|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Дневного и заочного обученияСтр 1 из 6Следующая ⇒
КУРС ЛЕКЦИЙ
По дисциплине: «ТЕОРЕТИЧЕСКАЯ МЕХАНИКА» Раздел: «ДИНАМИКА»
Для студентов всех специальностей Дневного и заочного обучения
Лектор: ст. преподаватель Какурина Светлана Константиновна
Красноярск 2012г.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Яблонский А.А., Никифорова В.М. Я 14 Курс теоретической механики. Учебник для техн. вузов. – 7-е изд. стереотипное. – Серия «Учебники для вузов. Специальная литература». – СПб.: Издательство «Лань», 1999. – 768 с. 2. Тарг С.М. Курс теоретической механики. М., 1963 и последующие издания. 3. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах, ч. I и II. М., 1961 и последующие издания. 4. Сборник заданий для курсовых работ по теоретической механике / Под ред. проф. А.А. Яблонского. М., 1968 и последующие издания.
ДИНАМИКА
Динамика – раздел теоретической механики, в котором изучается движение материальных тел в зависимости от действующих на них сил. Динамика - наиболее общий раздел механики, имеющий особое значение для решения многих практических задач в области техники.
Основные законы динамики
1. Закон инерции. Материальная точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока действие других тел не изменит это состояние. Этот закон характеризует стремление тела сохранять неизменной скорость своего движения или, иначе, сохранить приобретённое им ранее механическое движение. Это свойство тела называется его инертностью.
2. Закон пропорциональности силы и ускорения. Ускорение материальной точки пропорционально приложенной к ней силе и имеет одинаковое с ней направление. Это основной закон динамики.
Масса тела определяется как мера инертности тела, с одной стороны, а с другой способность тела создавать поле тяготения и испытывать действие силы в этом поле. m = const; g – переменная, зависит от высоты,
Единицы измерения : m – кг; G, F – H; a, g – м/с2; Система отсчёта, в которой проявляются 1 и 2 законы динамики, называется инерциальной системой отсчёта. Для большинства задач это система осей, связанных с Землёй.
3. Закон равенства действия и противодействия двух тел. При взаимодействии двух тел силы, приложенные к каждому из них, равны по модулю и направлены по одной прямой в противоположные стороны. 4. Закон независимости действия сил. Ускорение, получаемое материальной точкой от одновременно действующей на неё системы сил, равно геометрической сумме ускорений сообщаемых этой точке каждой из сил в отдельности. Материальная точка – тело, размерами которого при изучении его движения можно пренебречь. Дифференциальные уравнения движения материальной точки.
Рассмотрим движение материальной точки М массой m под действи-
Выберем оси координат x; y; z. Основное уравнение динамики имеет вид:
Проецируем обе части уравнения на оси координат:
m.ax = F1x + F2x + … + Fnx = å Fкx; m.ay = F1y + F2y + … + Fny = å Fкy; m.az = F1z + F2z + … + Fnz = å Fкz;
Учитывая, что:
Две основные задачи динамики. С помощью дифференциальных уравнений движения точки решим две основные задачи динамики точки. Первая задача динамики . Зная массу точки и уравнения её движения найти модуль и направление равнодействующей сил, приложенных к точке. m; Задача решается следующим путём:
y = f2(t); F -? Вторая задача динамики . Зная силы, действующие на материальную точку, её массу, а также начальное положение точки и её начальную скорость получить уравнения движения точки. Для решения этой задачи, необходимо полученные уравнения дважды проинтегрировать по времени.
Примеры:
y = 2 t2 , м x = 0, 5 t3 , м Fx = m.ax; Fy = m.ay. t = 1 c _______________ F -?
2. Вторая задача динамики:
f = 0, 3 a = 300 t = 3 c __________ ℓ =?
Начальные условия: при t = 0; x = 0; x/ = V0. Дифференциальное уравнение движения груза в проекции на ось х m.ах = å Fкх (1) где m.x// = mg . sina - Fтр (3) Для определения силы трения запишем дифференциальное уравнение движения груза в проекции на ось у m.ау = å Fку m.ау = N - mg . сos a Так как движение происходит вдоль оси х, то ау = 0 0 = N - mg . сos a N = mg сosa = 10m . 0, 87 = 8, 7 m Fтр = f.N Подставим значения в (3) m.x// = mg sina - mgf сosa (4)
Разделим обе части равенства на m
Разделим переменные
Интегрируем это выражение:
Постоянную интегрирования С1 найдём из начальных условий при t = 0 V = V0 C1= V0
Разделим переменные в уравнении (9)
Интегрируем (10)
Постоянную интегрирования С2 найдём из конечных условий при t = 0; x = 0; C2 = 0. Отсюда длина пройденного пути
Подставим значения
V = 0 f = 0, 2
t -?
Уравнение движения в проекции на ось х m.ax = å Fкх (1) m.ax = - Fтр Сила трения Fтр = fmg Подставим значения в уравнение (1) m.ax = - fmg Сократим массу
отсюда:
Разделим переменные
Интегрируем это выражение
Постоянную интегрирования С1 найдём из начальных условий при t = 0 х = V0 C1= V0 Конечные условия
Подставим значения -fgt + V0 = 0 Fgt = V0 Переведём скорость в м/с V0 = 10 м/с
Система материальных точек.
Системой материальных точек или механической системой называют такую совокупность точек, в которой положение или движение одной точки зависит от положения или движения всех других точек. Механическая система, в которой расстояние между двумя точками не изменяется при её движении, называется неизменяемой (абсолютно твёрдое тело). Механическая система, расстояние между точками которой изменяется при её движении, называется изменяемой (деформируемое тело). Механическая система, движение которой не ограничено никакими связями, а определяется лишь действующими на точки системы силами, называется системой свободных точек или неограниченной системой (Солнечная система, планеты свободно движутся по орбитам, зависящим от действующих на них сил). Механическая система, движение которой ограничено наложенными на точки связями, называется системой несвободных точек или ограниченной (любой механизм или машина, движение отдельных элементов ограничено связями). Все силы, действующие на систему несвободных точек, можно разделить на задаваемые (активные) силы и реакции связей. Все силы, действующие на механическую систему можно разделить и по другому признаку: на внешние и внутренние. Внешними называются силы, действующие на точки системы со стороны точек или тел, не входящих в систему, обозначаем Fе. Внутренними называются силы, действующие со стороны точек или тел, входящих в данную систему, обозначаем Fi. Любая сила может быть как внутренней, так и внешней в зависимости от того, какая механическая система рассматривается. На основании закона равенства действия и противодействия каждой внутренней силе соответствует другая внутренняя сила, равная ей модулю и противоположная по направлению. Из этого следует: 1. Главный вектор всех внутренних сил системы равен нулю,
å Fiкх = 0; å Fiкy = 0; å Fiкz = 0. 2. Главный момент всех внутренних сил системы относительно центра равен нулю, М0i = 0,
å Mix = 0; å Miy = 0; å Miz = 0. Внешние силы не уравновешиваются, так как приложены к различным материальным точкам, следовательно, могут вызывать перемещение этих точек относительно друг друга.
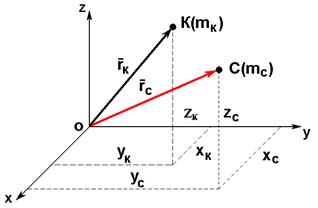
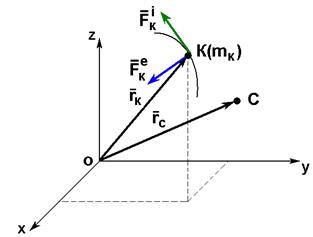
Центр масс системы и его координаты. Рассмотрим механическую систему, состоящую из n материальных
отсчёта OXYZ. Каждая точка имеет определённую массу, а её положение определяется радиусом-вектором координатами xк , yк, zк. Центром масс системы называ- ется точка С, радиус-вектор которой вычисляется по формуле:
где
Проецируя векторы уравнения на оси координат, получаем формулы, определяющие координаты центра масс системы
Как видно из формул, положение центра масс системы зависит только от положения и массы каждой точки системы. Центр тяжести тела или системы тел является центром масс этой системы. Понятие центр масс системы применимо для любой системы независимо от того находится она под действием каких либо сил или нет, центр тяжести применим только для тел, находящихся в однородном поле сил тяжести.
Теорема о движении центра масс механической системы.
Рассмотрим механическую систему, состоящую из n материальных точек. Выделим К точку системы, имеющую массу mк. Запишем для этой точки основное уравнение динамики
Для системы можем записать n таких уравнений. Просуммируем их:
Вместо ак подставим d2rк/dt2 , тогда:
Учитывая, что С центр масс этой системы, а следовательно:
Подставим (2) в (1):
Это – теорема о движении центра масс системы:
Центр масс механической системы движется как материальная точка массой, равной массе системы, к которой приложены все внешние силы. Спроецируем (3) на оси координат, получим:
движения центра масс (4)
Следствия из теоремы: 1) Если главный вектор внешних сил остаётся всё время равным 0, то центр масс механической системы находится в покое или движется равномерно и прямолинейно. Если центр масс движется равномерно и прямолинейно. При этом, если начальная скорость Vco = 0, то центр масс находится в покое.
Задача 1.
V0 = 36 . 103 /(3, 6 . 103) = 10 м/с. mV2 – mV1 = Sк = F.t - mV0 = - m.g.f.t
Задача 2. Снаряд, массы m, летящий с горизонтальной скоростью U, попадает в ящик с песком, установленный на тележке. С какой скоростью начнёт двигаться тележка после удара, если масса тележки вместе с ящиком М ?
Кхо = mU, т.к. тележка неподвижна.
Моменты инерции твёрдого тела. При поступательном движении твёрдого тела или материальной точки мерой инертности является масса тела. При вращательном движении твёрдого тела мерой инертности является момент инерции тела относительно оси вращения.
называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до оси. Iz = å mк. rк2. Полярным моментом инерции твёрдого тела называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния от точки до полюса. I0 = å mк. rк2 . Расстояние от оси до точки, в которой нужно сосредоточить всю массу тела, чтобы момент инерции точки относительно этой оси был равен моменту инерции тела, называется радиусом инерции.
Единицы измерения: Iz – кг.м2, r - м.
При решении задач необходимо вычислять моменты инерций относительно параллельных осей:
Момент инерции твёрдого тела относительно некоторой оси, равен моменту инерции относительно параллельной оси, проходящей через центр масс, сложенному с произведением массы тела на квадрат расстояния между осями.
Iz = Izc + m.h2. Вычисление моментов инерции однородных тел.
1. Момент инерции однородного тонкого стержня.
Стержень длиной ℓ имеет постоянное сечение, площадью А и плотностью r. Масса стержня равна произведению плотности на объём, то есть m = A.ℓ .r. Разобьём стержень по длине на малые элементы, масса элемента длиной DХк равна mк = А.r.DХк. Вычислим момент инерции стержня относительно оси ус: Iyc = å mк Хк2 = å А.r.Хк2.DХк. Перейдём к пределу суммы, получим определённый интеграл:
Подставив в это выражение значение m, получим:
2. Момент инерции тонкого кольца, то есть окружности.
R – радиус окружности, М – масса окружности.
3. Момент инерции круга.
Кинетическим моментом механической системы (главным моментом количества движения механической системы) относительно центра называется векторная величина, равная геометрической сумме моментов количеств движения всех материальных точек, входящих в эту систему, относительно этого центра.
Кинетическим моментом механической системы относительно оси называется скалярная величина, равная алгебраической сумме моментов количеств движения всех точек механической системы относительно той же оси.
Задача 2.
Однородный стержень АВ длиной ℓ и весом G прикреплён шарниром А к вертикальному валу, вращающему- ся с угловой скоростью w. Найти натяжение горизонтальной нити, удерживающей стержень под углом a к валу.
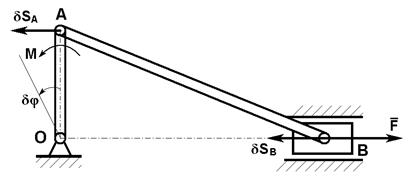
Задача.
Для заданного положения кривошипно-ползунного механизма при равновесии, найти зависимость между моментом и силой, если ОА = ℓ.
Общее уравнение динамики.
Принцип возможных перемещений даёт общий метод решения задач статики. С другой стороны, принцип Даламбера позволяет использовать методы статики для решения задач динамики. Следовательно, применяя эти два принципа одновременно, можно получить общий метод решения задач динамики. Рассмотрим механическую систему, на которую наложены идеальные связи. Если ко всем точкам системы, кроме действующих на них активных сил
Так как связи идеальные, то:
Тогда:
Это равенство представляет общее уравнение динамики.
Из него вытекает принцип Даламбера-Лагранжа– при движении системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю.
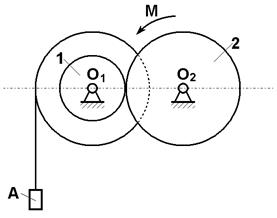
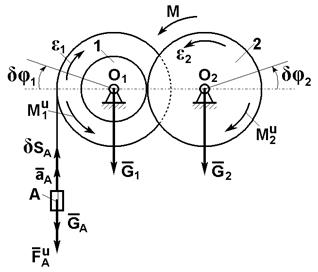
Задача.
В подъёмнике к шестерне 2 веса 2G c радиусом R2=R приложен вращающий момент М=4GR. Определить ускорение поднимаемого груза А весом G, пренебрегая весом верёвки и трением в осях. Барабан, на который наматывается верёвка, и жёстко скреплённая с ним шестерня 1, имеют общий вес 4G и радиус инерции r = R. Радиус барабана RA = R и шестерни 1 R1=0, 5R.
Изобразим все действующие силы, направление ускорений и возможные перемещения.
G2 = 2G R2 = R M = 4GR GA = G r = R RБ = R R1 = 0, 5R ________________
aA -?
Подставим в общее уравнение динамики
Подставим значения
δ φ 1≠ 0 Выразим все ускорения через искомое аА и приравняем выражение в скобках к нулю
Подставим значения
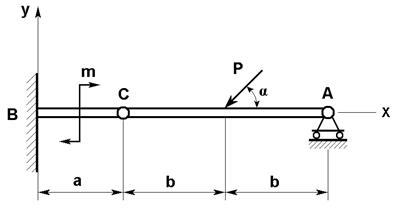
Принцип возможных перемещений.
b = 2а = 0, 3 м a = p¤4 рад Р = 40 Н m = 1, 2 Нм _________________
хВ; уВ; NA; Mp
Решение: Найдём реакцию подвижной опоры А для чего мысленно отбросим эту связь, заменив её действие реакцией NA
Возможным перемещением стержня АС является его поворот вокруг шарнира С на угол dj. Стержень ВС остаётся неподвижным. Составим уравнение работ, учитывая, что работа сил при повороте тела равна произведению момента силы относительно центра вращения на угол поворота тела.
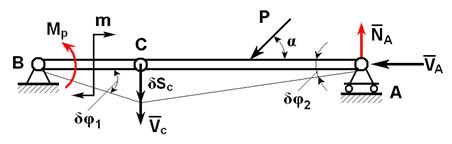
Для определения реакций жёсткого закрепления в опоре В сначала найдём момент реакции Мр. Для этого отбросим связь, препятствующую повороту стержня ВС, заменив жёсткое закрепление шарнирно-неподвижной опорой и приложив момент Мр.
Сообщим стержню возможный поворот на угол dj1. Составим уравнение работ для стержня ВС:
Определим перемещения:
Для определения вертикальной составляющей
Сообщим левой части (стержню ВС с ползуном В ) возможную скорость VB поступательного движения вниз. Стержень АС повернётся вокруг точки А. Составим уравнение работ:
Для определения горизонтальной составляющей
Сообщим левой части (ползуну В вместе со стержнем ВС ) возможную скорость VB поступательного движения влево. Так как опора А на катках, то и правая часть будет перемещаться поступательно с той же скоростью. Следовательно Составим уравнение работ для всей конструкции.
Для проверки правильности решения составим уравнения равновесия всей системы:
Условие выполнено.
Ответ: yB = -14, 2 H; XB = -28, 4 H; NA = 14, 2 H; VP =3, 33 Hм. Обобщённые скорости. Обобщённые силы.
Независимые величины, однозначно определяющие положение всех точек механической системы, называются обобщёнными координатами.– q Если система имеет S степеней свободы, то её положение будет определяться S обобщёнными координатами:
q1; q2; …; qs.
Поскольку обобщённые координаты между собой независимы, то элементарные приращения этих координат будут также независимы:
dq1; dq2; …; dqS.
При этом каждая из величин dq1; dq2; …; dqS определяет соответствующее, независимое от других возможное перемещение системы. При движении системы её обобщённые координаты будут с течением времени непрерывно изменяться, закон этого движения определяется уравнениями:
Это уравнения движения системы в обощённых координатах. Производные от обобщённых координат по времени называются обобщёнными скоростями системы:
Размерность зависит от размерности q. Рассмотрим механическую систему, состоящую из n материальных точек, на которые действуют силы F1, F2, Fn. Пусть система имеет S степеней свободы и её положение определяется обобщёнными координатами q1; q2; q3. Сообщим системе возможное перемещение, при котором координата q1 получает приращение dq1, а остальные координаты не изменяются. Тогда радиус-вектор к-той точки получает элементарное приращение (drk)1. Это приращение, которое получает радиус-вектор при изменении только координаты q1 на величину dq1. Остальные координаты остаются неизменными. Поэтому (drk)1 вычисляется как частный дифференциал:
Вычислим элементарную работу всех приложенных сил:
Вынесем за скобки dq1, получим:
где Итак, обобщённая сила – это коэффициент при приращениях обобщённой координаты. Вычисление обобщённых сил сводится к вычислению возможной элементарной работы. Если меняются все q, то:
Согласно принципа возможных перемещений, для равновесия системы необходимо и достаточно, чтобы SdАак = 0. В обобщённых координатах Q1.dq1 + Q2.dq2 + … + Qs.dqs = 0 следовательно, для равновесия системы необходимо и достаточно, чтобы обобщённые силы, соответствующие выбранным для системы возможным перемещениям, а значит и обобщённым координатам, были равны нулю. Q1 = 0; Q2 = 0; … Qs = 0.
Уравнения Лагранжа.
Используя общее уравнение динамики для механической системы, можно найти уравнения движения механической системы.
Если обобщённые силы инерции выразить через кинетическую энергию системы, то уравнения будут выглядеть следующим образом:
- дифференциальные уравнения движения механической системы в обобщённых координатах.
Для решения задач, то есть для составления уравнений Лагранжа необходимо: 1) установить число степеней свободы системы и выбрать обобщённые координаты; 2) изобразить систему в произвольном положении и показать действующие активные силы; 3) вычислить обобщённые силы; 4) определить кинетическую энергию системы, выразить эту энергию через обобщённые скорости и обобщённые координаты; 5) найти соответствующие частные производные от Т по
Теория удара.
Движение тела под действием обычных сил характеризуется непрерывным изменением модулей и направлений скоростей этого тела. Однако встречаются случаи, когда скорости точек тела, а следовательно и количество движения твёрдого тела за очень маленький промежуток времени получают конечные изменения.
Явление, при котором за ничтожно малый промежуток времени скорости точек тела изменяются на конечную величину, называется ударом.
Силы, при действии которых происходит удар, называются ударными.
Малый промежуток времени t , в течение которого происходит удар, называется временем удара.
Так как ударные силы очень велики и за время удара изменяются в значительных пределах, то в теории удара в качестве меры взаимодействия тел рассматривают не сами ударные силы, а их импульсы. Импульсы неударных сил за время t будут величинами очень малыми и ими можно пренебречь. Теорема об изменении количества движения точки при ударе:
где v – скорость точки в начале удара, u – скорость точки в конце удара.
Основное уравнение теории удара. |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 337; Нарушение авторского права страницы
 - основное уравнение динамики
- основное уравнение динамики  ; следовательно G – переменная величина.
; следовательно G – переменная величина. 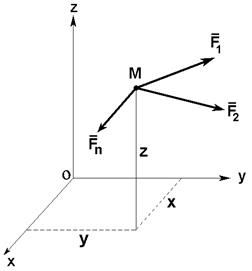 ем приложенных к ней сил
ем приложенных к ней сил  ,
,  , …
, …  .
.



 получим:
получим:  - дифференциальные уравнения движения
- дифференциальные уравнения движения материальной точки.
материальной точки.
 x = f1(t);
x = f1(t); 
 1. m = 2 кг
1. m = 2 кг 
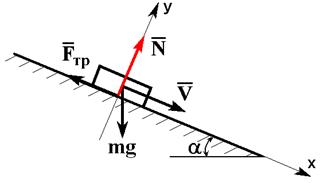 Груз двигался по наклонной плоскости с начальной скоростью V0 в течение времени t. Определить длину пройденного пути.
Груз двигался по наклонной плоскости с начальной скоростью V0 в течение времени t. Определить длину пройденного пути. V0 = 2 м/с
V0 = 2 м/с (2)
(2) (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9) (10)
(10) (11)
(11) (12)
(12) м
м
 3. V0 = 36 км/ч
3. V0 = 36 км/ч






 точек, которые совершают дви- жение относительно системы
точек, которые совершают дви- жение относительно системы или
или ,
,  - масса системы.
- масса системы.
 - равнодействующие силы.
- равнодействующие силы.
 (1)
(1)
 (2)
(2)
 или
или  (3)
(3)
 дифференциальные уравнения
дифференциальные уравнения
 , то из (3)
, то из (3)  , но
, но  отсюда Vc = const то есть
отсюда Vc = const то есть Автомобиль движется со скоростью V0 = 36 км/час. Через какое время он остановится, если f = 0, 4.
Автомобиль движется со скоростью V0 = 36 км/час. Через какое время он остановится, если f = 0, 4. 



 Кх1 = (m + M)V;
Кх1 = (m + M)V;  .
. Осевым моментом инерции твёрдого тела
Осевым моментом инерции твёрдого тела

 Определим момент инерции однородного тонкого стержня относительно оси, проходящей через точку С.
Определим момент инерции однородного тонкого стержня относительно оси, проходящей через точку С. 








 – проходит через центр тяжести D.
– проходит через центр тяжести D. 








 и реакций связей
и реакций связей  , прибавить соответствующие силы инерции
, прибавить соответствующие силы инерции  , то согласно принципу Даламбера полученная система сил будет находиться в равновесии. Применяя принцип возможных перемещений, получим:
, то согласно принципу Даламбера полученная система сил будет находиться в равновесии. Применяя принцип возможных перемещений, получим: 





 Выразим перемещение через угол поворота δ φ 1
Выразим перемещение через угол поворота δ φ 1 








 а = 0, 15 м
а = 0, 15 м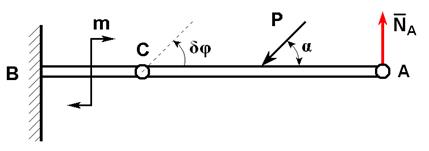




 реакции жёского закрепления отбросим связь, препятствующую вертикальному перемещению точки В, заменив жёсткое закрепление скользящей (невозможен поворот) и приложив реакцию
реакции жёского закрепления отбросим связь, препятствующую вертикальному перемещению точки В, заменив жёсткое закрепление скользящей (невозможен поворот) и приложив реакцию 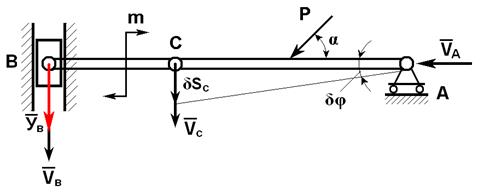



 реакции жёсткого закрепления отбросим связь, препятствующую горизонтальному перемещению точки В заменив жёсткую заделку скользящей и приложив реакцию
реакции жёсткого закрепления отбросим связь, препятствующую горизонтальному перемещению точки В заменив жёсткую заделку скользящей и приложив реакцию 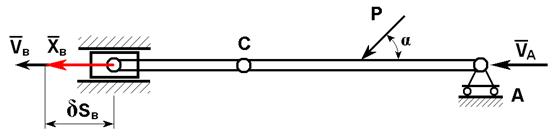
 .
.








 , ….,
, …., 
 - обобщённая сила.
- обобщённая сила. 



 }Уравнения Лагранжа-
}Уравнения Лагранжа- и
и  и подставить все значения в уравнение.
и подставить все значения в уравнение.