|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электрофизические и электрохимические методы металлообработки.
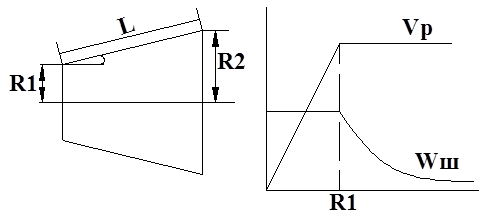
На металлорежущих станках в станкостроении применяются эл.физ. и эл.хим.методы обработки под которыми понимают совокупность эл-ных эл.магнит. и эл.хим. процессов придающих заготовке, в сочетании с тепловым механич. или хим. воздействием, заданные форму и размеры. Эл.эразионные и эл.хим. методы можно разделить на 4-ре группы: 1- эл.эразионные основанные на использовании энергии эл.хим. разрядов возбуждаемых между инструментом и заготовкой. 2- лучевые (лазерные) основанные на воздействие на заготовку лучей с высокой плотностью энергии. 3- импульсные (ультразвуковые) основанные на ударном воздействии на заготовку частиц абразива. 4- анодного растворения основанного на том, что электрод подключенный к положительному потенциалу растворяется. 3.30 Пример обработки усеченного конуса, имеющего наименьший и наибольший радиусы R 1 и R 2 и образующую L . Рассмотрим усеченый конус. Имеет радиусы R1 и R2 и образующую L Если конус образуется постоянной угловой скоростью шпинделя (wШ=const), то расчётная скорость резанья (VР[м/мин]) при наибольшем радиусе может быть определено:WШ=VP/(2×9,55×π×R2)= = VP/(60×R2); Машинное время при обработке с постоянной угловой скоростью: tMIN=L/(WШ×S×9,55)=(2×L×π×R2)/(VP×S), S- подача вдоль образующей (мм/об). Машинное время при обработке с пост. скоростью можно рассчитать tMV=∫ (2π×r/VP×S)dl Для текущего R: r=R1+lsinα, tMV=L×π× (R1+R2)/(VP×S). Можно выразить уравнением tMW-tMV/tMW=1/2×(1-R1/R2) = 1/2×(1-WMIN/WMAX)= 1/2×(D-1/D) (1);WMIN~1/R2; WMAX~1/R1;D= WMAX/WMIN. Видно что отношение не зависит от длинны заготовки и полученное выражение правомерно и при торцовой обработке. Согласно (1) при большом D, экономия машинного времени приближается к 50%. При обработке сферических поверхностей относит-е сокращение машин. времени равно: tMW-tMV/tMW=1/2×(D2-1/D2). Наиболее целесообразно с точки зрения произ-ти диапазон изменения угловой скорости составляет 6-10 при обработке торцовых конических поверхностей, 3-4 при обработке сферических поверхностей. Однако обеспечения частоты обрабатываемой пов-ти необходимо поддерживать постоянную скорость резанья во всём диапазоне изменения радиуса обраб. детали.
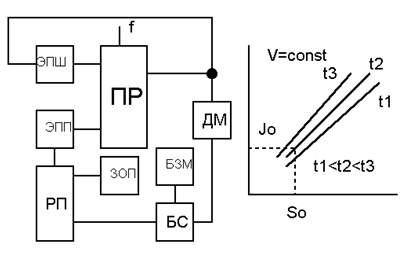
3.31 Показатель эффективности обработки, алгоритм функционирования, структурная схема, рабочие характеристики процесса металлообработки при изменяемой скорости резания V , контролируемых стойкости инструмента Т, глубины резания t Р и неконтролируемой подаче S . Действие возмущающих факторов (f) (износ инструмента, колебания припуска, твёрдости материала заготовки, влияние охл.жид-ти) в этом режиме компенсируется изменением скорости резанья таким образом, чтобы процесс обработки соответствовал заданной стойкости инструмента Т2 и глубиной резанья tР2. tР2 измеряется датчиком ДГР. На процесс резанья воздействует ЭП главного движения (шпинделя и ЭП подачи (ЭПП)), датчик стойкости инструмента ДСИ подключен к входу микропроцессора МП. В ОЗУ МП вводится поправочные коэф. соответ-е глубине резанья КГ и стойкости (износа) инструмента КИ. Max. изменение температуры резанья QMAX вводимое в МП и определяющее задание стойкости инструмента ЗС сравнивается с текущей температурой Q и ограничивает рост скорости резанья при: Q> QMAX. Для всех режимов в которых измеряется термоЭДС естественной термопары инструмент-деталь. Стойкость повышается в 1,5-2 раза и более за счет уменьшения термотока. Трудность реализации датчика глубины резанья ограничивает применение этой структуры. Показатель эффективности обработки J2=k2×V2×tР2 Наличие ограничения T2m= Cv2/V2×tp2x Измеряемый параметр V2 Контролируемый Т2, tР2 Неконтролируемый S2, Алгоритм фун-я tp2= tpmax, V02= Cv2/(T2m×tpmax)
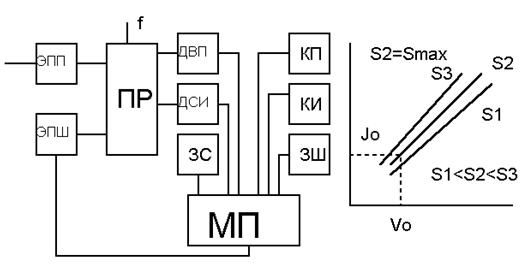
Показатель эффективности обработки, алгоритм функционирования, структурная схема, рабочие характеристики процесса металлообработки при изменяемой скорости резания V , контролируемых стойкости инструмента Т и величине подаче S и неконтролируемой глубины резания t р. Действие возмущающих факторов (f) (износ инструмента, колебания припуска, твёрдости материала заготовки, влияние охл.жид-ти) в этом режиме компенсируется изменением скорости резанья таким образом, чтобы процесс обработки соответствовал заданной стойкости инструмента Т3 и величине подаче S3. На процесс резанья воздействует ЭП главного движения (шпинделя и ЭП подачи (ЭПП)), датчик стойкости инструмента ДСИ подключен к входу микропроцессора МП. Также на МП, вырабатывающий управляющее напряжение соответствующее J3, поступают сигналы от датчика подачи ДВП и информация о коррекции подачи КП и стойкости инструмента КИ. Данная схема информационно избыточной поскольку подача в ней неизменна и информация о подаче может быть включена в МП без применения датчика подачи ДВП. Показатель эффективности обработки J3=k3×V3×S3 Наличие ограничения T3m= Cv3/V2×S3Y Измеряемый параметр V3 Контролируемый Т3, S3 Неконтролируемый tР3, Алгоритм фун-я S03= Smax, V03= Cv3/(T3m×SmaxY)
3.33 Показатель эффективности обработки, алгоритм функционирования, структурная схема, рабочие характеристики процесса металлообработки при изменяемой скорости резания V , контролируемой стойкости инструмента Т и неконтролируемых глубине резания t Р и величине подаче S . Действие возмущающих факторов (f) (износ инструмента, колебания припуска, твёрдости материала заготовки, влияние охл.жид-ти) в этом режиме компенсируется изменением скорости резанья таким образом, чтобы процесс обработки соответствовал заданной стойкости инструмента Т1. На процесс резанья воздействует ЭП главного движения (шпинделя и ЭП подачи (ЭПП)), датчик стойкости инструмента ДСИ подключен к входу микропроцессора МП, в ОЗУ МП поступает априорная информация о заданной стойкости инструмента ЗИ и max. допустимого w ЗШ привода ЭПШ. МП управляет приводом главного движения ЭПШ по алгоритму: V01= Cv1/T1m при V≤VMAX По аналогичной струк-ой схеме построены регуляторы в том числе и аналоговые использующие в качестве датчика стойкости температуры естественной термопары инструмент-деталь и предназначенный для фрезерования, а также для торцовой обработки детали. Это обеспечивает повышение производительности на 30-45%.
Наличие ограничения T1m = Cv1/V01 Измеряемый параметр V1 Контролируемый Т1 Неконтролируемый S1,tР1 Алгоритм фун-я V01= Cv1/T1m Показатель эффективности обработки, алгоритм функционирования, структурная схема, рабочие характеристики процесса металлообработки при изменяемой скорости резания V , контролируемых стойкости инструмента Т, глубине резания t р и величине подаче S . Действие возмущающих факторов (f) (износ инструмента, колебания припуска, твёрдости материала заготовки, влияние охл.жид-ти) в этом режиме компенсируется изменением скорости резанья таким образом, чтобы процесс обработки соответствовал заданной стойкости инструмента Т4. Глубина резанья измеряется датчиком ДГР. На процесс резанья воздействует ЭП главного движения (шпинделя ЭПШ и ЭП подачи (ЭПП)), датчик стойкости инструмента ДСИ подключен к входу микропроцессора МП. Также на МП, вырабатывающий управляющее напряжение соответствующее J4, поступают сигналы от датчика подачи ДВП и информация о коррекции подачи КП, стойкости инструмента КИ коррекция глубины резанья КГ. Данная схема информационно избыточной поскольку подача в ней неизменна и информация о подаче может быть включена в МП без применения датчика подачи ДВП. Трудность реализации датчика глубины резанья ограничивает применение этой структуры. Показатель эффективности обработки J4=k4×V4×S4×tР4 Наличие ограничения T4m= Cv4/(V4×S4Y× tp4X) Измеряемый параметр V4 Контролируемый Т4, S4, tР4 Алгоритм фун-я tp4= tpmax, S04= Smax V04=Cv4/(T4m×tXpmax×SYmax)
Показатель эффективности обработки, алгоритм функционирования, структурная схема, рабочие характеристики процесса металлообработки при изменяемой величине подаче S , контролируемых стойкости инструмента Т и неконтролируемых скорости резания V и глубины резания t р. Действие возмущающих факторов (f) (износ инструмента, колебания припуска, твёрдости материала заготовки, влияние охл.жид-ти) в этом режиме компенсируется изменением величины подачи таким образом, чтобы процесс обработки соответствовал заданной величине подаче S5. На процесс резанья воздействует ЭП главного движения (шпинделя ЭПШ и ЭП подачи (ЭПП)), датчик стойкости инструмента ДСИ подключен к входу микропроцессора МП. Также на МП поступают сигналы от датчика подачи ДВП и информация о коррекции подачи КП, стойкости инструмента КИ. МП вырабатывает управляющее напряжение соответствующее J5 которое подаётся на привод подачи ЭПП. Поступающая в МП информация об ограничении подачи ОП задаёт max. допустимое её значение. Т.к. стойкость инструмента в значительно меньшей степени зависят от подачи чем от скорости резанья, то такая СУ менее эффективна чем остальные. Показатель эффективности обработки J5=k4×S5 Наличие ограничения T5m= Cv5/S5Y Измеряемый параметр S5 Контролируемый Т5 Неконтролируемый V5, tР5 Алгоритм фун-я S05 = Cv51/y/ T5m/Y
Показатель эффективности обработки, алгоритм функционирования, структурная схема, рабочие характеристики процесса металлообработки при изменяемой величине подаче S , контролируемой глубине резания t р и неконтролируемых стойкости инструмента Т, скорости резания V . Действие возмущающих факторов (f) (износ инструмента, колебания припуска, твёрдости материала заготовки, влияние охл.жид-ти) в этом режиме компенсируется изменением величины подачи таким образом, чтобы процесс обработки соответствовал заданной глубине резанья tр. На процесс резанья воздействует ЭП главного движения (шпинделя ЭПШ и ЭП подачи (ЭПП)). Показатель эффективности обработки J6 близок к величине определяющей предельно допустимое значение J6=kР×Sβ×tРα kР- коэф. пропорциональности α,β- показатели степени. В этом случае реализация показателя эффективности решается путём применения систем стабилизации мощности резанья, особенно эффективно при фрезеровании и силовом шлифовании. Мощность потребляемая из сети двигателем ЭПШ (АД) измеряется датчиком мощности ДМ. На блок сравнения БС поступает сигнал пропорциональный мощности резанья и предельно допустимой мощности (с учетом мощности Х.Х. задатчика БЗМ). Выходной сигнал с БС и задатчика ограничения подачи ЗОП подаётся на регулятор РП. Подача регулируется так, чтобы мощность резанья поддерживалась в заданных пределах несмотря на изменения tр, твёрдости заготовки, затупление инструмента. Стабилизация мощности резанья повышает производительность на 25-40%. Рост производ-ти обработки может ограничиваться потерей устойчивости и возникновением недопустимых вибраций в процессе резанья. Для устранения их схема должна содержать корректирующее устройство. Параметры и место включения которых зависят от режима обработки и технологических характеристик станка и привода (предполагается, что они входят в РП). Показатель эффективности обработки J6=kР×Sβ×tРα Наличие ограничения T6m= Cv6/(S6Y×tXР6) Измеряемый параметр S6 Контролируемый tР6 Неконтролируемый V6, Т6 Алгоритм фун-я tp6= tpmax, S06 = Cv61/y/(T5m/y×tx/yРMAX)
|
Последнее изменение этой страницы: 2019-04-10; Просмотров: 237; Нарушение авторского права страницы

 Показатель эффективности обработки J1=k1×V1
Показатель эффективности обработки J1=k1×V1