|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основные принципы регулирования и управленияСтр 1 из 11Следующая ⇒
Конспект лекционных занятий Лекция 1. Основные понятия автоматики и введение в теорию автоматического управления. 1.1. Определения. Задачи дисциплины Существует несколько определений Автоматики. По одной из определений, приведенной в Российском энциклопедическом словаре под Автоматикой подразумевается область теоретических и прикладных знаний об автоматически действующих устройствах и системах, а также совокупность механизмов и устройств действующих автоматически. Целью предмета «Основы автоматики» является изучения принципов построения управляемых технических систем и устройств, выполняющих определенные целенаправленные функции без непосредственного участия человека.
Основные понятия автоматики Основным объектом автоматики является объект управления (ОУ). Под ОУ понимается техническое устройство, установка или процесс, подлежащие специально организованному воздействию для достижения поставленных целей. Эти преднамеренные воздействия называются управлением. Физические величины ОУ, которые целенаправленно изменяются или сохраняются неизменными в процессе управления, называются управляемыми величинами. Под воздействиями понимают факторы, изменяющие состояние объекта управления. Различают возмущающие и управляющие воздействия. Возмущающие воздействия (f) носят в основном случайный характер. Например, влияние температуры окружающей среды, давления, скорости воздуха, колебания напряжения в электросети на ОУ. Управляющие воздействия (u) на ОУ в соответствии с законом управления оказывают автоматические устройства управления (в дальнейшем называемые устройством управления – УУ). Сигналы обозначают совокупность энергии, материала или информации, поступающих в объект управления или выходящие из него, возмущающие и управляющие воздействия, а также регулируемые параметры. По направлению различают входные (u) и выходные(y) сигналы объекта управления. Так, возмущающие и управляющие воздействия будут входными сигналами для объекта управления; регулируемый же параметр всегда принимают за выходной сигнал, даже если он физически за пределы объекта не выходит (например, уровень жидкости в емкости, напряжение на обмотках электродвигателя). В общем случае сигналов может быть несколько, тогда они обозначаются векторами, а система назовется многопараметрической. На схеме (рис. 1.1) показано воздействие различных сигналов на ОУ.
Рис. 1.1 Объект управления
В состав автоматически управляемых объектов входит конструктивные и схемные элементы, каждый из которых имеет определенные свойства по преобразованию и передаче последующему элементу энергии и информации. Эти свойства элементов как преобразователей характеризуются оператором преобразования (ОП). С другой стороны каждый элемент рассматривается как звено системы, в которой осуществляется преобразование «вход-выход». Соединение элементов в определенную конфигурацию, обеспечивающую заданные характеристики образует систему управления (СУ), объединенную причинно-следственной связью. Функциональные схемы отражают функции (сравнение, преобразование, усиление и т.д.) выполняемые отдельными элементами системы. В функциональных схемах линии со стрелками указывают направление причинно-следственной связи функциональных составных элементов. В системе автоматического управления (САУ), управление осуществляется специальными техническими средствами без непосредственного участия человека. Если управляющее воздействие осуществляется оператором, то управление будет полуавтоматическим, а система в этом случае называется автоматизированной. На рис. 1.2. показана укрупненная функциональная схема САУ, содержащая характерные функциональные блоки: задающее устройство – ЗУ; сравнивающее устройство – СУ; преобразующее устройство – ПУ; корректирующее устройство – КУ; исполнительное устройство – ИУ; измерительную систему – ИС. Совокупность указанных устройств называются управляющим устройством –УУ.
Рис. 1.2. Функциональная схема САУ
Функциональные блоки САУ реализуются с помощью технических средств автоматики или приборов автоматики. Анализ и синтез САУ является основной задачей науки, называемой Теорией автоматического управления (ТАУ). Анализ САУ включает в себя выявление закономерностей изменения поведения системы в зависимости от характеристики элементов и причинно-следственной связи между ними, а также количественная оценка свойств поведения. Составной частью ТАУ является Теория автоматического регулирования (ТАР), в которой рассматриваются принципы автоматического регулирования технических процессов, методы исследования, расчета и проектирования систем автоматического регулирования (САР). В большинстве случаев по результатам анализа выполняется синтез САУ. При синтезе САУ осуществляется выбор элементов и причинно-следственных связей между ними так, чтобы получить требуемое поведение. Математические модели сАУ В ТАУ для описания и анализа взаимодействия всех элементов между собой удобно использовать математическую модель, которая применима ко всем элементам системы. В связи с этим принято следующее соглашение: каждый элемент САУ рассматривается как устройство – звено системы, в котором происходит преобразование входного воздействия на выходную реакцию т. е. преобразование «вход-выход», характеризующееся оператором преобразования (ОП); взаимодействие между звеньями задается описанием структуры системы. Единообразное описание всех элементов непрерывной системы в виде операторов преобразования может быть осуществлено с помощью дифференциальных уравнений. Дифференциальные уравнения, описывающие динамику любой физической системы, получают на основании фундаментальных физических законов. Этот метод в равной степени применим к механическим, электрическим, гидравлическим, термодинамическим системам. В программном продукте MATLAB имеются пакеты программ, основанные на аналитических зависимостях, которые позволяют моделировать и исследовать различные САУ. Студентам настоятельно рекомендуется все задачи параллельно решать с применением библиотеки Simulink из MATLAB. В общем случае для описания «вход-выход» любого элемента и САУ в целом может быть использованы линейные дифференциальные уравнения (ДУ) с постоянными коэффициентами:
Здесь Из теории дифференциальных уравнений известно, что общее решение дифференциального уравнения (2.1) определяется как сумма решений однородного ДУ (без правой части) и частного решения неоднородного ДУ (с правой частью). Искомые n-решения однородного ДУ определяются как
Общее решение однородного ДУ будет
где Сi – постоянные интегрирования, определяемые из начальных условий. Частное решение неоднородного ДУ обычно отыскивается в том виде, в каком дана правая часть уравнения (2.1) и зависит от вида функции u(t) на входе системы. Введем оператор дифференцирования по времени
Тогда выражение (2.1) запишется в операторной форме
или сокращенно в виде
A(p)y(t) = B(p)u(t), (2.2)
Где Помимо операторной формы записи в виде (2.2) в качестве математической модели используется операторная передаточная функция. При этом отношение выходной величины к входной величине, называемое операторной передаточной функцией системы определяется из (2.2) как
Таким образом, чтобы изучить свойство сложной системы и управлять ей необходимо составить математическую модель, чаще в виде дифференциальных уравнений с постоянными коэффициентами.
Оценка статических свойств В зависимости от процессов, происходящих в САУ различают два режима функционирования работы САУ и их элементов: динамический и статический. Переходному процессу соответствует динамический режим функционирования САУ и их элементов. Этому режиму в ТАУ уделяется наибольшее время. В динамическом режиме величины, определяющие состояние САУ и их элементов изменяется во времени. Выше были представлены математические модели САУ в динамическом режиме в виде дифференциальных уравнений n-го (2.1) или в виде уравнений состояния (3.2, 3.3). Наоборот, установившийся процесс в САУ соответствует статическему режиму функционирования, при котором величины, характеризующие состояние САУ не изменяются во времени. Для оценки САУ в статическом (установившемся) режиме используется показатель называемый точностью управления. Этот показатель определяется по статической характеристике САУ.
Рис. 4.1. Статические характеристики статических и астатических систем
Статическая характеристика САУ представляет зависимость установившегося значения выходного параметра – y0 от входного параметра – u0 при постоянном возмущении или же зависимость выходного параметра - y0 в установившемся режиме от возмущения–f при постоянном входном параметре. Уравнения статики САУ имеют вид Статические свойства системы оцениваются абсолютным значением статической ошибки и относительной статической ошибкой, называемой статизмом. Абсолютное значение статической ошибки (Рис. 4.1, а)
где
В этом случае максимальное значение статической ошибки
Относительная статическая ошибка, или статизм, системы равен
Также, статизм можно характеризовать коэффициентом статизма Эффективность статического регулирования САУ в установившемся режиме оценивают по так называемой степени точности управления, равной отношению абсолютной статической ошибки неавтоматизированного объекта управления (без регулятора) к абсолютной статической ошибке автоматической системы. В некоторых случаях статическая ошибка нежелательна, тогда переходят к астатическому регулированию или вводят компенсирующие воздействия на возмущения. Усилительное звено Оператор преобразования усилительного звена (УЗ) равен коэффициенту передачи k. Уравнение динамики имеет вид
После преобразования по Лапласу получим
Y(s) = kU(s).
Тогда передаточная функция усилительного звена равна постоянной величине
Это звено называется безинерционным.
Рис. 5.1. Качественные характеристики УЗ
Примером такого звена является механический редуктор (k –соответствует передаточному отношению), широкополосный усилитель (k- соответствует коэффициенту усиления), делитель напряжения и т.п. Многие датчики сигналов, такие как потенциометрические датчики, индукционные датчики, вращающиеся трансформаторы могут рассматриваться как безинерционные звенья. Амплитудно-фазо-частотная характеристика W(jw) =k вырождается в точку, расположенную на вещественной оси на расстоянии Амплитудно-частотная характеристика Фазо-частотная характеристика Переходная характеристика (Рис. 5.1, г) УЗ представляет собой ступенчатую функцию, т.е. при Безинерционное звено является некоторой идеализацией реальных звеньев. В действительности ни одно звено не в состоянии равномерно пропускать все частоты от 0 до
Колебательное звено Колебательным звеном может быть представлен элемент САУ, включающий не один, а два энергетические или массовые ёмкости. Например, в одной ёмкости накапливается потенциальная энергия, а в другой – кинетическая. Канал, по которой обмениваются энергией, обладает некоторым сопротивлением и на нем происходит потеря энергии. Мерой потери энергии является коэффициент затухания При
После преобразования по Лапласу получим
Корни характеристического уравнения Уравнение (5.13) обычно представляется в виде
где
Передаточная функция колебательного звена имеет вид
Примерами колебательного может быть виброзащитная система (демпфер), RLC-цепи, управляемые двигатели постоянного тока (при определенных условиях), упругие механические передачи, гироскопические устройства. Корни характеристического уравнения для ДУ (5.12) будут при
Вещественная часть корня Переходная характеристика колебательного звена описывается следующим уравнением:
где График переходной характеристики носит колебательный характер и представлен на рис. 5.7. Импульсная переходная характеристика колебательного звена описывается следующим уравнением:
где
Рис. 5.7. Переходная характеристика колебательного звена
График импульсной переходной характеристики носит колебательный характер и представлен на рис. 5.8.
Рис. 5.8. Импульсная переходная характеристика колебательного звена
График амплитудной фазовой частотной характеристики колебательного звена показан на рис. 5.9. Амплитудная частотная характеристика (Рис. 5.10) может иметь резонансный пик и описывается уравнением вида
Рис. 5.9. График АФЧХ колебательного звена
Исследование модуля частотной передаточной функции на максимум показывает, что пик будет существовать при
Максимум амплитудной частотной характеристики соответствует частоте
Рис. 5.10. График АЧХ колебательного звена
Фазовая частотная характеристика колебательного звена (Рис. 5.11) описывается уравнением вида
Рис. 5.11. ФЧХ колебательного звена
Логарифмическая амплитудная частотная характеристика строится по выражению
и имеет вид представленный на рис. 5.12.
Рис. 5.12. График ЛАЧХ колебательного звена
Снижение параметра затухания В идеальном случае В том случае, когда
из которого следует, что апериодическое звено второго порядка можно представить как последовательно соединенные два апериодических звена первого порядка.
Коррекция линейных САУ Коррекция САУ производится введением корректирующего звена для обеспечения требуемого качества управления. Существуют различные виды коррекции: 1. Последовательная коррекция Пусть желаемая (после коррекции) передаточная функция задана и равна W*(s). Неизменяемая часть САУ имеет передаточную функцию WС (s). Определим: какую передаточную функцию должно иметь корректирующее звено, если мы его соединим последовательно к заданному звену с ПФ WС (s). Воспользуемся равенством 6.5, считая, что ПФ эквивалентного звена известна и равна W*(s), получим ПФ последовательно соединенного корректирующего звена с помощью зависимости
2. Параллельная коррекция В отличие от приведенного теперь соединим корректирующее звено параллельно к заданному звену. Теперь воспользуемся равенством (6.7). Так же как и в предыдущем случае считаем, что ПФ эквивалентного звена задана, и равна W*(s). Тогда ПФ корректирующего звена будет равна WK(s)= W*(s)- WС (s). 3.Коррекция с помощью обратной связи При данном виде коррекции корректирующее звено может быть соединено двояко; во-первых, оно включается непосредственно в цепь обратной связи (рис. 6.7); во-вторых, оно может быть соединено последовательно с заданным звеном при единичной обратной связи (рис. 8.3).
Рис.8.3. Схема коррекции с единичной обратной связью
В первом случае ПФ корректирующего звена определяется с помощью выражения (6.7), имеем
Во втором случае после простых преобразований получим ПФ корректирующего звена в виде
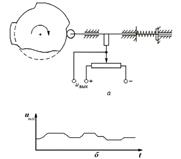
Разновидностью коррекции с помощью обратной связи является система подчиненного регулирования. Отличие системы подчиненного регулирования в том, что она является многоконтурной, содержащей последовательно подчиненные замкнуты контуры, из которых последняя образует главную обратную связь. Преимущества такой системы в том, что предоставляется возможность синтеза параметров каждого контура по отдельности, начиная с внутреннего. Задающие устройства Задающее устройство (ЗУ) предназначено для ввода в САУ задающего воздействия, содержащего информацию о том, как дальше должен управляться обьект управления. В замкнутых системах управления ЗУ вводит заданное значение регулируемой координаты. В САУ с логическими программами ЗУ вводит эту программу. В системах автоматического регулирования ЗУ содержит информацию о регулируемом параметре в дискретной или аналоговой форме. Конструкция задающего устройства зависит от его конкретного назначения. Например, для ввода в систему автоматического регулирования стабилизированного напряжения может использоваться потенциометр. В простейшем потенциометре входной величиной является перемещение, а выходной – напряжение (ток), которое зависит от перемещения движка. В автоматических системах с программным управление в качестве ЗУ используются командоаппараты непрерывного или дискретного действия. Например, на рис. 9.2 показана схема командоаппарата непрерывного действия
Рис. 9.2. Командоаппарат непрерывного действия
Такое ЗУ может использоваться лишь в САУ без обратной связи, т. к. сигналы на выходе ЗУ не зависят от фактического выполнения команд, они повторяются по заранее заданному циклу. Такие командоаппараты имеют СУ некоторые стиральные машины. Функции ЗУ может выполнять контактные и бесконтактные системы основанные на реле или электронных ключах. В этом случае ЗУ выполняет функцию автоматического включения или отключения программно управляемой системы.
Устройство сравнения Устройства сравнения (УС) выполняют функцию сравнения сигналов. Так, например в САУ с обратной связью к одному из входов УС поступает сигнал от датчика, а к другому от ЗУ (задатчика) заданное значение сигнала. В зависимости от разницы формируются сигналы для управления. В электрических схемах в качестве УС используются переменные резисторы, потенциометры, электронные устройства. Пусть заданное значение управляемой величины g. Этот сигнал контролируется датчиком, который в данный момент выдает значение у. На УС получается сигнал рассогласования
Предположим, что в системе управления к выходу УС присоединен исполнительный механизм. При l = 0 система находится в равновесии, а при В качестве УС часто используется мостовая схема, приведенная на рис. 9.3.
Рис. 9.3. Мостовая схема УС
Рассогласование с применением мостовой схемы определяется выражением
УС может быть построена на базе операционного усилителя. Усилители Усилитель (У) предназначен для усиления входного сигнала. В некоторых случаях с помощью У получают заданную зависимость между входным и выходным сигналом. Следует отметить, что в усилителях сигналы на входе и выходе имеют одну и ту же физическую природу. Усиление или преобразование энергии в У осуществляется за счет энергии источника питания усилителя. Основными характеристиками У являются: коэффициент усиления; линейность статической характристики; быстродействие; уровень собственных шумов; максимальная выходная мощность. В САУ применяются следующие типы усилителей: полупровдниковые, магнитные, электромашинные, гидравлические, пневматические и др. В измерительной технике широко применяются полупроводниковые У, которые имеют высокий коэффициент усиления, низкий уровень шумов, большое быстродействие. Вместе с тем эти У имеют низкую выходную мощность. Полупроводниковые усилители достаточно подробно рассматриваются в курсе Электроники. Здесь в качестве примера рассмотрим усилитель на биполярном транзисторе, схема которого приведена на рис. 9.4. Здесь сопротивления R1, R2 обеспечивают равновесие в каскаде. При этом в транзисторе протекают токи покоя базы Iб.п., коллектора Iк.п., эммитера Iэ.п., также имеются соответствующие напряжения Uбп, Uкп, Uэп. Емкости С1, С2 выполняют разделительные функции. Емкость С1 препятствуют протеканию тока с делителя R1, R2. Емкость С2 препятствует прохождению напряжения на сопротивление нагрузки Rн. Сопротивление Rэ определяет ток покоя через транзистор при заданном напряжении Uбп. Так, в случае роста температуры коллектора ток Iк.п. и Iэ.п возрастают, при этом возрастает и падение напряжения на эмиттере Uэп = Iэп Rэп. Ввиду того, что напряжение на базе фиксировано, то происходит закрывание транзистора, что приводит к автоматической балансировке режима покоя в работы транзистора.
Рис. 9.4. Схема усилителя на биполярном транзисторе
Переменный ток эмиттера создает переменное напряжение Uэ = Iэ Rэ, которое уменьшает усиливаемое напряжение. Коэффициент усиления каскада (из одного У) равен
К = Rк / Rэ. Для определения параметров выходного сигнала в динамическом режиме сопротивление нагрузки Rн подключается параллельно сопротивлению Rк. Тогда общее сопротивление в цепи коллектора равно
Рис. 9.5 Схема магнитного усилителя
Рассмотрим пример магнитного усилителя. Магнитный усилитель (МУ) представляет многообмоточный дроссель с железным сердечником. Принцип действия МУ связан с тем, что при подмагничивании сердечника магнитным полем постоянного тока происходит изменение индуктивности обмоток переменного тока. На рис. 7.6 представлена схема однотактного магнитного усилителя. Этот МУ имеет одну двухсекционную обмотку переменного тока При подаче тока на эту обмотку рабочая точка сдвигается вправо на середину линейной характеристики. В этом случае при МУ приобретает свойство чувствительности к полярности управляющего тока. При отсутствии тока в нулевой обмотке МУ нечувствителен к изменению полярности, а характеристики усилителя симметричны относительно оси ординат. В автоматических системах управления с гидравлическими элементами применяются гидроусилители. Принцип действия простого гидроусилителя показан на рис. 7.7. Благодаря свойству усиления малому входному усилию соответствует высокое выходное усилие на штоке. В качестве примера рассмотрим расчетную схему гидросистемы, состоящей из гидронасоса и гидродвигателя поступательного движения, гидроцилиндры которых соединены друг с другом короткой магистралью (рис.7.7).
Рис. 9.6. Схема гидроусилителя
Если на шток гидронасоса (ГН) с площадью поршня АН действует сила РН, то в жидкости возникает давление рН = РН/ АН, которое действует на поршень гидродвигателя (ГД) площадью АД и вызывает на штоке силу, которая уравновешивает силу РД =
Из этого выражения следует мультипликационный эффект ГП, характеризуемый коэффициентом мультипликации. Коэффициент мультипликации равен отношению силы на выходном звене к силе на входном звене
Гидро- и пневматические ИП В зависимости от того, какая рабочая среда (газ или жидкость) используется для исполнительного двигателя, различают соответственно пневматические и гидравлические исполнительные приводы. От способа использования энергии газа или жидкости гидро-пневматические исполнительные приводы разделяются на обьемные и динамические. Принцип действия объемного привода основан на том, что газ или жидкость под давлением изменяют объем камер двигателя, в результате чего выполняется перемещение рабочего органа двигателя – поршня гидро-пневмоцилиндров или лопастей гидродвигателя вращательного движения. Гидро-пневмоприводы, принцип действия которых основан на динамическом воздействии потока жидкости или газа называются гидро- пневмодинамическими приводами. В дальнейшем рассматриваются в основном обьемные гидро-пневмоприводы. В гидро-пневматических ИП источником, аккумулирующим механическую энергию являются гидро- пневмодвигатели линейного и вращательного движения. Областью применения электропневматических ИП является промышленная робототехника, приводы с небольшими требованиями по точности, а также приводы двухпозиционных механизмов (клапаны, захваты) и простейшие производственные автоматы. В состав пневматических ИП могут входить для непосредственного исполнения механического движения: пневмоцилиндры одностороннего и двухстороннего действия, неполноповоротные пневмодвигатели, пневмомоторы, мембранные камеры и др. В качестве вспомогательных устройств для управления и функционирования двигателей входят: распределительная аппаратура, различные пневмоклапаны, пневмодроссели, индикаторы и реле давления, аппаратура для подготовки воздуха и другие. Для управления пневматическим ИП может использоваться модуль микропроцессорного управления, а также система управления, основанная на струйной автоматике. На рис. 10.2 представлена схема, показывающая принцип действия пневматического ММД. Положение штока пневмоцилиндра измеряется потенциометром (П), сигнал от которого подается к сервоусилителю (СУ) питающемуся от источника питания (И). Сервоусилитель подает сигналы на сервораспределитель (СР), управляющий подачей воздуха в пневмоцилиндр. Основными достоинствами пневматических ИП является: § быстродействие; § возможность управления силой на выходе; § простота конструкций, не требующая дополнительных механических передач; § простота в эксплуатации; § пожаро- и взрывобезопасность; § возможность применения струйной автоматики.
Рис 10.2. Схема гидро- пневматического ИП Однако существуют причины, ограничивающие применение пневматических ИП. Пневматические ИП имеют ряд существенных недостатков и главное из них то, что из-за сжимаемости воздуха нельзя получить движение и позиционирование с заданной точностью. Кроме того, пневматические МИП имеют низкую выходную мощность на выходе, что обусловлено низким рабочим давлением, не могут обеспечить плавности движения, требуют наличия устройства для подготовки воздуха. Тем не менее, в будущем, возможно, могут быть созданы устройства и элементы пневмоавтоматики для расширения области применения пневматических ИП. Электрогидравличесие ИП имеют следующие достоинства: § высокая энергоемкость; § быстродействие; § простота конструкции и возможность применения агрегатно-модульного принципа при конструировании и сборке; § жесткость статических нагрузочных характеристик из-за свойства малой сжимаемости рабочей жидкости; § не требуются механические преобразователи движения, снижающие к.п.д. системы. Однако электрогидравличесие ИП имеют ряд существенных недостатков, а именно: § требуют применения специальных источников, из которых должна поступать рабочая жидкость (насосная станция, гидрорезервуары); § свойства жидкости (вязкость) зависят от температуры. Так, например, при работе ИП жидкость нагревается и её свойства изменяется, что влияет на динамические характеристики системы в целом; |
Последнее изменение этой страницы: 2017-05-06; Просмотров: 591; Нарушение авторского права страницы
 . (2.1)
. (2.1) , также
, также  – постоянные величины, называемые параметрами звена. Число n называется порядком уравнения. В линейных дифференциальных уравнениях переменные и их производные входят линейно, т. е. в первой степени и без их произведений. Следует отметить, что если на систему действуют несколько входных и выходных воздействий, то для каждой пары входных и выходных воздействий составляется уравнение вида (2.1).
– постоянные величины, называемые параметрами звена. Число n называется порядком уравнения. В линейных дифференциальных уравнениях переменные и их производные входят линейно, т. е. в первой степени и без их произведений. Следует отметить, что если на систему действуют несколько входных и выходных воздействий, то для каждой пары входных и выходных воздействий составляется уравнение вида (2.1). (i=1, …, n)…корней характеристического уравнения
(i=1, …, n)…корней характеристического уравнения =0.
=0. ,
,  .
.

 – операторные многочлены.
– операторные многочлены. (2.3)
(2.3)
 или
или  . В общем случае уравнения могут быть нелинейным. Рассмотрим статическую характеристику элементов или САУ в целом (рис. 4.1) построенную по второму уравнению. Если установившееся значение ошибки в системе зависит от установившегося значения возмущения f, то система называется статической (Рис.4.1, а), а если не зависит — то астатической (Рис.4.1, б).
. В общем случае уравнения могут быть нелинейным. Рассмотрим статическую характеристику элементов или САУ в целом (рис. 4.1) построенную по второму уравнению. Если установившееся значение ошибки в системе зависит от установившегося значения возмущения f, то система называется статической (Рис.4.1, а), а если не зависит — то астатической (Рис.4.1, б). ,
,  — установившееся значение выходного параметра при i значении возмущения
— установившееся значение выходного параметра при i значении возмущения  ;
;  — номинальное значение выходного параметра в статическом режиме при номинальной нагрузке
— номинальное значение выходного параметра в статическом режиме при номинальной нагрузке  . При этом номинальное значение выходного параметра определяется как среднеарифметическое от максимального y01 и минимального y02 текущего значения выходного параметра
. При этом номинальное значение выходного параметра определяется как среднеарифметическое от максимального y01 и минимального y02 текущего значения выходного параметра .
.
 , равным тангенсу угла наклона статической характеристики
, равным тангенсу угла наклона статической характеристики  (Рис. 3.1, а).
(Рис. 3.1, а). . (5.1)
. (5.1) .
.
 от начала координат (Рис.5.1, а).
от начала координат (Рис.5.1, а). (Рис. 5.1, б), постоянна на всех частотах.
(Рис. 5.1, б), постоянна на всех частотах. (Рис. 5.1, в).
(Рис. 5.1, в). ,
,  .
. .
. . Причем чем больше
. Причем чем больше  переходной процесс будет колебательным и звено будет называться колебательным. Колебательное звено описывается дифференциальным уравнением вида
переходной процесс будет колебательным и звено будет называться колебательным. Колебательное звено описывается дифференциальным уравнением вида (x> 1 ). (5.12)
(x> 1 ). (5.12)
 (5.13)
(5.13) должны быть комплексными, что будет выполняться при условии
должны быть комплексными, что будет выполняться при условии  .
. , (5.14)
, (5.14) – угловая частота свободных колебаний (при отсутствии затухания),
– угловая частота свободных колебаний (при отсутствии затухания),  . (5.15)
. (5.15) . (5.16)
. (5.16) представляет собой коэффициент затухания переходного процесса, а
представляет собой коэффициент затухания переходного процесса, а  – частоту затухающих колебаний.
– частоту затухающих колебаний. ,
,  ;
;  ;
;  ; А1, А2 – максимальные амплитуды колебаний относительно его установившегося значения, отстоящие друг от друга на время, равное полупериоду колебаний.
; А1, А2 – максимальные амплитуды колебаний относительно его установившегося значения, отстоящие друг от друга на время, равное полупериоду колебаний. ,
,  ;
;  ;
;  .
.
 .
.
 . Высота пика будет тем больше, чем меньше параметр затухания:
. Высота пика будет тем больше, чем меньше параметр затухания:  .
. .
.
 .
.
 ,
, 
 , то потери энергии будут настолько велики, что переходной процесс не будет колебательным.
, то потери энергии будут настолько велики, что переходной процесс не будет колебательным.  , (5.17)
, (5.17) .
.
 .
. .
.
 . (9.1)
. (9.1) включается механизм.
включается механизм.
 . (9.2)
. (9.2)
 . (9.3)
. (9.3)
 . Последовательно к этой обмотке подключена нагрузка усилителя Rн. На среднем стержне имеются 3 обмотки: управляющая (wупр), обратной связи (wос) и нулевая (w0). По управляющей цепи подается входной сигнал в виде постоянного тока iупр. Обмотка обратной связи питается через выпрямитель выходным напряжением МУ. При этом положительная обратная связь увеличивает крутизну статической характеристики и инерцию усилителя. И, наоборот уменьшает эти параметры при отрицательной обратной связи. Роль обратной связи важна в связи с тем, что быстродействие МУ сравнительно низкое. Нулевая обмотка питается от независимого источника питания и служит для сдвига рабочей точки усилителя на линейный участок.
. Последовательно к этой обмотке подключена нагрузка усилителя Rн. На среднем стержне имеются 3 обмотки: управляющая (wупр), обратной связи (wос) и нулевая (w0). По управляющей цепи подается входной сигнал в виде постоянного тока iупр. Обмотка обратной связи питается через выпрямитель выходным напряжением МУ. При этом положительная обратная связь увеличивает крутизну статической характеристики и инерцию усилителя. И, наоборот уменьшает эти параметры при отрицательной обратной связи. Роль обратной связи важна в связи с тем, что быстродействие МУ сравнительно низкое. Нулевая обмотка питается от независимого источника питания и служит для сдвига рабочей точки усилителя на линейный участок.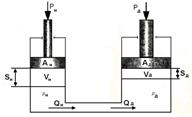
 в том случае, когда система находится в равновесии и без учета потерь на трение и потери давления в магистрали
в том случае, когда система находится в равновесии и без учета потерь на трение и потери давления в магистрали  . Отсюда следует, что
. Отсюда следует, что .
. .
.