
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Если колебание описывать по закону синуса
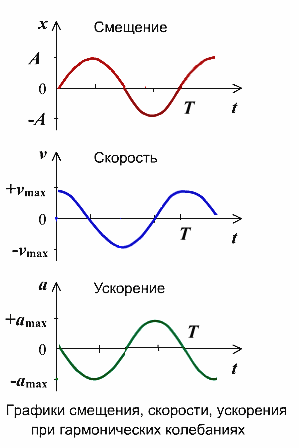
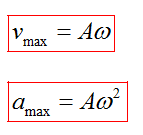
Максимальные значения скорости и ускорения Проанализировав уравнения зависимости v(t) и a(t), можно догадаться, что максимальные значения скорость и ускорение принимают в том случае, когда тригонометрический множитель равен 1 или -1. Определяются по формуле
17. Вынужденные колебания. Резонанс. Автоколебания Колебания, совершающиеся под воздействием внешней периодической силы, называются вынужденными. В этом случае внешняя сила совершает положительную работу и обеспечивает приток энергии к колебательной системе. Она не дает колебаниям затухать, несмотря на действие сил трения. Периодическая внешняя сила может изменяться во времени по различным законам. Особый интерес представляет случай, когда внешняя сила, изменяющаяся по гармоническому закону с частотой ω, воздействует на колебательную систему, способную совершать собственные колебания на некоторой частоте ω0. Если свободные колебания происходят на частоте ω0, которая определяется параметрами системы, то установившиеся вынужденные колебания всегда происходят на частоте ω внешней силы. Рассмотрим в качестве примера вынужденные колебания тела на пружине (рис. 2.5.1). Внешняя сила
где ym – амплитуда колебаний, ω – круговая частота. Такой закон перемещения можно обеспечить с помощью шатунного механизма, преобразующего движение по окружности в поступательно-возвратное движение (рис. 2.5.1).
Если левый конец пружины смещен на расстояние y, а правый – на расстояние x от их первоначального положения, когда пружина была недеформирована, то удлинение пружины Δl равно:
Второй закон Ньютона для тела массой m принимает вид :
В этом уравнении сила, действующая на тело, представлена в виде двух слагаемых. Первое слагаемое в правой части – это упругая сила, стремящаяся возвратить тело в положение равновесия (x = 0). Второе слагаемое – внешнее периодическое воздействие на тело. Это слагаемое и называют вынуждающей силой. Уравнению, выражающему второй закон Ньютона для тела на пружине при наличии внешнего периодического воздействия, можно придать строгую математическую форму, если учесть связь между ускорением тела и его координатой:
где
Установившиеся вынужденные колебания груза на пружине происходят на частоте внешнего воздействия по закону
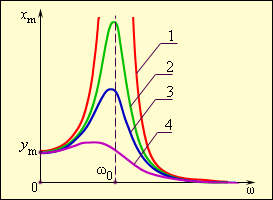
Амплитуда вынужденных колебаний xm и начальная фаза θ зависят от соотношения частот ω0 и ω и от амплитуды <m></m>ymвнешней силы. Если частота ω внешней силы приближается к собственной частоте ω0, возникает резкое возрастание амплитуды вынужденных колебаний. Это явление называется резонансом. Зависимость амплитуды xm вынужденных колебаний от частоты ω вынуждающей силы называется резонансной характеристикой или резонансной кривой (рис. 2.5.2). При резонансе амплитуда xm колебания груза может во много раз превосходить амплитуду ym колебаний свободного (левого) конца пружины, вызванного внешним воздействием. В отсутствие трения амплитуда вынужденных колебаний при резонансе должна неограниченно возрастать. В реальных условиях амплитуда установившихся вынужденных колебаний определяется условием: работа внешней силы в течение периода колебаний должна равняться потерям механической энергии за то же время из-за трения. Чем меньше трение (т. е. чем выше добротность Q колебательной системы), тем больше амплитуда вынужденных колебаний при резонансе. У колебательных систем с не очень высокой добротностью (< 10) резонансная частота несколько смещается в сторону низких частот. Это хорошо заметно на рис. 2.5.2. Явление резонанса может явиться причиной разрушения мостов, зданий и других сооружений, если собственные частоты их колебаний совпадут с частотой периодически действующей силы, возникшей, например, из-за вращения несбалансированного мотора.
Вынужденные колебания – это незатухающие колебания. Неизбежные потери энергии на трение компенсируются подводом энергии от внешнего источника периодически действующей силы. Существуют системы, в которых незатухающие колебания возникают не за счет периодического внешнего воздействия, а в результате имеющейся у таких систем способности самой регулировать поступление энергии от постоянного источника. Такие системы называются автоколебательными, а процесс незатухающих колебаний в таких системах – автоколебаниями. В автоколебательной системе можно выделить три характерных элемента – колебательная система, источник энергии и устройство обратной связи между колебательной системой и источником. В качестве колебательной системы может быть использована любая механическая система, способная совершать собственные затухающие колебания (например, маятник настенных часов). Источником энергии может служить энергия деформация пружины или потенциальная энергия груза в поле тяжести. Устройство обратной связи представляет собой некоторый механизм, с помощью которого автоколебательная система регулирует поступление энергии от источника. На рис. 2.5.3 изображена схема взаимодействия различных элементов автоколебательной системы. Примером механической автоколебательной системы может служить часовой механизм с анкерным ходом (рис. 2.5.4). Механические автоколебательные системы широко распространены в окружающей нас жизни и в технике. Автоколебания совершают паровые машины, двигатели внутреннего сгорания, электрические звонки, струны смычковых музыкальных инструментов, воздушные столбы в трубах духовых инструментов, голосовые связки при разговоре или пении и т. д. 18. Свободные колебания технических систем в реальных условиях протекают, когда на них действуют силы сопротивления. Действие этих сил приводит к уменьшению амплитуды колеблющейся величины. Колебания, амплитуда которых из-за потерь энергии реальной колебательной системы уменьшается с течением времени, называются затухающими. Наиболее часто встречается случаи, когда сила сопротивления пропорциональна скорости движения
где r - коэффициент сопротивления среды. Знак минус показывает, что FC направлена в сторону противоположную скорости. Запишем уравнение колебаний в точке, колеблющийся в среде, коэффициент сопротивлений которой r. По второму закону Ньютона
где β - коэффициент затухания. Этот коэффициент характеризует скорость затухания колебаний, При наличии сил сопротивления энергия колеблющейся системы будет постепенно убывать, колебания будут затухать.
- дифференциальное уравнение затухающих колебаний.
- уравнение затухающих колебаний. ω – частота затухающих колебаний:
Период затухающих колебаний:
Если затухания выражены слабо (β→0), то рассматривать как гармонические колебания, амплитуда которых меняется по экспоненциальному закону
В уравнении (1) А0 и φ0 - произвольные константы, зависящие от выбора момента времени, начиная е которого мы рассматриваем колебания
Рассмотрим колебание в течение, некоторого времени τ, за которое амплитуда уменьшится в е раз
τ - время релаксации. Коэффициент затихания β обратно пропорционален времени, в течение которого амплитуда уменьшается в е раз. Однако коэффициента затухания недостаточна для характеристики затуханий колебаний. Поэтому необходимо ввести такую характеристику для затухания колебаний, в которую входит время одного колебаний. Такой характеристикой является декремент (по-русски: уменьшение) затуханияD, который равен отношению амплитуд, отстоящих по времени на период:
Логарифмический декремент затухания равен логарифму D:
Логарифмический декремент затухания обратно пропорционален числу колебаний, в результате которых амплитуда колебаний уменьшилась в ераз. Логарифмический декремент затухания - постоянная для данной системы величина. Еще одной характеристикой колебательной система является добротность Q. Добротность пропорциональна числу колебаний, совершаемых системой, за время релаксации τ. Добротность Q колебательной системы является мерой относительной диссипации (рассеивания) энергии. Добротность Q колебательной системы называется число, показывающее во сколько раз сила упругости больше силы сопротивления.
Чем больше добротность, тем медленнее происходит затухание, тем затухающие колебания ближе к свободным гармоническим. 19. Понятие волнового процесса
Волновым процессом называется любое изменение (возмущение) состояния сплошной среды, распространяющееся с конечной скоростью и несущее энергию.
Существует большое многообразие волновых процессов (типов волн): звуковые волны, сейсмические, волны на поверхности воды, волны механических колебаний в кристаллах, радиоволны, оптические волны. Во всех волновых процессах наблюдаются сходные закономерности поведения в пространстве и во времени, которые описываются одинаковыми математическими моделями и исследуются общими методами. 20. Интерференция волн Явление интерференции состоит в таком наложении двух (и более) волн, которое приводит к стационарному (не зависящему от времени) усилению колебаний частиц среды в одних местах и ослаблению (или полному погашению) в других местах пространства. Если в некоторой упругой среде распространяются две волны, то каждая частица среды, через которую проходят обе волны, будет одновременно участвовать в двух независимых колебательных движениях, вызванных каждой волной. Результирующее движение частицы зависит от частот, амплитуд и начальных фаз составляющих колебаний. Однако если распространяющиеся волны имеют одинаковые частоты и если они в данной точке пространства вызывают колебания частицы вдоль одной и той же прямой, то возникает либо усиление колебаний, либо их ослабление (погашение), в зависимости от разности фаз составляющих колебаний. В пространстве всегда найдутся такие точки, в которых разность фаз пришедших колебаний составит 2kπ (где k — целое число). Следовательно, в этих точках будет устойчивое (неизменно продолжающееся все время) усиление колебаний частиц среды. Найдутся и такие точки, в которых разность фаз пришедших колебаний будет равна (2k +1)π. В таких точках пространства будет наблюдаться устойчивое ослабление колебаний частиц среды. В результате область пространства, в которой волны накладываются одна на другую, будет представлять собой чередование участков с усиленным колебанием частиц среды и участков, где колебания частиц ослаблены или частицы вовсе не колеблются. Понятно, что интерференционная картина возникает только при наложении таких волн, которые имеют одинаковую частоту, постоянную во времени разность фаз в каждой точке пространства и создают в каждой точке пространства колебания вдоль одной прямой. Волны, удовлетворяющие этим трем условиям (и источники, их создающие), называют когерентными. Простейший случай интерференции наблюдается при наложении бегущей и отраженной волн. Эти волны когерентны (для них выполняются все три условия когерентности). Наложение таких волн приводит к образованию так называемой стоячей волны. Стоячие волны Смещение в стоячей волне. Запишем уравнения двух плоских волн, имеющих одинаковые частоты и амплитуды и распространяющихся в противоположных направлениях:
Суммарное смещение частицы среды с координатой х равно сумме смещений ξ1 и ξ2
или (после тригонометрических преобразований):
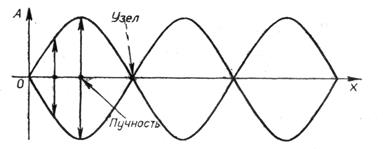
Это и есть уравнение стоячей волны. Оно показывает, что в результате наложения прямой и обратной волн точки среды колеблются так, что все они одновременно проходят положение равновесия (sin ωt = 0) и все они одновременно достигают своих наибольших отклонений (sin ωt = ± 1). Можно было бы сказать, что частицы в стоячей волне колеблются в одной фазе. Однако в силу того, что множитель колеблются либо в одной фазе, если для них Рис.4 Для пояснения сказанного на рисунке 4 приведено распределение смещения частиц среды для различных последовательных моментов времени. В моменты времени t1 и t5 частицы имеют наибольшие отклонения (если иметь в виду поперечную волну в шнуре, то графики описывают истинное положение частиц в пространстве), при этом скорости их равны нулю. В момент t3частицы проходят положение равновесия; скорости их максимальны. Для моментов t2 и t4 показаны распределения смещений между наибольшим и нулевым смещением. На графике выбраны три точки с координатами х1, x2, x3. Для каждого момента времени стрелками показаны скорости этих точек. Из графика видно, что точки х1 и х2 колеблются в противофазе, а точки х1 и x3— в одной фазе. Размахи колебаний у разных точек различны. Так, точка 4 колеблется в пределах отрезка а, б. Амплитуда колебаний частиц в стоячей волне зависит от их координаты, но не зависит от времени:
Здесь знак модуля поставлен потому, что амплитуда — сугубо положительная величина. В стоячей волне имеются такие точки, которые остаются все время неподвижными. Такие характерные точки называются узлами смещения. Положение их определяется из условия
или
Это уравнение удовлетворяется при значениях аргумента
где k = 0, 1, 2, ... . Отсюда
Таким образом, точки с координатами Точки волны, колеблющиеся с наибольшими амплитудами, называются пучностями смещения. Координаты этих точек определяются из условия
или
Это уравнение удовлетворяется при значениях аргумента Отсюда получаем:
Таким образом, наибольшую амплитуду имеют точки с координатами График стоячей волны, приведенный на рисунке 6, носит условный характер: на нем показано, в каких пределах колеблются различные точки среды, в которой образовалась стоячая волна. На этом графике хорошо видны узлы и пучности смещения. Рис.5 Рис.6 Дифракцией называется огибание волнами препятствий, встречающихся на их пути, или в более широком смысле - любое отклонение распространения волн вблизи препятствий от законов геометрической оптики. Слово дифракция происходит от латинского слова diffractus - преломленный.
|
Последнее изменение этой страницы: 2019-04-20; Просмотров: 277; Нарушение авторского права страницы

 приложена к свободному концу пружины. Она заставляет свободный (левый на рис. 2.5.1) конец пружины перемещаться по закону
приложена к свободному концу пружины. Она заставляет свободный (левый на рис. 2.5.1) конец пружины перемещаться по закону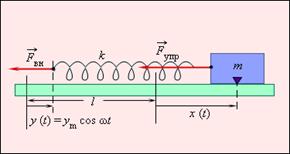
 Тогдауравнение вынужденных колебанийзапишется в виде
Тогдауравнение вынужденных колебанийзапишется в виде
 – собственная круговая частота свободных колебаний, ω – циклическая частота вынуждающей силы. В случае вынужденных колебаний груза на пружине (рис. 2.5.1) величинаA определяется выражением:
– собственная круговая частота свободных колебаний, ω – циклическая частота вынуждающей силы. В случае вынужденных колебаний груза на пружине (рис. 2.5.1) величинаA определяется выражением:






 Затухающие колебания при строгом рассмотрении не являются периодическими. Поэтому о периоде затухаюших колебаний можно говорить, когда β мало.
Затухающие колебания при строгом рассмотрении не являются периодическими. Поэтому о периоде затухаюших колебаний можно говорить, когда β мало. . Затухающие колебания можно
. Затухающие колебания можно




 .
.
 (1)
(1) имеет алгебраический знак, частицы на самом деле
имеет алгебраический знак, частицы на самом деле имеет одинаковый знак, либо в противофазе, если
имеет одинаковый знак, либо в противофазе, если 
 . (2)
. (2)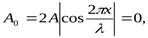


 являютсяузлами смещения. Расстояние между двумя соседними узлами равно
являютсяузлами смещения. Расстояние между двумя соседними узлами равно  .
.

 (где k=0,1,2,…).
(где k=0,1,2,…). .
. Расстояние между двумя соседними пучностями равно
Расстояние между двумя соседними пучностями равно 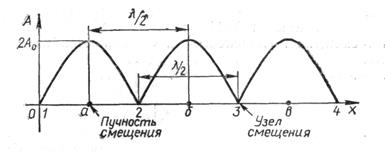
 Принцип Гюйгенса
Принцип Гюйгенса