|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ХИМИКО-ТЕХНОЛОГИЧЕСКИЕ ПРОЦЕССЫ КАК ОБЪЕКТЫ УПРАВЛЕНИЯ.
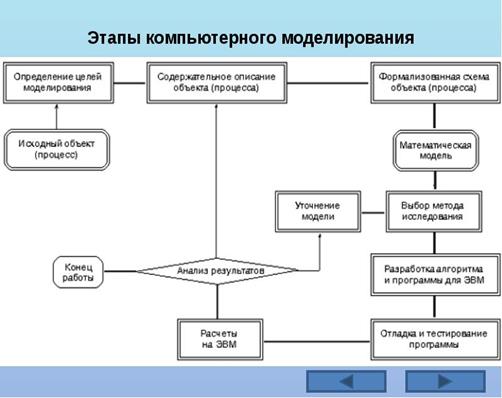
Задачи исследования Цель любого управления – изменить состояние объекта нужным образом. При этом нас интересуют не материальные и тепловые потоки, а влияние одних величин ОУ (объекта управления) на другие. ТАР (теория автоматического регулирования) должна ответить на вопрос «как построить АСР и выбрать регулятор, который будет ПРАВИЛЬНО управлять данным объектом»? Для этого необходимо построить модель системы: объекта, привода, датчиков, каналов связи (информационные каналы, которые показывают влияние входных величин ОУ на выходные), возмущений, шумов. Математическое моделирование Модель – это математическая копия РЕАЛЬНОГО ОБЪЕКТА. Модель и оригинал должны быть похожи с некоторой вероятностью. В современной науке используются описательные (словесные), графические, табличные и другие модели. Мы будем изучать МАТЕМАТИЧЕСКИЕ модели химико-технологических процессов (модели, выраженные в виде формул). Начнем знакомство с основных «заповедей» математического моделирования: 1. Не решай сложную задачу, не решив простую – принцип простоты. 2. Без ошибки нет модели, а потому негрубые модели – плохие – принцип А.А. Андронова. 3. Можно пренебрегать чем угодно, нужно только точно знать, как это повлияет на результат – принцип Э. Хемингуэя. 4. Чем проще модель, тем реже она обманет – принцип надежности. 5. Точность результатов не может быть выше точности исходных данных; точности результатов промежуточных вычислений должны быть согласованы – принцип А.Н. Крылова 6. Цель расчетов – не числа, а понимание. Прежде чем решать задачу, подумай, что делать с ее решением – закон Р. Хемминга. Началом и концом процесса математического моделирования является окружающая действительность. Последовательность действий при постановке задач математического регулирования приведена на схеме
Сначала надо четко определить состав системы, определить, что подается на вход (входы) объекта и что получится на выходе (выходах), установить цель работы системы. Следующий этап моделирования – определить каким законам или частным соотношениям подчиняются объект и другие элементы системы управления, и записать их в виде математических зависимостей между некоторыми числовыми величинами. Числовые величины, связанные с системой, делятся на переменные и параметры. Параметры – это величины, которые можно считать постоянными в промежутке времени рассмотрения системы. Остальные числовые величины являются переменными. Значения переменных и параметров определяют количественную информацию о системе. Оставшаяся информация, качественная, определяет структуру системы. Выбор параметров определяется видом законов (зависимостей), которые применяются для описания. Если полученная модель окажется слишком сложной, ее надо разбить на несколько более простых подзадач – провести декомпозицию. Связь «входа» и «выхода» Любой объект взаимодействует с внешней средой с помощью входов и выходов. Входы – возможные воздействия на объект, выходы – те сигналы, которые можно измерить. Входы независимы, они приходят из внешней среды или от автоматического регулятора. При изменении информации на входе меняются и выходы.
Следовательно, существует некоторое правило, по которому элемент преобразует вход в выход. Это правило называется ОПЕРАТОРОМ и обозначается U[x]. Запись y=U[x] означает, что выход получен в результате применения оператора U к входу х. Построить модель – найти оператор. С его помощью можно предсказать реакцию объекта на любой входной сигнал. Если бы не существовало возмущений, то зафиксировав управляющее воздействие U один раз, можно было бы всегда знать значение выходной величины Y. При наличии возмущения необходимо сформировать такое воздействие U, чтобы скомпенсировать действие возмущения. Для любого ТОУ можно построить множество моделей, которые будут учитывать (или не учитывать) те или иные факторы. На первом этапе стараются описать объект как можно подробней, но при этом бывает трудно теоретически рассчитать закон управления. Но даже если такой расчет возможен, то оказывается сложно это реализовать, или экономически невыгодно его реализовать. Можно упростить модель, отбросив некоторые маловажные, на взгляд разработчика, детали. Закон управления в таком случае получается проще, и часто с его помощью можно добиться желаемого результата, но нет гарантии, что реальная модель будет точно описывать процессы. Обычно используется компромиссный вариант: начинают с простых моделей, стараясь спроектировать регулятор так, что бы он подходил и для сложных моделей. Это свойство называют РОБАСТНОСТЬЮ (грубостью) регулятора (системы). Оно означает нечувствительность к ошибкам моделирования. Затем проверяют модель на реальном объекте, и если результат не удовлетворяет, то усложняют модель. Задача анализа и синтеза Как мы отметили ранее: технологический процесс как объект управления характеризуется входными и выходными переменными. На структурной схеме объекта управления (рисунок 17) выделяются соответствующие группы переменных.
Переменные процесса связаны между собой функциональными зависимостями, и рассматриваются их изменения во времени. Соответственно, должна быть решена задача анализа системы, определено состояние объекта как функция регулирования, возмущающих параметров и времени
и задачи синтеза, расчета регулирующих воздействий в соответствии с заданным критерием
В результате САУ представляет систему, состоящую из последовательно соединенных элементов, выполняющих определенные функции (рисунок 18).
Рисунок 18 Действительное значение регулируемого параметра (X) с помощью датчика “Д” преобразуется в сигнал (Xg) и поступает на элемент сравнения “ЭС”, на который поступает заданное значение (Xзд) регулируемого параметра. В “ЭС” вырабатывается сигнал рассогласования (DX), поступающий на регулирующее устройство “РУ”, в котором сигнал усиливается и формируется регулирующее воздействие (Xр) в соответствии с принятым законом регулирования. Регулирующее воздействие поступает на исполнительный механизм “ИМ”, который перемещает регулирующий орган “РО”, изменяя, соответственно, расход вещества или энергии так, чтобы привести регулируемый параметр к заданному значению. При анализе АСР принято рассматривать упрощенные блок-схемы, в которых элементы “Д”, “ИМ”, “РО” относят к объекту регулирования (рисунок 18).
Рисунок 19 Здесь X – регулируемый параметр, Xз – заданное значение регулируемого параметра, В задачу анализа входит исследование устойчивости и качества работы САУ, в задачу синтеза входит построение схем регулирования, выбор законов управления, расчет параметров отдельных элементов системы. Моделирование ОУ Существует два способа получения модели объекта управления : формальный и физический. При формальном подходе используют модель типа «черный ящик», в которой не содержится информация о физических процессах, происходящих в объекте, или о его структуре. Синтез формальной модели сводится к выбору одной из небольшого числа моделей, описанных ниже, и идентификации ее параметров. При физическом подходе модель объекта составляют в виде системы уравнений, описывающих физические процессы в объекте. При этом в качестве параметров модели могут использоваться геометрия объекта, физические параметры материала, фундаментальные физические константы. В физическую модель могут быть добавлены несколько формальных параметров, которые необходимо определить экспериментально из условия минимизации погрешности моделирования. Достоинством физических моделей является то, что в процессе построения физической модели в нее вносится информация о структуре объекта. Наличие в модели информации о структуре объекта позволяет лучше отфильтровать помехи и возмущения в процессе подгонки модели к экспериментальным данным. Для аналитического исследования САУ необходимо иметь уравнения, описывающие движение этих систем. Решением этих уравнений определяется изменение во времени регулируемой величины или ошибки системы. По характеру изменения этих величин можно получить полное представление о работоспособности и качестве работы системы. В зависимости от характера управляющего или возмущающего воздействий происходят различные изменения регулируемой величины системы. Процесс изменения регулируемой величины системы за все время ее работы называют процессом управления. В процессе управления различают переходные и установившиеся процессы. Переходным процессом называется изменение регулируемой величины при переходе системы из одного состояния в другое установившееся состояние. Установившийся режим системы, относительно которого рассматривается движение системы в процессе управления, называется исходным режимом. Если воздействия после их приложения больше не изменяют своей величины, то в системе устанавливается статический режим. Режим слежения с постоянной скоростью или режим установившихся колебаний выходной величины в устройстве являются не статическими, а установившимися. Полное движение системы (как в переходном, так и в установившемся режимах) описывается уравнением динамики. Обычно эти уравнения бывают дифференциальными.
Приравнивая к нулю члены, содержащие производные по времени, из уравнения динамики получаем уравнение статики:
ТИПЫ ТЕСТОВЫХ ВОЗДЕЙСТВИЙ. Динамические модели характеризуются непостоянством во времени входных, выходных и промежуточных величин, и описываются дифференциальными уравнениями 1-ого или 2-ого порядка ( в основном), содержащими производные ( скорости и ускорения изменения сигналов). Такие модели получают из физических законов, которые заложены в основу изучаемого объекта и, как правило, являются нелинейными. Модель должна описывать связи реальных сигналов в системе, ее внутреннее устройство. Но если внутреннее устройство можно игнорировать, то часто нам достаточно знать, как будет реагировать объект на заданный входной сигнал. Поэтому такие уравнения, составленные без учета внутренних изменений, называют уравнением «вход – выход». Часто необходимо привести модель к стандартному виду. Стандартом в ТАУ считается система дифференциальных уравнений 1-ого порядка, которая называется нормальной формой Коши. Зная значения, описывающие состояние объекта в некоторый момент времени t и входной сигнал u(t), можно рассчитать поведение объекта для любого последующего момента. Обозначив вектор состояния через x(t), а вход объекта (сигнал управления) через u(t), можно назвать модель, связывающую вход с вектором состояния моделью « вход – состояние». Если модель содержит еще и уравнение выхода, которое показывает, как формируется выход, называется «вход – состояние – выход». Линеаризация
Для упрощения решения систем дифференциальных уравнений применяют их линеаризацию. Линеаризацией называется замена нелинейных уравнений линеаризованными. Линеаризация возможна, если характер линеаризуемого уравнения не имеет разрывов и неоднозначностей. Линеаризация методом малых отклонений заключается в следующем. Нелинейная функция переменных, характеризующих движение системы, имеет вид:
Она раскладывается по степеням малых отклонений ее переменных от значений этих переменных для центра разложения, соответствующих исходному режиму движения в ряд Тейлора. Для удобства пользования уравнения динамики обычно приводят к стандартному виду. Переходная функция Любое движение в системе автоматического управления вызывается воздействием, приложенным к системе. Воздействия могут быть управляющими, которые определяют требуемый закон изменения регулируемой величины, и возмущающими, которые стремятся нарушить требуемую функциональную связь между регулируемой величиной и управляющим воздействием. В общем случае воздействия могут изменяться во времени по закону, который заранее определить невозможно. Но среди многообразия воздействий можно выбрать наиболее типичные для рассматриваемой системы и данных условий ее работы. Изучив движение системы под влиянием данного типового воздействия, можно сделать выводы относительно ее динамических свойств. Кроме того, любое сложное воздействие можно представить суммой простых воздействий. Если известна реакция системы на простое воздействие и система линеаризована, то, используя принцип суперпозиции, можно найти реакцию системы на воздействие сложной формы. Поэтому для анализа и синтеза САУ часто используют эталонные типовые воздействия: 1)Единичная ступенчатая функция; 2)Единичная импульсная функция; 3)Гармоническая функция; Единичная ступенчатая функция 1(t) (функция включения Хевисайда) является математическим описанием величины, изменяющейся мгновенно м момент времени t=0 от 0 до 1 и остающейся неизменной впоследствии.
Рисунок 20.
При ступенчатом изменении функции на произвольную величину А, отличную от единицы, используют произведение Примером ступенчатого воздействия может явиться воздействие, оказываемое на систему регулирования напряжения резким сбросом или подключением нагрузки на генератор. Единичная импульсная функция
Функцию Практически за импульсные воздействия можно принимать воздействия, сообщающие системе за время, значительно меньшее продолжительности переходного процесса, конечное количество энергии. Гармоническая функция описывает величины, изменяющиеся во времени по гармоническому закону:
Рисунок
Вещественная форма записи гармонической функции:
Ознакомившись с типовыми воздействиями, перейдем к временным динамическим характеристикам.
Рисунок 21.
Реакция объекта на единичный скачок называется переходной функцией (переходной характеристикой) и обозначается h(t). Переходная функция показывает, как изменяется во времени выходная величина при подаче на вход единичного возмущающего воздействия. То есть, переходной функцией называется реакция предварительно невозбужденного устройства на единичное ступенчатое воздействие ( предполагается, что объект в начальный момент времени находится в состоянии покоя, то есть все переменные состояния равны нулю и внутренняя энергия также нулевая). Импульсной функцией (импульсной характеристикой) g(t) называется реакция предварительно невозбужденного устройства на единичное импульсное воздействие
|
Последнее изменение этой страницы: 2017-04-12; Просмотров: 1177; Нарушение авторского права страницы


 – вектор входных переменных, характеризует состояние процесса и называют управляемыми (регулируемыми) параметрами. Это такие параметры, как температура, давление, состав, концентрация, расход и т.п.
– вектор входных переменных, характеризует состояние процесса и называют управляемыми (регулируемыми) параметрами. Это такие параметры, как температура, давление, состав, концентрация, расход и т.п. – вектор входных переменных, называемых управляющими (регулирующими) воздействиями. К ним относятся параметры, с помощью которых можно изменять материальные и энергетические потоки, в основном расход, давление, температура и т.п.
– вектор входных переменных, называемых управляющими (регулирующими) воздействиями. К ним относятся параметры, с помощью которых можно изменять материальные и энергетические потоки, в основном расход, давление, температура и т.п. – вектор входных переменных, называемых возмущающими воздействиями, являющихся внешними воздействиями по отношению к объекту. Это параметры, связанные с изменением режимов работы процесса и внешней среды такие, как изменение расходов, температур, давлений, состава сырья и т.п.
– вектор входных переменных, называемых возмущающими воздействиями, являющихся внешними воздействиями по отношению к объекту. Это параметры, связанные с изменением режимов работы процесса и внешней среды такие, как изменение расходов, температур, давлений, состава сырья и т.п.



 , где
, где и
и  - коэффициенты, зависящие от параметров системы, x – регулируемая величина, g – управляющая величина, изменяющаяся во времени, m и n – числа, показывающие порядок производных по времени.
- коэффициенты, зависящие от параметров системы, x – регулируемая величина, g – управляющая величина, изменяющаяся во времени, m и n – числа, показывающие порядок производных по времени. или x=k
или x=k  , где
, где  – передаточный коэффициент.
– передаточный коэффициент.


 .
. (дельта- функция Дирака) обозначает бесконечно короткий (по длительности) и бесконечно большой по амплитуде импульс с единичной площадью:
(дельта- функция Дирака) обозначает бесконечно короткий (по длительности) и бесконечно большой по амплитуде импульс с единичной площадью:  =
=  при t=0 и
при t=0 и  при этом
при этом
 можно представить как предельное значение прямоугольного импульса с длительностью
можно представить как предельное значение прямоугольного импульса с длительностью  и амплитудой
и амплитудой  при
при  , при этом
, при этом  ,
,  . Дельта-функцию можно определить и как производную от единичного ступенчатого воздействия:
. Дельта-функцию можно определить и как производную от единичного ступенчатого воздействия:  .
.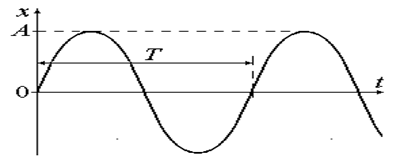



 – амплитуда,
– амплитуда,  – круговая частота,
– круговая частота,  – начальная фаза,
– начальная фаза,  – период колебаний.
– период колебаний.