
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Исследование релейных систем автоматического регулирования методом фазовой плоскости
Цель работы: исследование релейной автоматической системы 2-го порядка на фазовой плоскости. В работе рассматриваются свободные движения системы, обусловленные ненулевыми начальными условиями, периодические режимы, способы стабилизации релейных систем.
Теоретические положения
Релейные автоматические системы являются важной разновидностью нелинейных систем и нашли широкое применение, благодаря конструктивной простоте и быстродействию. В работе рассматриваются процессы, протекающие в системе с одним релейным элементом, структурную схему которой можно представить в виде рис.5.1. На рисунке НЭ - нелинейный (релейный) элемент, имеющий статическую нелинейную характеристику F(x); W(p) - передаточная функция линейной части системы; u, z - сигналы на входе, выходе системы; х - сигнал отклонения (ошибки) системы; у - сигнал на выходе нелинейного элемента.
Рис.5.1
Описание нелинейных систем автоматического управления можно получить из уравнений в изображениях по Лапласу, записанных в соответствии со структурной схемой: X(p) = U(p)-Z(p); Z(p) = W(p)Y(p); Y(p) = L {F(x)}, где L - прямое преобразование Лапласа. Из уравнений следует Х(р) = U(p) - W(p) L {F(x)}, (5.1) откуда при известной передаточной функции линейной части системы легко получить ее дифференциальное уравнение, связывающее выходной и входной сигналы системы. В данной работе рассматривается автономная (u=0) нелинейная система второго порядка с передаточной функцией: W(p) = 1 / р2, для которой легко получить уравнение в изображениях p2 X(p) = -L{F(x)} и дифференциальное уравнение При заданных начальных условиях х(0) и х'(0) получим однозначно определяемое решение уравнения, т.е. кривую x(t). Таким образом, для системы второго порядка две величины: сигнал отклонение (ошибки) x(t) и его производная v=x ’(t) определяют состояние системы. Плоскость, координатами которой являются переменные, полностью определяющие состояние системы, называется фазовой плоскостью (рис.5.2). Метод исследования автоматических систем на фазовой плоскости носит название метода фазовой плоскости. Состояние системы 2-го порядка характеризуется точкой на фазовой плоскости, называемой изображающей точкой. При изменении состояния системы изображающая точка перемещается на фазовой плоскости, описывая кривую, называемую фазовой траекторией. Совокупность фазовых траекторий, построенных при всевозможных начальных условиях, составляет фазовый портрет.
v=dx/dt
Рис.5.2
Фазовые траектории имеют ряд общих черт: они не пересекаются друг с другом (кроме особых точек); перемещение изображающей точки в верхней полуплоскости производится слева направо, а в нижней - справа налево (т.е. по часовой стрелке); пересечение фазовыми траекториями оси абсцисс происходит под прямым углом. На оси абсцисс (при v=0 ) x достигает экстремальных (максимального или минимального значений). Для исследования нелинейной автоматической системы, описываемой уравнением (5.2), опишем ее системой дифференциальных уравнений первого порядка dx/dt = v dv/dt = -F(x). Исключив время t из системы получим dv/dx = - F(x) / v, (5.3) или в общем случае: Уравнение (5.4) представляет собой уравнение фазовых траекторий. Решением этого уравнения является кривая v = f(x), начинающаяся из точки, определяемой начальными условиями (х0, v0), и заканчивающаяся (для устойчивой системы) в особой точке - положении равновесия, определяемой из системы уравнений: Р(х, у) = 0 Q(x, y) = О. В линейных системах существует шесть типов особых точек: центр, устойчивый и неустойчивый фокус, устойчивый и неустойчивый узел, " седло". В нелинейных системах, в отличие от линейных, тип особой точки не всегда определяет поведение изображающей точки на всей фазовой плоскости. Фазовые траектории нелинейной системы могут иметь разный вид в разных областях фазовой плоскости. Фазовые портреты могут содержать: 1) особые точки; 2) сепаратриссы - особые траектории, разделяющие области с траекториями разного типа; 3) предельные циклы - особые траектории, представляющие собой изолированные замкнутые фазовые траектории. В работе исследуются релейные системы со следующими нелинейными элементами:
a) b) c) d) Рис.5.3
Нелинейные элементы относятся к классу кусочно-линейных, принимающих три различных значения: -В, 0, +В на разных участках фазовой плоскости. Решим уравнение (5.2) для этих трех значений нелинейной характеристики dv/dx = {-B, 0, +B}/v 1. F(x) = 0; dv/dx = O; v = C(const); 2. F(x) = - B; dv/dx = - В/v; v dv = - В dx; v2/2 = -Bx + C; 3. F(x) = +B; dv/dx = + В/v; v dv = +B dx; v2/2 = +B x + C.
Вид фазовых траекторий для 3-х значений представляет собой параболы и константы, имеющие вид (рис. 5.4).
 v v
a b c d
Рис.5.4 Рис.5.5 Изображающая точка из положения, определяемого начальными условиями, движется по одной из траекторий, соответствующих значению нелинейной характеристики, меняя вид траектории на линиях переключения, показанных для нелинейностей 3a, b, c, d на рис 5.5 прямыми, параллельными оси ординат. В замкнутой системе с нелинейностями (рис. 5.3) возникают незатухающие периодические процессы, и такая система работает неудовлетворительно. Возникает задача стабилизации релейных систем, которую можно проводить двумя способами: 1) коррекцией по скорости; 2) введением демпфирования - жесткой обратной связи. Коррекция по скорости проводится согласно схеме рис.5.6. Нелинейный элемент с характеристикой F(σ ) имеет линии переключения в виде прямых, параллельных оси ординат в координатных осях σ, v (рис.5.5). Построенные же в координатных осях х, v они будут иметь вид прямых, наклоненных к оси ординат на угол γ, причем tgγ =α, что следует из соотношений: σ =x+α v= {-d, -c, 0, c, d}, или v=-x/α +{-d, -c, 0, c, d}/α (рис.5.5).
Рис.5.6 (В фигурных скобках показаны все возможные значения для нелинейностей, представленных на рис. 5.3). Изменение линий переключения приводит к изменению фазовых портретов и стабилизации систем, хотя форма фазовых траекторий не изменится, и будет иметь вид, представленный на рис. 5.4. Коррекция жесткой обратной связью проводится согласно схеме рис. 5.7.
Рис.5.7 Уравнение (5.1), записанное относительно изображений сигналов при подстановке в него передаточной функции линейной части системы рис.5.7 W(p) = 1/(р(p+γ )) преобразуется в дифференциальное уравнение, описывающее процессы в системе в виде Запишем систему уравнений: dx/dt=v; dv/dt=-F(x)-γ v, из которой, исключив время, получим дифференциальное уравнение, аналогичное (5.3): dv/dx = - (γ v + F(x))/v, или dv v/ ((γ v + F(x)) = -dx, откуда для трех значений нелинейных функций (рис.5.2), легко получить 1. F(x) = 0; dv/dx = -g; v = - g x + const; 2. F(x) = - B; dv v/ (g v - B) = - dx; 3. F(x) = +B; dv v/ (g v + B) = - dx; Вид фазовых траекторий (для случаев 2 и 3 ) может быть получен графическим суммированием относительно v двух графиков: х= -v/γ и x = - B/γ 2 ln|γ v - B| (для - B ); х = -v/γ и х = +-В/γ 2 ln|γ v+B| (для +-В ). Очевидно, что фазовые траектории при этом изменятся, что приведет к стабилизации замкнутой нелинейной системы, хотя линии переключения останутся прежними, параллельными оси ординат. На рис.5.8 представлены фазовые траектории для B=0.25, g=0.3.

, Рис.5.8 В нелинейных системах возможен режим, называемый скользящим режимом, когда фазовые траектории подходят к линии переключения так, как показано на рис.5.9. В этом режиме релейные элементы находятся в вибрационном режиме, а изображающая точка перемещается по линии переключения. v .

Рис.5.9 Подготовка к работе 1. Для нелинейных характеристик и начальных значений, заданных в табл. 1 в соответствии с номером бригады, нарисовать вид фазовых траекторий для процессов в замкнутых системах рис.5.1 (без коррекции), рис.5, 6 (с коррекцией по скорости), рис. 5.7 (с коррекцией жесткой обратной связью). Принять B=0, 25; с=0, 1; d=0, 2. 2. Для указанных нелинейностей найти значение коэффициента α, при котором возникает скользящий режим, и зарисовать соответствующий фазовый портрет. Задание на выполнение работы 1. Смоделировать замкнутую нелинейную систему 2-го порядка (рис.5.1). Для двух нелинейностей и начальных условий, заданных в табл.5.1 в соответствии с номером бригады, наблюдать и зарисовать фазовые портреты и переходные процессы x(t), v(t). 2. Смоделировать замкнутую нелинейную систему с коррекцией по скорости (рис.5.6), установив значения α, заданные в табл.5.1. 3. Подобрать значение α, при котором имеет место скользящий режим. Наблюдать и зарисовать фазовые портреты и переходные процессы x(t), v(t) и y(t). 4. Смоделировать замкнутую нелинейную систему с коррекцией жесткой обратной связью (рис.5.7), установив значения γ, заданные в табл.5.1. Наблюдать и зарисовать фазовые портреты и переходные процессы x(t), v(t). 5. Сделать выводы о влиянии значений α и γ на переходные процессы в системе.
Таблица 5.1
Контрольные вопросы
Литература 1. Теория автоматического управления. Ч. II. Под ред. Нетушила А.В., М.: Высш. школа, 1982, 400 c.
ЛАБОРАТОРНАЯ РАБОТА № 6 |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 994; Нарушение авторского права страницы


 u x НЭ y z
u x НЭ y z 




 F(x) W(p)
F(x) W(p) 
 . (5.2)
. (5.2)
 x
x  . (5.4)
. (5.4)
 F(x) F(x) F(x) F(x)
F(x) F(x) F(x) F(x) 















 B B B B
B B B B 









 x x x x
x x x x 


 - B - B B - B
- B - B B - B 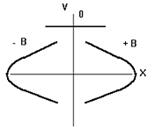












 x s НЭ y 1/p -v 1/p -x
x s НЭ y 1/p -v 1/p -x 







 F(s)
F(s)  - -
- -
 a
a 





 x НЭ y 1/p -v 1/p -x
x НЭ y 1/p -v 1/p -x 





 F(x)
F(x)  - -
- -
 g
g 
 (5.5)
(5.5) v +
v +  ln ½ g v - B½ = - x + const;
ln ½ g v - B½ = - x + const; 









