
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Связь между характеристиками системы регулирования в замкнутом и разомкнутом состояниях
Обозначим W(p) = т.е. передаточная функция замкнутой цепи с отрицательной обратной связью равна передаточной функции прямой цепи, деленной на единицу плюс передаточная функция разомкнутой цепи. Если обратная связь положительная, то W(p) = Эти зависимости справедливы для схемы, когда внешнее воздействие поступает на вход системы управления. Поэтому такую передаточную функцию называют передаточной функцией замкнутой системы по входному воздействию. Замкнутую систему называют часто системой управления по отклонению . В замкнутой системе контролируется непосредственно управляемая величина и тем самым при выработке управляющего воздействия учитывается действие всех возмущений, влияющих на управляемую величину. В этом заключается преимущество замкнутых систем. Но из-за наличия замкнутой цепи воздействий в этих системах могут возникать колебания, которые в некоторых случаях делают систему неработоспособной. Кроме того, сам принцип действия замкнутых систем (принцип управления по отклонению) допускает нежелательные изменения управляемой величины: вначале возмущение должно проявиться на выходе, система “почувствует” отклонение и лишь потом выработает управляющее воздействие, направленное на устранение этого отклонения. Такая “медлительность” снижает эффективность управления. Несмотря на наличие определенных недостатков, этот принцип управления широко применяется при создании АСУ. На рисунке 3(а) и (б) – разомкнутая САУ; 3(в) – замкнутая; 3(г) – комбинированная.
Комбинированная АСУ – система, в которой входными воздействиями ее управляющего устройства являются как внешние (задающее и возмущающее), так и внутреннее (контрольное) воздействия. В действительности кроме управляющего входного воздействия всякая реальная система подвержена различным возмущающим воздействиям, которые могут поступать в систему в любом месте. Для учета их влияния нужно уметь при помощи структурных схем устанавливать зависимости между этими возмущениями и изменениями управляемой (выходной) величины системы. Если передаточная функция
Если передаточная функция разомкнутой системы представляет собой произведение двух передаточных функций инерционных звеньев первого порядка, то переходный процесс в таком эквивалентном звене, как и в апериодическом звене второго порядка, всегда носит апериодический характер. Если такое звено охватить обратной связью, например единичной, то уравнение знаменателя изменится и передаточная функция будет аналогична замкнутой системе:
В этом случае корни полинома знаменателя могут быть комплексными, и замкнутая система станет колебательной. Если передаточная функция разомкнутой системы представляет собой передаточную функцию одного инерционного звена первого порядка и если его охватить обратной связью, то характеристическое уравнение знаменателя изменится и примет вид:
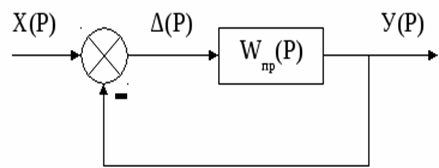
корень характеристического уравнения p= - Итак, за счет обратной связи уменьшается статическая ошибка, или статическое отклонение, и уменьшается инертность объекта регулирования, т.е. в системе с регулятором переходный процесс затухает значительно быстрее, чем в объекте без регулятора. ТИПОВЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. Одноконтурная САУ Под типовой одноконтурной АСУ будем понимать систему, обобщенная функциональная схема которой приведена на рис.3(б, в). Ей соответствует обобщенная алгоритмическая схема (рис. 4).
Объект управления характеризуется одной управляемой переменной X(p), которую требуется стабилизировать на заданном уровне XЗ(p). На стабилизируемую переменную X(p) влияет возмущение XВ(p). Отклонение стабилизируемой переменной X(p), вызываемое этим возмущением компенсируется в системе целенапрвленными изменениями управляющего воздействия Y(p), которое создается регулятором (управляющим устройством). На входе регулятора с передаточной функцией WР(p) действует сигнал рассогласования (ошибки) e(p). Этот сигнал формируется в результате сравнения (алгебраического суммирования) задающего воздействия XЗ(p) и управляемой величины X(p), САУ называют одноконтурной, если при размыкании линии связи в какой либо точке получается цепь из последовательно соединенных звеньев или цепь, не содержащая параллельных и обратных связей. Рассмотрим другую схему. Она отличается от предыдущей тем, что к схеме добавились еще два звена (рисунок 5).
Х – интересующая нас выходная величина, f – возмущение, g – задающее воздействие. Выведем уравнение для передаточных функций, связывающих x с f и g. Учитывая отрицательную обратную связь
т.е. передаточная функция замкнутой САУ, связывающая выходную величину с внешним воздействием, приложенным в произвольной точке системы:
Здесь числитель
Индекс f у передаточной функции замкнутой системы
При исследовании САР часто помимо выходной x величины интерес представляет величина ошибки
Для системы, изображенной на рисунке 5, при одновременном воздействии на нее f и g x= К схеме представленной на рисунке 6, сводятся все одноконтурные САУ, структурные схемы которых содержат, вместо показанных на этой схеме звеньев с передаточными функциями
Согласно правилам замены звеньев, параллельно соединенных с отрицательной (рисунок 6а) или положительной (6б) обратной связью, получим:
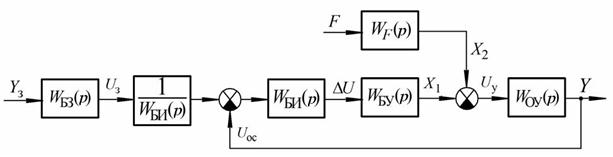
Рассмотрим пример, когда внешние воздействия подаются на суммирующие элементы не непосредственно (рисунок 5), а через звенья с передаточными функциями
Для того, чтобы согласовать сигналы uз(t) и uос(t), необходимо подобрать одинаковые передаточные функции WБЗ (р) и WБИ(р), поэтому должно выполняться равенство: WБЗ (р) = WБИ(р). С учетом этого условия структурную схему системы можно будет представить в виде (рисунок 9). Ошибку регулирования δ (t), можно выразить в тех же единицах измерения, что и значения задающего параметра yз(t) и выходного параметра y(t).
Ошибка δ (t) зависит от величины параметров задающего и возмущающего воздействий, поэтому ее значение можно выразить, как сумму ошибок данных воздействий и представить, как: δ (t) =δ y(t) + δ f(t) (17)
Выразим передаточные функции в следующем виде:
и
Передаточную функцию разомкнутого контура мы выразили, как:
Wрк (р) =WБИ(р) WБУ (р) WОУ(р) (20)
Следовательно, исходя из выражений (18) и (19) величину изображения ошибки можно представить следующим образом:
Поскольку новые звенья не входят в замкнутый контур, а включены с ним последовательно, их наличие не изменяет передаточной функции разомкнутой системы и, следовательно, знаменателей передаточных функций замкнутой системы. Изменяются только числители этих функций, поскольку туда войдут передаточные функции новых звеньев. Рассмотрим пример: необходимо преобразовать структурную схему одноконтурной АСУ в эквивалентную ей и написать передаточную функцию.
Для этого вспомним правила преобразования:

Получим:
|
Последнее изменение этой страницы: 2017-04-12; Просмотров: 1028; Нарушение авторского права страницы

 – передаточные функции прямой и обратной связи.
– передаточные функции прямой и обратной связи. (6)
(6) . (7)
. (7)

 =1, то обратную связь называют единичной. При единичной главной обратной связи величина
=1, то обратную связь называют единичной. При единичной главной обратной связи величина  представляет собой передаточную функцию разомкнутой цепи
представляет собой передаточную функцию разомкнутой цепи  , т.е.
, т.е. =
=  . (8)
. (8) =
=  =
=  (9)
(9)  =
=  (10)
(10)  , где
, где  – постоянная времени инерционного звена, охваченного обратной связью. Следовательно, за счет обратной связи уменьшается инерционность объекта. Постоянная времени уменьшается в (k+1) раз и придает объекту новые динамические качества. Выбором коэффициента усиления можно менять степень инертности объекта.
– постоянная времени инерционного звена, охваченного обратной связью. Следовательно, за счет обратной связи уменьшается инерционность объекта. Постоянная времени уменьшается в (k+1) раз и придает объекту новые динамические качества. Выбором коэффициента усиления можно менять степень инертности объекта.






 , все изменения выходной величины объекта, вызванные каким-либо возмущением, будут компенсироваться в результатепротивоположного действия управляющего устройства.
, все изменения выходной величины объекта, вызванные каким-либо возмущением, будут компенсироваться в результатепротивоположного действия управляющего устройства. , (11)
, (11) . (12)
. (12) представляет собой передаточную функцию, определяющую, как показывают индексы, зависимость x от f при отсутствии обратной связи. Эта передаточная функция зависит от места нахождения x и f в системе. Знаменатель 1+W(p) включает передаточную функцию разомкнутой системы W(p) и не зависит от места нахождения x и f. Для схемы, изображенной на рисунке 3, имеем:
представляет собой передаточную функцию, определяющую, как показывают индексы, зависимость x от f при отсутствии обратной связи. Эта передаточная функция зависит от места нахождения x и f в системе. Знаменатель 1+W(p) включает передаточную функцию разомкнутой системы W(p) и не зависит от места нахождения x и f. Для схемы, изображенной на рисунке 3, имеем:  . (13)
. (13)  показывает, к какому внешнему воздействию она относится. Тогда, передаточная функция, связывающая с x задающим воздействием g,
показывает, к какому внешнему воздействию она относится. Тогда, передаточная функция, связывающая с x задающим воздействием g,  , где
, где  . (14)
. (14) , выразим
, выразим  и подставим в формулу (12)
и подставим в формулу (12) (15)
(15) (16)
(16) любое число последовательно и параллельно соединенных звеньев, а также звеньев, охваченных местными обратными связями, так как каждая группа звеньев может быть заменена одним эквивалентным звеном.
любое число последовательно и параллельно соединенных звеньев, а также звеньев, охваченных местными обратными связями, так как каждая группа звеньев может быть заменена одним эквивалентным звеном.


 (рисунок 7).
(рисунок 7).




 (18)
(18) (19)
(19) (21)
(21)



