
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Траектория трала в горизонтальной плоскости после поворота судна
Знание траектории трала в горизонтальной плоскости после поворота судна (положения трала относительно судна в тот или иной момент времени после поворота) необходимо для решения следующих задач: - наведения разноглубинного трала на локальные, в особенности быстроподвижные, косяки пелагических рыб; - выбора маневра курсом судна для уклонения донного трала от подводных опасностей, обнаруженных эхолотом (вертикальным трактом ГАС); - расхождения судов при совместном траловом промысле, обеспечивающего не только безопасность самих судов, но и буксируемых ими тралов. Определить точную траекторию трала очень трудно, так как она зависит от многих факторов: траектории судна, длины ваеров, конструкции трала, траловых досок и т. п. Кроме того, гидродинамические характеристики любого трала изменяются с течением времени. Рассмотрим приближенное решение этой задачи, удовлетворяющее практическим требованиям промысловой навигации. Предположим, что судно после быстрого поворота движется по прямой линии, а система трал-доски представляет собой материальную точку с массой и гидродинамическим сопротивлением, соответствующими реальным тралу-доскам. Так как прогиб ваеров в плоскости горизонта сравнительно мал, заменим их в расчетах гибкими стержнями. Экспериментально установлено, что при изменении курса судна на углы до 60° горизонт хода разноглубинного трала изменяется незначительно, поэтому будем считать горизонт хода такого трала при маневрировании курсом неизменным. При принятых допущениях дифференциальное уравнение вращения трала относительно точки подвеса ваеров С (рис. 2 ) может быть записано в таком виде:
где I - момент инерции системы трал - доски - ваера относительно точки подвеса ваеров С; Мт - момент суммарной силы сопротивления трала и досок Rт относительно точки подвеса ваеров С; Мв - момент от гидродинамических сил сопротивления ваеров.
Рисунок 2 Взаимодействие трала и судна Если выразить Мт и Мв через скорость судна V, то получается сложное нелинейное дифференциальное уравнение второго порядка. Анализ численного решения этого дифференциального уравнения на ЭЦВМ, выполненный А. М. Ивановым и В. В. Козловым, показал, что интегральные кривые с достаточной степенью точности можно апроксимировать семейством кривых, уравнения которых в относительной полярной системе координат имеют вид:
где
где φо—значение угла φ в начальный момент после поворота; е — основание натуральных логарифмов; µ — параметр семейства кривых; S — расстояние, пройденное судном после поворота; L — горизонтальное отстояние трала от судна ( L = СТ), равное проекции на плоскость горизонта расстояния между точкой подвеса ваеров и серединой устья трала*. Обозначим курсовой угол судна на трал через qT, а величину изменения курса судна через ΔK. Тогда, учитывая, что при отсутствии дрейфа qT = π – φ, a ΔK. = φ0, уравнение ( 1.3 ) можно переписать так:
Параметр µ является функцией безразмерного коэффициента Функциональные зависимости между α и µ приведены ниже: α 0 0,2 0,5 1,0 ∞ µ 1,0 1,16 1,24 1,30 1,56
Рисунок 3 Трактриса Кривые, соответствующие уравнению (1.3), получили название «траловых кривых» (рис. 3). Если пренебречь сопротивлением ваеров и принять Rв = 0, то получим соответственно α = 0 и µ = 1. При µ = 1 уравнение (1.3) представляет собой трактрису прямой линии, у которой отрезок касательной от точки касания до данной прямой (ось ОХ) есть величина постоянная и равная в рассматриваемом случае горизонтальному отстоянию L трала от судна. Если учитывать только сопротивление ваеров (стержней), приняв сопротивление трала равным нулю, то при λ = 0 получим α = ∞ и µ = 1,56. Уравнение (1.3) с µ = 1,56 будет представлять собой уравнение движения стержня в воде. Из данных, характеризующих функциональную зависимость между а и следует, что чем больше коэффициент а, тем больше параметр Расчеты показывают, что для реальных тралов максимальное значение коэффициента α может быть принято равным αmах = 0,45. Этому значению α соответствует µ=1,23. Учитывая, что линии семейства «траловых кривых» нигде, кроме начальной точки, не пересекаются, можно считать, что траектории реальных тралов при L £1 000 м будут находиться внутри полосы, ограниченной с одной стороны трактрисой — «траловой кривой» c µ = 1, а с другой стороны — «траловой кривой» с µ = 1,23. На рис. эта полоса заштрихована. Расчеты и эксперименты показывают, что при ΔK = 60° и L = 1000 м ее максимальная ширина не превышает 100 м, а при ΔK = 30° и L = 1000 м —50 м. При изменении курса судна траловые доски движутся с разными скоростями и имеют разные распорные усилия. Разность распорных усилий траловых досок создает момент силы относительно точки подвеса ваера, который стремится «расширить» полосу, ограниченную «траловыми кривыми» с µ = 1 и µ = 1,23. Исследования, проведенные И. А. Ивановым и В. В. Козловым, показали, что влияние разности распорных усилий траловых досок на ширину этой полосы незначительно. Так, например, по данным расчетов на ЭЦВМ для частного случая ΔK = 60° и L = 1000 м от разности распорных усилий траловых досок полоса становится шире лишь на 17 м. Кроме того следует учесть что, пренебрегая гибкостью ваеров, мы получаем полосу, шире действительной, т. е. с некоторым «запасом». Это в определенной мере компенсирует влияние разности распорных усилий траловых досок при повороте судна. Полученные результаты позволяют решить вопрос о выборе математической модели траектории трала. Анализ уравнения (1.3) показывает, что при умеренной длине вытравленных ваеров и небольших углах ΔK (φ0) в качестве математической модели траектории трала может быть принята «траловая кривая» с µ = 1 (трактриса). Если в процессе маневрирования с тралом L изменяется в широких пределах, например 0<L<1000 м и ΔK £ 60°, то в качестве математической модели траектории трала целесообразно принять «траловую кривую» с µ = 1,16, которая проходит примерно посередине полосы, образованной «траловыми кривыми» с µ.= 1 (трактрисой) и с µ = 1,23 (см. рис.3). Уравнение «траловой кривой» с µ = 1 (трактрисы) является наиболее простым. Поэтому при «ручной» обработке промыслово-навигационной информации в качестве математической модели траектории трала принимают обычно трактрису. Рассмотрим подробнее свойства этой кривой. С точки зрения кинематики трактриса — это траектория, описываемая буксируемой точки Т на нити постоянной длины L (см. рис. и ) при условии, что вектор скорости точки T будет все время направлен на буксирующую точку С(γт = 0). Если точка С движется по прямой, то траектория точки Т будет представлять собой трактрису прямой линии. Уравнение этой кривой в полярной относительной системе координат получим, приняв в выражении ( 1.3) µ.= 1:
или
Это уравнение нетрудно вывести. Воспользуемся принятыми ранее обозначениями и обратимся к рис. , на котором точка Р пересечения перпендикуляров к направлениям скорости точек С (судно) и T (трала) представляет собой мгновенный центр скоростей прямой СТ. Мгновенная угловая скорость этой прямой со будет:
откуда
Интегрируя получим
Так как , qT = π – ΔK, a Vt = S, окончательно можно записать
Анализ уравнения (1.3) показывает, что при небольшой длине вытравленных ваеров трал после изменения курса судна достаточно быстро приходит в диаметральную плоскость судна, а при значительной длине ваеров медленно. Для упрощения расчетов при «ручной» обработке промыслово-навигационной информации, а также при использовании ЭКВМ уравнение (1.3) можно апроксимировать следующими математическими зависимостями-: q′T = 180° — 0,454 q′′T = 180° — 0,454 где qт и ΔК — углы в градусной мере. Ошибки расчета курсового угла с судна на трал по приведенным выше приближенным зависимостям приведены в таблице. В этой таблице qΔ′T = qT - q′T и q′′T = qT - q′′T где qТ — значение курсового угла с судна на трал, вычисленное по формуле ( ) Таблица 1.1
Из таблицы видно, что приближенные математические зависимости позволяют рассчитать курсовой угол на трал в пределах точности удержания судна на курсе при следовании с тралом. Перейдем к прямоугольной системе координат(рис. ), Так как трактриса представляет собой кривую, у которой длина касательной CT является величиной постоянной, равной L, ее дифференциальное уравнение имеет вид y2 + CP2 = L2.
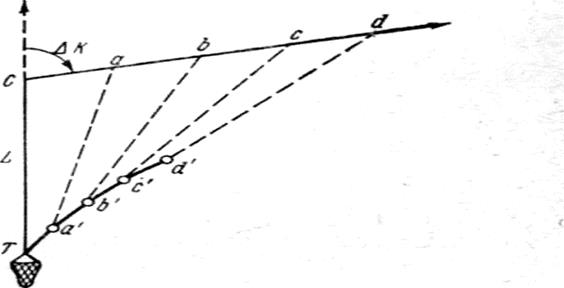
Рис. 1.3. Трактриса в прямоугольной системе координат Длина подкасательной CP для плоской кривой, как известно, будет CP = y a y = LsinqT Следовательно, L2 sin2 qT + L2 sin2 qT откуда dx = ctg qTdy Подставляя в это выражение значение dy=L cos qTdqT, получим dx = L После интегрирования, найдем x = L ln tg где А — постоянная интегрирования. Из начальных условий x = 0, qT = Таким образом, параметрические уравнения трактрисы прямой линии можно записать в таком виде: x = L ln tg y = LsinqT. (1.8) Траектория трала, апроксимируемая трактрисой прямой линии, может быть построена для конкретного случая приближенным графическим способом. На линии нового курса судна выбирают ряд точек а, Ь, с, d и т. д., расположенных на одинаковом и достаточно малом расстоянии одна от другой (рис. 177). Соединяют точку а прямой линией с точкой Т (середина устья трала) и откладывают на этой линии отрезок аа', равный L. Затем соединяют точку Т прямой линией с точкой а' и откладывают на этой линии отрезок bb'=L. Аналогичным образом находят точки с', d' и т. д. Соединив точки Т, а', Ь', с', d' и т. д. согласной кривой, получают трактрису прямой линии.
Рис. 1.4. Построение трактрисы При прицельном облове локальных и в особенности быстроподвижных косяков рыбы курс траления должен определяться с учетом бокового уклонения трала после поворота судна. Так как трал выйдет на линию курса после того, как судно пройдет новым курсом некоторое расстояние 5, возникает вопрос: при каком расстоянии от точки встречи трала и ядра (центра плотности) облавливаемого косяка при расчете курса прицельного траления необходимо учитывать траекторию трала? Из приведенных данных натурных наблюдений видно, что при изменении курса судна на углы до 60° учитывать траекторию трала необходимо, если расстояние от точки поворота судна, буксирующего трал, до точки встречи трала и ядра косяка не превышает удвоенного горизонтального отстояния трала от судна, т. е. если При обнаружении локального косяка, имеющего промысловое значение, впереди траверза на достаточно большом расстоянии Выше предполагалось, что учет траектории трала при прицельном тралении осуществляется путем использования различных математических моделей этой траектории. Следует, однако, иметь в виду, что положение трала относительно судна может быть определено и с помощью специальных приборов с гидроакустическим или кабельным каналами связи. Такие приборы в настоящее время разрабатываются. Кроме того, положение трала относительно судна может быть определено и с помощью некоторых современных рыбопоисковых гидроакустических станций. Как будет показано в следующей главе, наведение в горизонтальной плоскости трала на локальный косяк требует определения упрежденного положения трала относительно судна— положения на момент встречи с косяком. Поэтому упомянутые выше приборы не исключают необходимости использования при расчете курсов прицельного траления математических моделей траектории трала. Но они будут способствовать повышению точности прицельного траления. При условии автоматизации процесса разноглубинного тралового лова наличие на судне специального прибора для определения положения трала относительно судна обеспечивает возможность точного наведения в плоскости горизонта трала на ядро локального косяка при условии апроксимации действительной траектории трала близкой к ней математической кривой. Это достигается периодической коррекцией курса траления. |
Последнее изменение этой страницы: 2019-03-20; Просмотров: 755; Нарушение авторского права страницы
 , (1.1)
, (1.1) - вторая производная по времени отφ, где φ, - угол отклоения трала (ваеров) от направления вектора скорости судна;
- вторая производная по времени отφ, где φ, - угол отклоения трала (ваеров) от направления вектора скорости судна;
 ,
, (1.2)
(1.2) ( 1.3 )
( 1.3 ) , где Rв — коэффициент сопротивления единицы длины ваера, λ — коэффициент сопротивления трала.
, где Rв — коэффициент сопротивления единицы длины ваера, λ — коэффициент сопротивления трала.
 (1.5)
(1.5) (1.6)
(1.6)

 ,
,


 .
. , (1.6)
, (1.6) ΔК
ΔК 

 ,
, = L2
= L2
 , (1-7)
, (1-7) имеем A = 0.
имеем A = 0. ,
,
 .
. курс прицельного траления можно выбирать приведением ядра косяка на курсовой угол qc = 0. В этом случае еще до встречи с косяком трал успевает прийти к направлению диаметральной плоскости судна.
курс прицельного траления можно выбирать приведением ядра косяка на курсовой угол qc = 0. В этом случае еще до встречи с косяком трал успевает прийти к направлению диаметральной плоскости судна.