|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Устройство и кинематическая схема промышленного робота «РМ-01»⇐ ПредыдущаяСтр 13 из 13
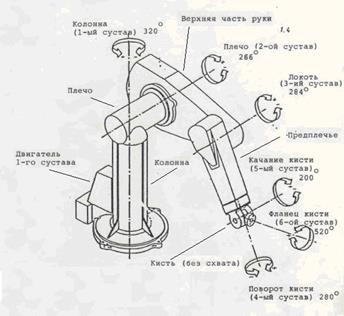
1ая степень подвижности - колонна Двигатель 1-ой степени подвижности установлен в кожухе вне нижней части колонны. 2ая степень подвижности - плечо Двигатель установлен в задней части звена между плечом и локтем. 3ая степень подвижности - локоть Двигатель 3-ей степени подвижности размещен рядом с двигателем 2-ой степени подвижности между плечом и локтем. 4ая, 5-ая и 6-ая степени подвижности - кисть Двигатели размещены в предплечье у локтя. 4ая степень подвижности - вращение кисти. 5ая степень подвижности - качание кисти. 6ая степень подвижности - вращение фланца кисти.
Общий вид манипулятора РМ-01 Кинематическая схема манипулятора РМ-01
Технические хар-ки и системы отсчета координат промышленного робота «РМ-01» Робот промышленный универсальный РМ-01 предназначен для выполнения основных технологических или вспомогательных операций. Технические характеристики: Номинальная грузоподъемность 2,5 кг Погрешность позиционирования 0,1 мм Число степеней подвижности 6 Напряжение питания 220 В Потребляемая мощность 1,2 кВт Давление питания сжатого воздуха 4 – 6 атм. Вид ЧПУ контурно-позиционное сис-ма координат – угловая Система координат Для облегчения программирования робота рассматриваются две системы координат, связанные с рукой робота, - базовая система координат и система координат инструмента. Базовая система координат представляет собой три взаимно перпендикулярные оси (оси X, У, Z) с точкой пересечения, лежащей на оси плеча робота (система координат WORLD). Базовая система координат зафиксирована, она не меняет своего положения при перемещения звеньев робота. Может быть использована при обучении робота. Система координат инструмента также представляет собой три взаимно перпендикулярные оси, но точка пересечения их находится на фланце инструмента. При перемещении руки робота система координат инструмента перемещается вместе с фланцем. Программирование робота При обучении "от точки к точке" используется кнопка SТЕР, посредством которой данные о положении манипулятора записываются в память. Скорость манипулятора можно отрегулировать кнопками ПРУ. Выбранная скорость указывается на светодиодном индикаторе. 3.53 Основные команды операционной системы ARPS Командой SPEED задается базовая скорость движения инструмента. Команда OPEN вызывает разжатие схвата Командой CLOSE реализуется сжатие схвата. Команды управления входами/выходами Команда OUT управляет состоянием выходных линий. Командой OUTGROUP устанавливается значение указанного 16-канального выходного порта. С помощью команды WAITIN можно проверить состояние соответствующей линии. При выполнении этой команды происходит ожидание до тех пор, пока на всех указанных линиях не будет достигнуто требуемое состояние. Командой INCALL инициируется внешнее прерывание. Команда STOP имеет формат: STOP ["текст"],[S], где S - число; "текст" - произвольный текст. При выполнении команды STOP прекращается выполнение программы и на экран отображается текст и число. Продолжение выполнения программы возможно после ввода директивы CONTINUE. Команда HALT, имеющая формат: HALT ["текст"],[S] идентична команде STOP, за исключением того, что после этой команды невозможно продолжить выполнение программы директивой CONTINUE. По команде EXIT останавливается выполнение программы при окончании рабочего цикла. Команда JUMP используется для безусловной передачи управления. Команда IF применяется для организации ветвлений. Команда CALL используется для передачи управления подпрограмме. Каждая подпрограмма должна завершаться командой RETURN. Командой BASE производится сдвиг основной системы координат. Команда DELAY используется для программного задания временных задержек. Команда SET используется для вычисления значения переменной целого типа. По команде CAL выполняется калибровка манипулятора, т.е. вычисляются точные углы сочленений шарниров. Командой GO реализуется интерполированная траектория движения в заданную точку Командой GOS реализуется прямолинейное движение из текущей точки в заданную. Командами GO NEAR и GOS NEAR реализуется перемещение манипулятора по интерполированной /прямолинейной/ траектории на требуемое расстояние к заданной точке в направлении оси системы координат инструмента. По командам MOVE или MOVES манипулятор перемещается на заданное расстояние относительно основной системы координат соответственно по интерполированной или прямолинейной траектории. По команде ALIGN происходит выравнивание инструмента манипулятора по осям основной системы координат. По команде GO READY манипулятор перемещается в вертикальное положение. WHERE выводит на экран значения координат текущей позиции инструмента манипулятора. По команде RUN PROG или RUN PROG,N запускается на выполнение загруженная в ЗУ программа PROG (N - число повторений программы). Команда EXIT позволяет остановить выполнение программы в конце рабочего цикла. При этом число повторений обнуляется. Команда ABORT прерывает выполнение программы в конце текущего шага. Командой CONTINUE возобновляется выполнение прерванной программы. По команде PLIST PROG на дисплей выводится текст программы PROG, а по команде PLIST выводятся тексты всех программ, хранящихся в ЗУ. Командой LLIST выводятся все точки, хранящиеся в ЗУ, а по команде LLIST T1,T2,... на экран выводятся точки T1,T2,.… |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 528; Нарушение авторского права страницы
 Стандартный схват снабжен пневмоцилиндром двойного действия, осуществляющим сжатие и расжатие губок схвата.
Стандартный схват снабжен пневмоцилиндром двойного действия, осуществляющим сжатие и расжатие губок схвата.