|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ХИМИКО-ТЕХНОЛОГИЧЕСКИЕ ПРОЦЕССЫ И СИСТЕМЫ АВТОМАТИЗАЦИИ.
Исторический путь развития автоматики Со времён глубокой древности человечество занималось созданием автоматических устройств, предназначенных для облегчения быта, защиты от окружающих опасностей и развлечений. Ещё Герон Александрийский в одной из первых книг по технике описал устройство, в котором исполнялись различные действия автоматами - куклами. На рубеже нашей эры арабы снабдили водяные часы поплавковым регулятором уровня. В средние века в России был сконструирован автомат в виде фигуры Петра I, встававшей с трона при входе кого-нибудь в комнату. В 1675 г. Гюйгенс встроил в механические часы маятниковый регулятор хода. В это же время применяются центробежные маятниковые уравнители хода водяных мельниц. Быстрое развитие автоматики началось в эпоху первой промышленной революции в Европе на рубеже XVIII и XIX веков. В России в г. Барнауле Ползуновым И.И. в 1765 г. сконструирован первый промышленный регулятор – автоматический поплавковый регулятор питания котла паровой машины. Английский механик Д. Уатт в 1784 г. получил патент на центробежный регулятор скорости паровой машины. Тем самым был открыт фундаментальный принцип управления – принцип обратной связи (принцип Ползунова-Уатта). В 1868 г. английский физик Д. Максвелл в работе “О регуляторах” впервые поставил и рассмотрел математическую задачу об устойчивости систем регулирования, где рассмотрены переход к исследованию малых отклонений и линеаризация дифференциальных уравнений, совместное рассмотрение уравнений регулятора и машины, формулировка условий устойчивости линейных систем третьего порядка и постановка перед математиками задачи о нахождении условий устойчивости для уравнений произвольного порядка, в результате чего, появилась работа Рауса (критерий Рауса). В 1876 г. в трудах Парижской академии И.А. Вышнеградский опубликовал статьи “Об общей теории регуляторов” и “О регуляторах прямого действия”. В этих работах содержались не только основные этапы работы Максвелла: системный подход, линеаризация, исследование устойчивости, но и делался существенный шаг вперёд при рассмотрении основных показателей качества процесса регулирования: монотонность, колебательность, апериодичность. Работами И.А. Вышнеградского было вскрыто и объяснено знаменитое противоречие между точностью и устойчивостью регулирования: при уменьшении статической ошибки регулирования ниже некоторого критического значения система теряет устойчивость. Дальнейшее развитие техники регулирования пошло по пути поиска способов преодоления этого противоречия. Переход от регуляторов прямого действия, перемещающих регулирующие органы непосредственно за счёт энергии измерительного органа, к регуляторам непрямого действия, осуществляющим такие перемещения через силовые усилители, с одной стороны, осложнило проблему устойчивости, введя в контур дополнительные инерционные звенья, с другой стороны, сделало схемы регуляторов более гибкими, дав возможность введения в различные точки схемы дополнительных связей и корректирующих звеньев. В 1830 г. Понселе предложил построить регулятор, действующий по возмущению. Принцип Понселе (принцип компенсации возмущающего воздействия) – второй фундаментальный принцип управления. В 1845 г. братья Сименсы предложили воздействовать на регулируемый объект в функции производной отклонения регулируемой величины (принцип управления по производным). В 1892 г. вышла работа знаменитого русского учёного А.М. Ляпунова ”Общая задача об устойчивости движения”. Теория устойчивости движения, созданная А.М. Ляпуновым, имеет исключительное значение для многих прикладных дисциплин. К началу XX в. теория регулирования выходит из прикладной механики и формируется в общетехническую дисциплину. В начале ХХ в. выходят работы словацкого учёного А. Стодолы по регулированию гидротурбин и книга русского учёного Н.Е. Жуковского “Регулирование силовых машин”. В 1932 г. американский учёный Х. Найквист предложил критерий устойчивости по частотным характеристикам системы в разомкнутом состоянии, а в 1936 г. А.В. Михайлов показывает преимущества применения частотных методов, предложив свой критерий устойчивости, не требующий предварительного размыкания цепи. С введением частотных методов начинается новый этап ускоренного развития теории управления. Американские учёные Г. Боде и Л. Маккол в 1946 г., русский учёный В.В. Солодовников в 1948 г. разработали метод логарифмических частотных характеристик (ЛЧХ). Если ранее синтез систем осуществлялся путём интуиции и изобретательства, то метод ЛЧХ открыл новые возможности для исследования качества регулирования и создания теории синтеза структур и параметров математическими методами. В 1940-1950 годы сформировалась по существу новая современная теория автоматического управления: в области устойчивости разработаны методы, существенно облегчающие применение различных критериев устойчивости, введены различные количественные оценки показателей качества процессов регулирования (время регулирования, перерегулирование, колебательность, выброс, степень устойчивости). К.Ф. Теодорчиком, Г.А. Бендриковым, У. Ивенсом, Дж. Тракселом разработан метод корневого годографа. П.С. Стрелков и Э.Г. Удерман получили важные результаты по детальному изучению влияния на переходный процесс расположения нулей и полюсов передаточной функции, в частности путём выделения доминирующих полюсов с целью упрощения исследования. Были развиты различные интегральные оценки качества с помощью определённых интегралов с бесконечным верхним пределом. Впервые в 1940 г. В.В. Солодовниковым предложен метод исследования регуляторов путём воспроизведения условий работы системы на электронных моделях. Значительный вклад в развитие теории управления внесли А.А. Красовский, А.А. Фельдбаум, Г. Джеймс, Н. Никольс, Р. Филлипс, И.Н. Вознесенский, Г.В. Щипанов, Б.Н. Петров, Е.П. Попов, В.А. Бесекерский, А.В. Фатеев, А.А. Вавилов, С.М. Фёдоров, Я.З. Цыпкин. Терминология
Основные понятия Теория автоматического управления (ТАУ) ставит перед собой задачу поддержания заданного состояния в течение необходимого времени без участия человека. До 19 века науки об управлении не существовало. Ее развитие началось в период промышленной революции. Сначала решались задачи регулирования – поддержания заданного значения какой- либо технической характеристики, например: частоты вращения, температуры, давления и т.д. Далее заметили, что принципы управления успешно можно применять не только в технике, но и в экономике, биологии и других науках. Процессы управления и обработки информации в системах любой природы изучает кибернетика. ТАУ является одним из ее разделов, связанных с техническими системами и решает классические задачи регулирования и оптимизации законов управления, а так же вопросы адаптации (самонастройки). Часто названия «теория автоматического регулирования» (ТАР) и «теория автоматического управления» (ТАУ ) используются как синонимы. В зарубежной литературе встречается только один термин « control theory». Мы будем использовать следующую терминологию: 1. Объекты управления 2. Входные и выходные (регулирующие и регулируемые) параметры объекта 3. Возмущающие и управляющие воздействия 4. Управляющая часть в САУ 5. Измерительные преобразователи 6. Исполнительные устройства Для более наглядного пояснения обратимся к примеру, предложенному А.Ю. Ощепковым (1): мы видим лошадь и хотим как можно больше узнать об этом животном. Узнать о заинтересовавшем нас объекте можно многими способами – книги, интернет, рассказы специалистов и т.д. Дальше мы решили на ней прокатиться и сели на лошадь. Теперь конь для нас не объект изучения, а объект управления. Повод в руке всадника – управляющее устройство, взгляд всадника – датчик направления движения, руки реализуют обратную связь, заставляя объект двигаться в нужном направлении с заданной скоростью. Все вместе образует систему управления с обратной связью.
Рисунок №1
Так как в этой системе участвует человек, то это не система автоматического управления. Автоматика – область знаний об устройствах и системах, действующих самостоятельно, без участия человека. Автоматизация – применение математических методов, технических средств и систем сбора и обработки информации для обеспечения функций управления технологическими процессами. Объект автоматизации – технологическое оборудование с реализованным в нем процессом, рассматриваемым с точки зрения управления. Поэтому его обозначают «ТОУ» - технологический объект управления.
Рисунок №3
Автоматизация производства имеет экологическое, социальное и технико-экономическое значение. Средний срок окупаемости САУ около трех лет, что позволило совершить «рывок» в их развитии. Значения автоматизации 1. Благодаря возможности более строго выдерживать технологический регламент повышается объем качественной продукции. 2. Снижаются сырьевые и энергетические затраты на единицу продукции. 3. Повышается производительность труда. 4. Реализуются процессы, которые были невозможны без автоматизации. Экологическое значение заключается в том, что строже регламентируется сброс вредных веществ в окружающую среду и, при этом, уменьшается вероятность непредвиденного сброса отходов. Социальное значение состоит в том, что 1. Облегчаются условия труда. 2. Ликвидируются составляющие, оказывающие вред здоровью обслуживающего персонала. 3. Уменьшается количество обслуживающего персонала на производстве.
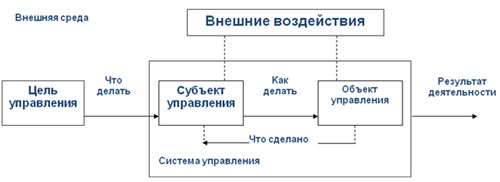
Рисунок №4 СИСТЕМЫ УПРАВЛЕНИЯ. Общие понятия Управление – целенаправленное воздействие на объект с целью обеспечения его оптимального функционирования. Процесс управления в общем виде:
Центральной составляющей для любой САУ является объект управления. К примеру, объектом управления может быть температура воздуха в комнате и температура протекания химической реакции, скорость транспортного средства и скорость протекания химической реакции, количество народонаселения и количество исходной продукции. Второй необходимой составляющей является понятие цели управления, которая состоит в том, чтобы перевести объект в нужное состояние. Субъект управления содержит информацию о ресурсах системы ( подвод электричества или тепла, но и механическая энергия за счет подачи продуктов), контрольную информацию, чтобы знать как проходит процесс, а управляющую – для того, чтобы влиять на этот процесс. С точки зрения управления процесс выглядит так:
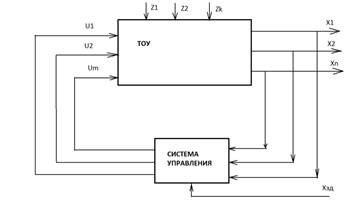
Здесь X – это технологические параметры, характеризующие протекание процесса (расход, давление, температура, состав продукта и т.д.), Xзд – заданные значения технологических параметров, которые являются фиксированными или изменяются по заданному алгоритму, U – управляющие воздействия, т.е. изменение расходов вещества или энергии, подаваемых в объект управления. Система управления формирует управляющие воздействия и вводит их в ТОУ. Технологический объект управления не находится в равновесии из-за наличия возмущающих воздействий Z (состав сырья, расход сырья, изменение коэффициентов теплопередачи в аппарате и т.д.) Таким образом, устройство автоматического управления на основании входящих сигналов должно количественно обработать полученную информацию и выработать сигналы управления по определенному человеком алгоритму или программе. Информационный сигнал не связан с физической природой объекта управления, поэтому САУ рассматривают как абстрактную математическую модель, называемую кибернетическим блоком. В общем виде схему системы управления можно изобразить так:
Рисунок №7
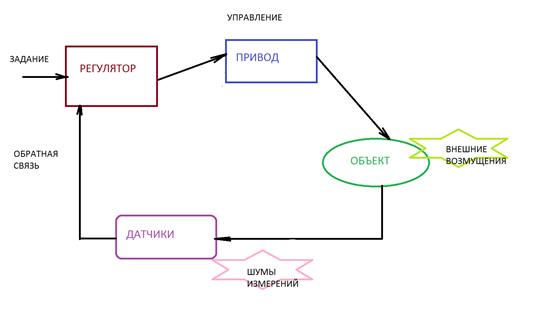
Рассмотрим теперь схему управления в структурном виде:
В типичную схему управления входят объект, регулятор, привод и датчики. Набор этих элементов еще не система, для превращения в систему нужны каналы связи, через которые идет обмен информацией между элементами системы. Для передачи информации используется электрический ток, воздух (пневматические системы), жидкость (гидравлические системы) и компьютерные сети. Взаимосвязанные элементы – это уже система, которая обладает определенными свойствами, присущими только ей. И если бы на объект не действовала окружающая среда – внешние возмущения, которые носят случайный характер, то задача автоматизации решалась бы проще. Внешние возмущения мешают регулятору выполнить поставленную задачу. И еще необходимо понимать, что все датчики измеряют параметры с некоторой погрешностью (шумы измерений). В зависимости от способов решения этих задач рассматривают разные типы СУ. |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 542; Нарушение авторского права страницы