|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методические указания к заданию 2Стр 1 из 4Следующая ⇒
1.3.1 Содержание задания 2 Для однопролетной шарнирно-опорной по обоим концам балки требуется: § определить опорные реакции; § построить эпюры изгибающих моментов; § найти экстремальные значения изгибающих моментов. 1.3.2 Варианты задания Геометрические размеры и действующие на балки нагрузки приведены в Приложении Б. Для расчета необходимо взять одну балку в соответствии с номером варианта – N (по последней цифре номера зачетной книжки). Схема нагружения балки приведена на рисунке 1.
Рисунок 1 - Схема нагружения балки Элементы теории к заданию 2 Для вычисления нагружения балки применяем метод суперпозиции, означающий, что для каждого сечения балки вычисляем изгибающие моменты отдельно от каждой нагрузки, а затем производим суммирование полученных значений. Ниже приведены формулы вычисления опорных реакций и изгибающих моментов в каждом сечении балки отдельно от действия сосредоточенной силы, равномерно распределенной нагрузки и сосредоточенного момента. 1.3.3.1 Действие сосредоточенной силы На рисунке 2 представлена схема нагружения балки от действия сосредоточенной силы Р.
Рисунок 2 - Действие сосредоточенной силы
Bp(l-x) для xÎ [lp; l] где А Р – реакция опоры в точке А; В Р – реакция опоры в точке В; Σ y P – сумма проекций всех сил на ось y; Mp(x) – изгибающий момент от действующих сил. Действие равномерно распределенной нагрузки На рисунке 3 представлена схема нагружения балки от действия равномерно распределенной нагрузки.
Рисунок 3 - Действие равномерно распределенной нагрузки
Aqx для xÎ [0; l1) Mq(x)= Bq(l-x) для xÎ [l1+l2; l]
где А q – реакция опоры в точке А; В q – реакция опоры в точке В; Σ y q – сумма проекций всех сил на ось y; Mq(x) – изгибающий момент от действующих сил. Действие сосредоточенного момента
Bm(l-x) для xÎ [lm; l] где А m – реакция опоры в точке А; В m – реакция опоры в точке В; Σ y m – сумма проекций всех сил на ось y; Mm(x) – изгибающий момент от действующих сил. На рисунке 4 представлена схема нагружения балки от сосредоточенного момента.
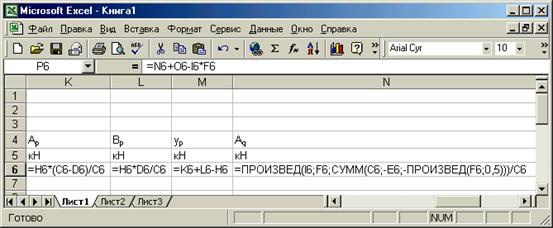
Рисунок 4 - Действие сосредоточенного момента Определение суммарного изгибающего момента Определение суммарного изгибающего момента производим по формуле M(x)=Mp(x)+Mq(x)+Mm(x). 1.3.4 Порядок выполнения задания Пример выполнения и оформления задания показан на рисунке 7 (для наглядности большая часть строк скрыта). § В ячейки C4: J4 вводим исходные геометрические размеры и действующие на балки нагрузки. В ячейках K4: S4 для каждого вида нагрузки вычисляем опорные реакции и проверяем правильность их определения (сумма проекций всех сил должна быть равна 0) (пример на рисунке 5).
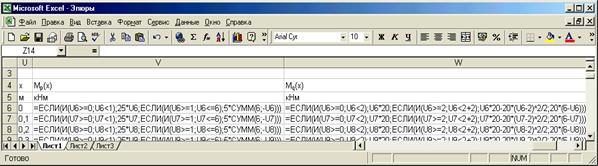
Рисунок 5 - Пример расчета реакций опор § В столбец U вводим значения x с шагом 0, 01м. § В столбцах V: X для каждого значения x вычисляем изгибающие моменты отдельно от действия каждой из приложенных нагрузок. Следует помнить, что на разных интервалах x мы используем различные формулы для определения изгибающих моментов. § В столбце Y для каждого значения х вычисляем изгибающие моменты от суммарного действия всех нагрузок. § Используя функции МАКС и МИН, вычисляем экстремальные значения суммарных изгибающих моментов. По полученным данным строим диаграмму (эпюру) зависимости изгибающего суммарного момента от значения х – рисунок 7. Рисунок 6 - Пример расчета изгибающих моментов Рисунок 7 – Пример построения эпюры Методические указания к заданию 3 1.4.1 Содержание задания 3 Решить систему линейных алгебраических уравнений, используя возможности Excel. 1.4.2 Варианты задания Варианты задания приведены в Приложении В. Номер задания выбрать по последней цифре номера зачетной книжки Элементы теории к заданию 3 Основная запись системы линейных алгебраических уравнений
a21x1+a22x2+...+a2jxj+...+a2nxn=b2 ......................................... ai1x1+ai2x2+...+aijxj+...+ainxn=bi ......................................... an1x1+an2x2+...+anjxj+...+annxn=bn Матричная формулировка имеет вид Ах = b, где
a21 a22... a2j... a2n x2 b2
ai1 ai2... aij... ain xi bi ........................ an1 an2... anj... ann xn bn
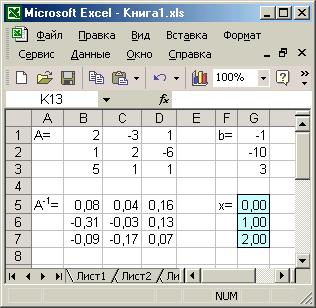
Решение системы уравнений в матричной формулировке х = А-1 b, где А-1 — матрица, обратная к матрице А. Для вычисления обратной матрицы следует воспользоваться функцией " МОБР", а для умножения матрицы А-1 на вектор b – функцией " МУМНОЖ". Для получения результатов с использованием этих функций необходимо предварительно выделить массив нужного размера. Для запуска этих функций следует пользоваться только комбинацией клавиш {Ctrl+Shift+Enter}, но не кнопкой ОК. 1.4.4 Пример выполнения задания 3 Условие: исходная система уравнений
x1 + 2x2 – 6x3 = -10 5x1 + x2 + x3 = 3 Решение (рисунок 8): • В ячейки В1: D3 ввести матрицу А. • В ячейки G1: G3 ввести вектор b. • Выделить ячейки B5: D7. Для вычисления обратной матрицы А-1 следует воспользоваться математической функцией " МОБР" • Выделить ячейки G5: G7. Для вычисления х = A-1b следует воспользоваться математической функцией " МУМНОЖ". Ответ: x1=0, 00; x2=1, 00; х3=2, 00 (рисунок 8).
Рисунок 8 - Решение системы линейных алгебраических уравнений |
Последнее изменение этой страницы: 2017-05-11; Просмотров: 173; Нарушение авторского права страницы


 Apx для xÎ [0; lp)
Apx для xÎ [0; lp)
 ,
,  , å yp=AP+Bp-P=0, Mp(x)=,
, å yp=AP+Bp-P=0, Mp(x)=, 

 ,
,  , å yq=Aq+Bq-ql2=0.
, å yq=Aq+Bq-ql2=0. для xÎ [l1; l1+l2),
для xÎ [l1; l1+l2),  Amx для xÎ [0; lm)
Amx для xÎ [0; lm) ,
,  , å ym=Am+Bm=0, Mm(x)=,
, å ym=Am+Bm=0, Mm(x)=, 

 a11x1+a12x2+...+a1jxj+...+a1nxn=b1
a11x1+a12x2+...+a1jxj+...+a1nxn=b1



 2x1 - 3x2 + x3 = -1
2x1 - 3x2 + x3 = -1