
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Justification of the scheme of arrangement of paws on a frame ⇐ ПредыдущаяСтр 3 из 3
Arrangement of paws on a frame of a cultivator is defined by three parameters: ∆ в if it is required by overlapping size on the cultivation purposes, quantity of rows of paws and distance of l between ranks. Figure 10. To justification of placement of paws of a cultivator. Opredelenim a zone of deformations of the soil when moving a paw in the soil, immersed on processing depth – amax (fig. 10). Before a paw the area of deformation will be limited to the direct mn located at an angle φ to nN normal paw which is carried out through a sock n. From lateral faces the area of deformation is limited to the planes making with the mn direction a corner ω /2. On the surfaces of the soil width In strips of deformation will be determined by these data by size
где
Having carried out substitution, we receive
In these calculations it is necessary to accept amax=120mm, φ =47, 70, ω ≈ 50 Then we have Впер1=200+(2*120* tg25/cos 54, 3)=391, 7 мм Впер2=260+(2*120* tg25/cos 54, 3)=451, 7 мм Взад1=313, 14+(2*120* tg25/cos 63, 5)=464, 08 мм Взад2=390, 22+(2*120* tg25/cos 63, 5)=641, 03 мм
Considering that overlapping ∆ в is defined earlier, here it is necessary to calculate distance between the next furrows we will determine by a formula:
We receive, с=0, 5(200+260)-30=200мм с=0, 5(260+330)-50=249мм
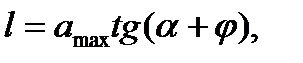
We determine overlapping of flexing areas by a formula: We receive ∆ В=0, 5(392+464)-200=228 мм ∆ В=0, 5(452+641)-245=271мм L distances, between ranks of paws of a cultivator, it is defined from a condition of the free exit of the advancing crack in the processed layer on the surface of the soil without hindrances from ahead the standing paws, In this case the probability of driving in of actions by the soil and weeds considerably decreases. This condition is satisfied at
Having substituted a formula (18) in a formula (17) finally we will receive
Having carried out substitution and calculations we receive l0= l1*cos α =163*0, 983=161, 859 мм l=120* tg(15, 3+47, 7)=235, 5мм, then L≥ 235+162=397 мм enters limits L=370…560 means truth Calculation of the common traction resistance of a cultivator This calculation begins with determination of forces operating on paws forward and back rows according to their width of capture by depth of processing and type of the soil. In a general view the traction resistance of one paw is calculated on q specific resistance, and capture width in
where q - a specific resistance of the soil, N/mm; in - width of capture of a paw, mm. Specific traction resistance of lancet paws with a width of capture of domestic cultivators by the 240-300th at traveling speed of 10 km/h is specified in tab. 1. tab. 1. Specific resistance of lancet cultivator paws
At increase in traveling speed of a cultivator by 1 km/h (over 10 km/h) resistance of paws increases by 10% Рисунок 11.Схема действия силы Rxz сопротивления почвы на лапу.
We accept q=3, 8 of N/mm as depth preseeding processing makes - 12 cm. We choose capture width maximal in =300 mm. However resistance of paws of a forward row exceeds resistance of paws of a back row (with the same width of capture) approximately twice. It needs to be considered when determining traction resistance of a separate paw
Then the traction resistance of paws is determined by analogy on a formula:
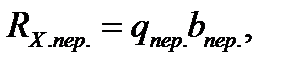
Besides traction resistance, the paw is affected still by vertical resisting strength of the soil of Rz. (fig. 8). m=tgΨ coefficient characterizing the relation of size of the vertical paw of Rz composing resistance to horizontal Rx depending on sharpness of an edge, hardness of the soil and depth of processing can change over a wide range and have both positive, and negative value. The negative value of a corner Ψ appears at solid dry soils and the blunt edge. The direction of net force Rxz is defined by a corner Ψ and depends on the angle of dyeing β and a sliding angle φ: As the angle of dyeing β from paw parameters, and a sliding angle φ – from properties and a condition of the soil, and a corner Ψ will be depends on them. With a depth of course of 10 - 12 cm that corresponds to average humidity of the soil and a fine edge Ψ = 22-280. We accept Ψ = 31.
We calculate traction resistance for a forward number of a cultivator of Rxz a per:
We calculate traction resistance for the second and third ranks of a cultivator of Rxz the back:
The provision of a cross point of a force direction Rxz is characterized by the size h which depends on processing depth: We calculate Rxz point of application: The common traction resistance of a cultivator is calculated by a formula: Р= Rхz пер*n+ Rхz зад*n+ Rхz зад*n (26) where n-the number of paws among As on the first row the number of paws of n = 5 pieces, On the second row - n = 5 pieces, On the third - n = 4 pieces, that common traction resistance will be: Р= 1087*5+609*5+609*4= 11526 Н We accept a traction class of the tractor of 30 kN. In that specific case we will take the tractor of the T-150K brand. 6 Design calculations. |
Последнее изменение этой страницы: 2017-05-11; Просмотров: 218; Нарушение авторского права страницы



 , (14)
, (14) , (15)
, (15) . (16)
. (16) (17)
(17) (18)
(18) (19)
(19) (20)
(20)
 (21)
(21) (22)
(22) (23)
(23) (24)
(24)




 (25)
(25)