанному, получается дуга, исходящая из zi и помеченная xk; эту дугу дополнительно отмечают выходным сигналом y = ψ (zi, xk). На рис. 2.3 приведён заданный ранее таблицей 2.2 граф F –автомата Мили.
Рис. 2.3. Граф автомата Мили
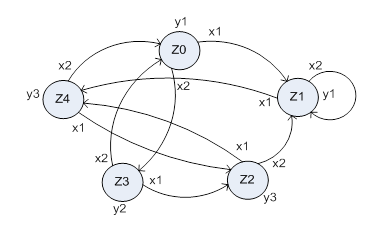
Для автоматов Мура аналогичная разметка графа такова: если входной сигнал xk, действуя на некоторое состояние zi автомата, вызывает переход в состояние zj, то дугу, направленную в zj и помеченную xk, дополнительно отмечают выходным сигналом y = ψ (zj, xk). На рис. 2.4 приведён заданный ранее таблицей 2.4 граф F –автомата Мура.
Рис. 2.4. Граф автомата Мура
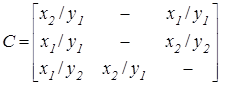
Матричный способ задания конечного автомата часто является более удобной формой. При этом матрица соединений автомата есть квадратная матрица C = [cij], строки которой соответствуют исходным состояниям, а столбцы – состояниям перехода. В случае F –автомата Мили элемент cij = xk/ys, стоящий на пересечении i-ой строки и j-го столбца, соответствует входному сигналу xk, вызвавшему переход из состояния zi в состояние zj, и выходному сигналу ys, выдаваемому при этом переходе. Для автомата Мили, рассмотренного выше, матрица соединений имеет вид
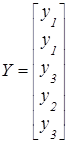
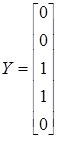
Если переход из состояния zi в состояние zj происходит под действием нескольких сигналов, элемент матрицы cij представляет собой множество пар «вход-выход» для этого перехода, соединённых знаком дизъюнкции. Для F –автомата Мура элемент cij = xk/ys равен множеству входных сигналов на переходе (zi, zj), а выход описывается вектором выходов, i-я компонента которого – выходной сигнал, отмечающий состояние zi. Для автомата Мура, рассмотренного выше, матрица соединений и вектор выходов имеют вид
Для детерминированных автоматов выполняется условие однозначности переходов: автомат, находящийся в некотором состоянии, под действием любого входного сигнала не может перейти более чем в одно состояние. Это означает, что в графе автомата из любой вершины не могут выходить две и более дуг, отмеченных одним и тем же входным сигналом, а в матрице соединений в каждой строке входной сигнал не должен встречаться более одного раза. Рассмотрим таблицу переходов и граф асинхронного конечного автомата. Для F –автомата состояние zk называется устойчивым, если для любого входа xi Î X, для которого φ (zk, xi) = zk имеет место ψ (zk, xi) = yk. Таким образом, F –автомат называется асинхронным, если каждое его состояние zk Î Z устойчиво. Ниже приведён пример асинхронного автомата Мура, заданного таблично (табл.2.5) и графически (рис.2.5). Т а б л и ц а 2.5 Отмеченная таблица переходов асинхронного автомата Мура с тремя состояниями (z0, z1, z2), тремя входными (x1, x2, x3) и тремя выходными (1y, y2, y3) сигналами
Рис. 2.5. Граф асинхронного автомата Мура
В таблице переходов асинхронного автомата некоторое состояние zk стоит на пересечении строки xi и столбца zs (s ¹ k), и это состояние zk обязательно должно встретиться в этой же строке в столбце zk. В графе асинхронного автомата, если в некоторое состояние имеются переходы из других состояний под действием каких-то сигналов, то в вершине zk должна быть петля, отмеченная символами тех же входных сигналов. Понятие F –автоматаявляется математической абстракцией, удобной для описания широкого класса процессов функционирования реальных объектов, для которых характерно наличие дискретных состояний и дискретный характер работы во времени. Но широта применения не означает универсальности F –схем. Этот подход не пригоден для описания процессов в динамических системах с наличием переходных процессов, для формализации которых используются решётчатые функции и разностные уравнения, Z –преобразование и описание в пространстве состояний [14]. 2.3.3. Дискретно-стохастические модели (P–схемы) Использование P –схем позволяет формализовать процесс функционирования дискретных систем, проявляющих статистически закономерное случайное поведение. Вероятностный автомат (англ. Probabilistic Automata) определяется как дискретный потактовый преобразователь информации с памятью, функционирование которого в каждом такте зависит только от состояния памяти в нём и может быть описано статистически [8]. Применение схем вероятностных автоматов ( P –схем) имеет важное значение для разработки методов проектирования дискретных систем, проявляющих статистически закономерное случайное поведение, для выяснения алгоритмических возможностей таких систем и обоснования границ целесообразности их использования, а также для решения задач синтеза по выбранному критерию дискретных стохастических систем, удовлетворяющих заданным ограничениям. Введём математическое понятие P –автомата, используя понятия, введённые для F –автомата. Рассмотрим множество G, элементами которого являются всевозможные пары (xi, zs), где xi и zs – элементы входного множества X и множества состояний Z соответственно. Если существуют две такие функции φ и ψ , что с их помощью осуществляются отображения G®Z и G®Y, то говорят, что F = < X, Y, Z, φ , ψ , z0 > определяет автомат детерминированного типа. Введём в рассмотрение более общую математическую схему. Пусть Ф – множество всевозможных пар вида (zk, yj), где yj – элементы выходного множества Y. Потребуем, чтобы любой элемент множества G индуцировал на множестве Ф некоторый закон распределения следующего вида:
При этом Пусть элементы множества G индуцируют некоторые законы распределения на множествах Y и Z, что можно представить соответственно в виде:
При этом Если для всех k и j имеет место соотношение qkzj = bkj, то такой P –автомат называется вероятностным автоматом Мили. Это требование означает выполнение условия независимости распределений для нового состояния P –автомата и его выходного сигнала. Пусть теперь определение выходного сигнала P –автомата зависит лишь от того состояния, в котором находился автомат в данном такте работы. Другими словами, пусть каждый элемент выходного множества Y индуцирует распределения вероятностей выходов, имеющих следующий вид:
Здесь Если для всех k и i имеет место соотношение zksi = bki, то такой P –автомат называется вероятностным автоматом Мура. Понятие P –автоматовМили и Мура введено по аналогии с детерминированным F –автоматом. Частным случаем P –автомата, задаваемого как P = < X, Y, Z, B >, являются автоматы, у которых либо переход в новое состояние, либо выходной сигнал определяются детерминированно. Если выходной сигнал P –автоматаопределяется детерминированно, то такой автомат называется Y –детерминированным вероятностным автоматом. Аналогично, Z –детерминированным вероятностным автоматом называется P –автомат, у которого выбор нового состояния является детерминированным. Способы задания работы P –автоматовтакие же, как и для F –автоматов. В качестве примера рассмотрим Y –детерминированный вероятностный автомат, заданный таблицей переходов (табл. 2.6) и таблицей выходов (табл.2.7). До начала работы P –автоматвсегда находится в начальном состоянии z0 и в нулевой такт времени начинает изменять своё состояние в соответствии с заданным распределением.
Т а б л и ц а 2.6 Таблица переходов Y – детерминированного вероятностного автомата
Т а б л и ц а 2.7 Таблица выходов Y – детерминированного вероятностного автомата
Для рассматриваемого P –автомата матрица соединений и вектор выходов имеют вид
В матрице соединений Y–детерминированного вероятностного автомата элемент cij = pij определяется вероятностью перехода P –автомата в состояние zj из состояния zi при поступлении входного сигнала, а выход описывается вектором выходов, i-я компонента которого – выходной сигнал, отмечающий состояние zi. Описанный Y–детерминированный P –автомат можно задать в виде ориентированного графа (рис. 2.6), вершины которого сопоставляются состояниям автомата, а дуги – возможным переходам из одного состояния в другое. Дуги имеют веса, соответствующие вероятностям перехода pij, а около вершин графа пишутся значения выходных сигналов, индуцируемых этими состояниями.
Рис. 2.6. Граф Y –детерминированного вероятностного автомата
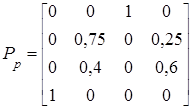
Оценим суммарную финальную вероятность пребывания этого P –автомата в состояниях z2 и z3. При этом начальное состояние z0 можно не учитывать, так как начальное распределение не оказывает влияния на значения финальных вероятностей. Тогда матрица вероятностей перехода автомата будет иметь вид
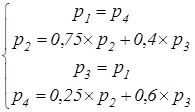
откуда получаем систему уравнений, определяющих вероятности финального пребывания автомата в состояниях pj (
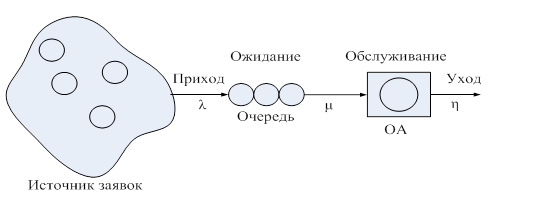
Добавим к этим уравнениям условие нормировки p1 + p2 + p3 + p4 = 1. Тогда, решая систему уравнений, получим p1 = p3 = p4 = 5/23, p2 = 8/23. Таким образом, p2 + p3 = 13/23 = 0, 5652. Другими словами, при бесконечной работе заданного в этом примере Y –детерминированного вероятностного автомата на его выходе формируется двоичная последовательность с вероятностью появления единицы, равной 0, 5652. Для оценки различных характеристик исследуемых систем, представленных в виде P –схем, кроме рассмотренного случая аналитических моделей, можно применять и имитационные модели, реализуемые, например, методом статистического моделирования. 2.3.4. Непрерывно-стохастические модели (Q–схемы) Использование Q –схем позволяет формализовать процессы функционирования систем, которые, по своей сути, являются процессами обслуживания. Q –схемы применяются в качестве типовых математических схем систем массового обслуживания (англ. Queueing System) [8]. В качестве процесса обслуживания могут быть представлены различные по своей физической природе процессы функционирования экономических, производственных, технических и других систем, например: потоки поставок продукции предприятию, потоки деталей и комплектующих изделий на сборочном конвейере цеха, заявки на обработку информации ЭВМ от удалённых терминалов и т.д. Характерным для работы подобных объектов является стохастический характер процесса их функционирования, проявляющийся: – в случайном появлении заявок (требований) на обслуживание; – в завершении обслуживания в случайные моменты времени. Рассмотрим основные понятия систем массового обслуживания (СМО), необходимые для использования Q –схем, как при аналитическом, так и при имитационном подходе. Элементы СМО. В СМО фигурируют: 1. Средства обслуживания – обслуживающие аппараты (ОА) или каналы обслуживания (К). Средства обслуживания являются статическими элементами Q –схем. 2. Обслуживаемые заявки – транзакты. Являются динамическими элементами Q –схем. 3. Очереди. Состояние СМО характеризуется: 1. Состояниями всех обслуживающих аппаратов, каждый из которых может находиться в состоянии “занят” или “свободен”. 2. Состояниями всех транзактов, каждый из которых может находиться в состоянии “обслуживание” или “ожидание”. 3. Состояниями всех очередей к обслуживающим аппаратам, определяемыми количеством находящихся в них транзактов. Переменные СМО. Переменные величины разделяются на независимые и системные. Независимые величины СМО характеризуются двумя случайными переменными: а) интервал прибытия – интервал времени между последовательными моментами прибытия заявок в систему; б) время обслуживания – время, требуемое обслуживающему аппарату для выполнения обслуживания. Системные величины СМО являются предметом исследования системы и назначаются исследователем, например: а) число заявок, прибывших на обслуживание за заданный промежуток времени; б) число заявок, которые попали на обслуживание сразу же по прибытии; в) среднее время пребывания заявок в очереди; г) средние длины очередей; д) максимальная длина очереди; е) нагрузка обслуживающего аппарата, являющаяся функцией времени, которое потрачено ОА на обслуживание в течение заданного промежутка времени и т.д. На рис. 2.7 приведён пример системы обслуживания одним обслуживающим аппаратом и очередью. Система функционирует следующим образом. Заявка из источника заявок приходит на обслуживание. Если обслуживающий аппарат свободен, то заявка занимает его, и начинается процесс обслуживания. Если обслуживающий аппарат занят, то заявка поступает в очередь, где ожидает окончания обслуживания предыдущей заявки. Обслуженная заявка освобождает обслуживающий аппарат и покидает систему. Заявки, приходящие на обслуживание, образуют поток заявок; заявки, поступающие на обслуживание, образуют поток обслуживания; а заявки, покидающие систему по окончании обслуживания, образуют выходной поток. Эти потоки характеризуются интенсивностью l прихода заявок на обслуживание, интенсивностью m обслуживания и интенсивностью h ухода заявок из системы.
Рис. 2.7. Система обслуживания одним обслуживающим аппаратом и очередью
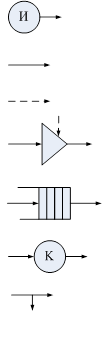
Для графического изображения СМО введена символика Q –схем. Для начертания Q –схем используются следующие основные элементы.
1. Источник заявок;
2. Материальные потоки (движение транзактов);
3. Информационные потоки (управляющие сигналы);
4. Клапан;
5. Накопитель;
6. Канал обслуживания;
7. Узел − правило, в соответствии с которым направляются транзакты.
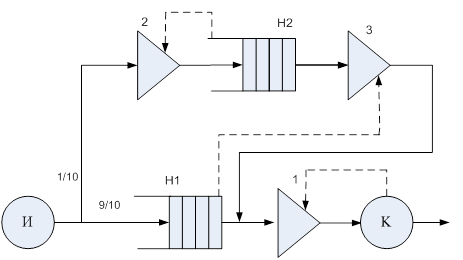
В качестве примера графического изображения Q –схемы на рис. 2.8 приведена система обслуживания со страховым заделом. Движение заявок через Q –схему представляет собой материальные потоки. А для управления системы обслуживания используются информационные потоки.
Рис. 2.8. Система обслуживания со страховым заделом: И – источник заявок; Н1 и Н2 – накопители; К – канал обслуживания; 1, 2, 3 – клапаны Все изменения, происходящие в системе, характеризуются событиями, которые образуют потоки событий. Потоком событий называется последовательность событий, происходящих одно за другим в случайные моменты времени. Различают следующие потоки событий [8]. |
Последнее изменение этой страницы: 2017-04-13; Просмотров: 568; Нарушение авторского права страницы

 . (2.9)
. (2.9)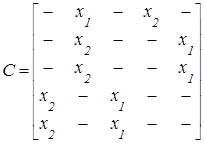 ;
;  . (2.10)
. (2.10)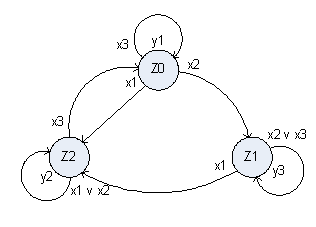
 , где bkj – вероятность перехода автомата в состояние zk и появления на выходе сигнала yj, если он был в состоянии zs, и на его вход в этот момент времени поступил сигнал xi. Число таких распределений, представленных в виде таблиц, равно числу элементов множества G. Обозначим множество этих таблиц через B. Тогда четвёрка элементов P = < X, Y, Z, B > называется вероятностным автоматом ( P –автоматом).
, где bkj – вероятность перехода автомата в состояние zk и появления на выходе сигнала yj, если он был в состоянии zs, и на его вход в этот момент времени поступил сигнал xi. Число таких распределений, представленных в виде таблиц, равно числу элементов множества G. Обозначим множество этих таблиц через B. Тогда четвёрка элементов P = < X, Y, Z, B > называется вероятностным автоматом ( P –автоматом). и
и  , где zk и qk – вероятности перехода P –автомата в состояние zk и появление выходного сигнала yk при условии, что P –автомат находился в состоянии zs и на его вход поступил входной сигнал xi.
, где zk и qk – вероятности перехода P –автомата в состояние zk и появление выходного сигнала yk при условии, что P –автомат находился в состоянии zs и на его вход поступил входной сигнал xi. , где si – вероятность появления выходного сигнала yi при условии, что P –автомат находился в состоянии zk.
, где si – вероятность появления выходного сигнала yi при условии, что P –автомат находился в состоянии zk.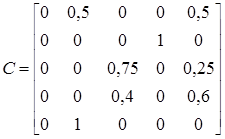 ;
;  . (2.11)
. (2.11)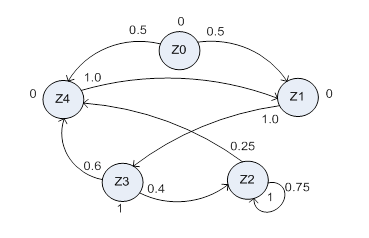
 ,
,  )
) .
.