
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Лектор: ст. преподаватель Какурина Светлана Константиновна
Красноярск 2012г.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Яблонский А.А., Никифорова В.М. Я 14 Курс теоретической механики. Учебник для техн. вузов. – 7-е изд. стереотипное. – Серия «Учебники для вузов. Специальная литература». – СПб.: Издательство «Лань», 1999. – 768 с. 2. Тарг С.М. Курс теоретической механики. М., 1963 и последующие издания. 3. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах, ч. I и II. М., 1961 и последующие издания. 4. Сборник заданий для курсовых работ по теоретической механике / Под ред. проф. А.А. Яблонского. М., 1968 и последующие издания.
ДИНАМИКА
Динамика – раздел теоретической механики, в котором изучается движение материальных тел в зависимости от действующих на них сил. Динамика - наиболее общий раздел механики, имеющий особое значение для решения многих практических задач в области техники.
Основные законы динамики
1. Закон инерции. Материальная точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока действие других тел не изменит это состояние. Этот закон характеризует стремление тела сохранять неизменной скорость своего движения или, иначе, сохранить приобретённое им ранее механическое движение. Это свойство тела называется его инертностью.
2. Закон пропорциональности силы и ускорения. Ускорение материальной точки пропорционально приложенной к ней силе и имеет одинаковое с ней направление. Это основной закон динамики.
Масса тела определяется как мера инертности тела, с одной стороны, а с другой способность тела создавать поле тяготения и испытывать действие силы в этом поле. m = const; g – переменная, зависит от высоты,
Единицы измерения : m – кг; G, F – H; a, g – м/с2; Система отсчёта, в которой проявляются 1 и 2 законы динамики, называется инерциальной системой отсчёта. Для большинства задач это система осей, связанных с Землёй.
3. Закон равенства действия и противодействия двух тел. При взаимодействии двух тел силы, приложенные к каждому из них, равны по модулю и направлены по одной прямой в противоположные стороны. 4. Закон независимости действия сил. Ускорение, получаемое материальной точкой от одновременно действующей на неё системы сил, равно геометрической сумме ускорений сообщаемых этой точке каждой из сил в отдельности. Материальная точка – тело, размерами которого при изучении его движения можно пренебречь. Дифференциальные уравнения движения материальной точки.
Рассмотрим движение материальной точки М массой m под действи-
Выберем оси координат x; y; z. Основное уравнение динамики имеет вид:
Проецируем обе части уравнения на оси координат:
m.ax = F1x + F2x + … + Fnx = å Fкx; m.ay = F1y + F2y + … + Fny = å Fкy; m.az = F1z + F2z + … + Fnz = å Fкz;
Учитывая, что:
Две основные задачи динамики. С помощью дифференциальных уравнений движения точки решим две основные задачи динамики точки. Первая задача динамики . Зная массу точки и уравнения её движения найти модуль и направление равнодействующей сил, приложенных к точке. m; Задача решается следующим путём:
y = f2(t); F -? Вторая задача динамики . Зная силы, действующие на материальную точку, её массу, а также начальное положение точки и её начальную скорость получить уравнения движения точки. Для решения этой задачи, необходимо полученные уравнения дважды проинтегрировать по времени.
Примеры:
y = 2 t2 , м x = 0, 5 t3 , м Fx = m.ax; Fy = m.ay. t = 1 c _______________ F -?
2. Вторая задача динамики:
f = 0, 3 a = 300 t = 3 c __________ ℓ =?
Начальные условия: при t = 0; x = 0; x/ = V0. Дифференциальное уравнение движения груза в проекции на ось х m.ах = å Fкх (1) где m.x// = mg . sina - Fтр (3) Для определения силы трения запишем дифференциальное уравнение движения груза в проекции на ось у m.ау = å Fку m.ау = N - mg . сos a Так как движение происходит вдоль оси х, то ау = 0 0 = N - mg . сos a N = mg сosa = 10m . 0, 87 = 8, 7 m Fтр = f.N Подставим значения в (3) m.x// = mg sina - mgf сosa (4)
Разделим обе части равенства на m
Разделим переменные
Интегрируем это выражение:
Постоянную интегрирования С1 найдём из начальных условий при t = 0 V = V0 C1= V0
Разделим переменные в уравнении (9)
Интегрируем (10)
Постоянную интегрирования С2 найдём из конечных условий при t = 0; x = 0; C2 = 0. Отсюда длина пройденного пути
Подставим значения
V = 0 f = 0, 2
t -?
Уравнение движения в проекции на ось х m.ax = å Fкх (1) m.ax = - Fтр Сила трения Fтр = fmg Подставим значения в уравнение (1) m.ax = - fmg Сократим массу
отсюда:
Разделим переменные
Интегрируем это выражение
Постоянную интегрирования С1 найдём из начальных условий при t = 0 х = V0 C1= V0 Конечные условия
Подставим значения -fgt + V0 = 0 Fgt = V0 Переведём скорость в м/с V0 = 10 м/с
Система материальных точек.
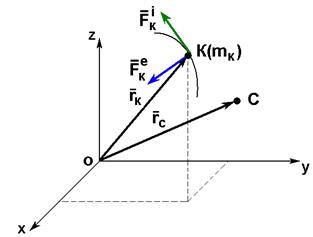
Системой материальных точек или механической системой называют такую совокупность точек, в которой положение или движение одной точки зависит от положения или движения всех других точек. Механическая система, в которой расстояние между двумя точками не изменяется при её движении, называется неизменяемой (абсолютно твёрдое тело). Механическая система, расстояние между точками которой изменяется при её движении, называется изменяемой (деформируемое тело). Механическая система, движение которой не ограничено никакими связями, а определяется лишь действующими на точки системы силами, называется системой свободных точек или неограниченной системой (Солнечная система, планеты свободно движутся по орбитам, зависящим от действующих на них сил). Механическая система, движение которой ограничено наложенными на точки связями, называется системой несвободных точек или ограниченной (любой механизм или машина, движение отдельных элементов ограничено связями). Все силы, действующие на систему несвободных точек, можно разделить на задаваемые (активные) силы и реакции связей. Все силы, действующие на механическую систему можно разделить и по другому признаку: на внешние и внутренние. Внешними называются силы, действующие на точки системы со стороны точек или тел, не входящих в систему, обозначаем Fе. Внутренними называются силы, действующие со стороны точек или тел, входящих в данную систему, обозначаем Fi. Любая сила может быть как внутренней, так и внешней в зависимости от того, какая механическая система рассматривается. На основании закона равенства действия и противодействия каждой внутренней силе соответствует другая внутренняя сила, равная ей модулю и противоположная по направлению. Из этого следует: 1. Главный вектор всех внутренних сил системы равен нулю,
å Fiкх = 0; å Fiкy = 0; å Fiкz = 0. 2. Главный момент всех внутренних сил системы относительно центра равен нулю, М0i = 0,
å Mix = 0; å Miy = 0; å Miz = 0. Внешние силы не уравновешиваются, так как приложены к различным материальным точкам, следовательно, могут вызывать перемещение этих точек относительно друг друга.
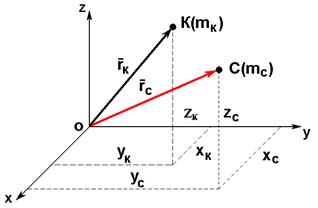
Центр масс системы и его координаты. Рассмотрим механическую систему, состоящую из n материальных
отсчёта OXYZ. Каждая точка имеет определённую массу, а её положение определяется радиусом-вектором координатами xк , yк, zк. Центром масс системы называ- ется точка С, радиус-вектор которой вычисляется по формуле:
где
Проецируя векторы уравнения на оси координат, получаем формулы, определяющие координаты центра масс системы
Как видно из формул, положение центра масс системы зависит только от положения и массы каждой точки системы. Центр тяжести тела или системы тел является центром масс этой системы. Понятие центр масс системы применимо для любой системы независимо от того находится она под действием каких либо сил или нет, центр тяжести применим только для тел, находящихся в однородном поле сил тяжести.
Теорема о движении центра масс механической системы.
Рассмотрим механическую систему, состоящую из n материальных точек. Выделим К точку системы, имеющую массу mк. Запишем для этой точки основное уравнение динамики
Для системы можем записать n таких уравнений. Просуммируем их:
Вместо ак подставим d2rк/dt2 , тогда:
Учитывая, что С центр масс этой системы, а следовательно:
Подставим (2) в (1):
Это – теорема о движении центра масс системы:
Центр масс механической системы движется как материальная точка массой, равной массе системы, к которой приложены все внешние силы. Спроецируем (3) на оси координат, получим:
движения центра масс (4)
Следствия из теоремы: 1) Если главный вектор внешних сил остаётся всё время равным 0, то центр масс механической системы находится в покое или движется равномерно и прямолинейно. Если центр масс движется равномерно и прямолинейно. При этом, если начальная скорость Vco = 0, то центр масс находится в покое.
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 339; Нарушение авторского права страницы
 - основное уравнение динамики
- основное уравнение динамики  ; следовательно G – переменная величина.
; следовательно G – переменная величина. 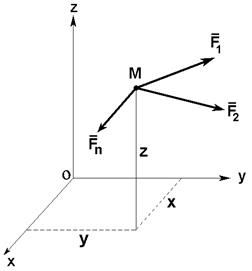 ем приложенных к ней сил
ем приложенных к ней сил  ,
,  , …
, …  .
.



 получим:
получим:  - дифференциальные уравнения движения
- дифференциальные уравнения движения материальной точки.
материальной точки.
 x = f1(t);
x = f1(t); 
 1. m = 2 кг
1. m = 2 кг 
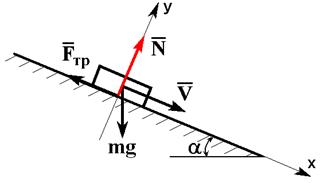 Груз двигался по наклонной плоскости с начальной скоростью V0 в течение времени t. Определить длину пройденного пути.
Груз двигался по наклонной плоскости с начальной скоростью V0 в течение времени t. Определить длину пройденного пути. V0 = 2 м/с
V0 = 2 м/с (2)
(2) (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9) (10)
(10) (11)
(11) (12)
(12) м
м
 3. V0 = 36 км/ч
3. V0 = 36 км/ч






 точек, которые совершают дви- жение относительно системы
точек, которые совершают дви- жение относительно системы или
или ,
,  - масса системы.
- масса системы.
 - равнодействующие силы.
- равнодействующие силы.
 (1)
(1)
 (2)
(2)
 или
или  (3)
(3)
 дифференциальные уравнения
дифференциальные уравнения
 , то из (3)
, то из (3)  , но
, но  отсюда Vc = const то есть
отсюда Vc = const то есть