|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОБОРУДОВАНИЕ ДЛЯ МЕХАНИЗАЦИИ ТЯЖЕЛЫХ РУЧНЫХ ОПЕРАЦИЙ
Процессы спуска и подъема штанг и труб наиболее трудоемки в общем комплексе работ, связанных с подземным ремонтом. Для уменьшения их трудоемкости разработан комплекс механизмов, позволяющих проводить спуско-подъемные операции по прогрессивной технологии, исключающей перенос элеваторов вручную от устья скважины к мосткам (или наоборот), а также механизировать процессы свинчивания или развинчивания. Впервые эта задача была в комплексе решена Г. В. Молчановым при создании автомата для подземного ремонта скважин, позволившего механизировать и частично автоматизировать наиболее тяжелые ручные операции, сократить время их выполнения. настоящее время выпускается усовершенствованная конструкция автомата Молчанова — автоматы АПР-2ВБ и АПР-ГП, сочетающие в себе механический неподвижный ключ, автоматический спайдер, центратор и инерционный привод. Автомат механизирует операции по свинчиванию и развинчиванию, автоматизирует центрирование трубы, захват, удержание на весу и освобождение колонны труб. Он рассчитан на работу совместно с одноштропными элеваторами типа ЭГ, трубным и стопорными ключами КТМ и КСМ и подкладной вилкой, .В комплект автомата входят сменные части, позволяющие применять автомат для всего сортамента НК.Т, используемых в нефтяной промышленности. Автомат АПР-2ВБ (рис. Ш.9) состоит из следующих узлов: блока автомата, блока электрического инерционного взрывобезопасного привода с реверсивным взрывобезопасным переключателем, клиновой подвески и центратора. Блок автомата представляет собой корпус клинового спайдера с червячным редуктором (червячное колесо, червяк) и водилом, передающим вращающее усилие трубному .ключу. Редуктор защищен кожухом, образующим масляную ванну. Блок автомата крепится к пьедесталу центратора. Клиновая подвеска состоит из направляющей с кольцевым основанием, к которому шарнирно подвешены три клина. Клинья для 48, 60 и 73-мм труб сборные И состоят из корпуса клина и сменных плашек, закрепляемых шплинтами. Клинья для 89 и 114-мм труб монолитные. Для передачи усилия от труб к клиновой подвеске применяют подкладную вилку. Ее подкладывают под муфту очередной поднимаемой трубы в момент ее появления над подвеской. При опускании колонны муфта давит на вилку, подвеска утапливается и клинья захватывают трубу. После этого вилку вытаскивают, трубу отвинчивают, а муфту очередной трубы захватывают и поднимают. Блок центратора для 48, 60, 73 и 89-мм труб состоит из пьедестала, к которому тремя шпильками крепится блок автомата. Внутри центратора фиксатором крепится втулка. Для работ с 114-мм трубами применяют специальный центратор, вкладыш ко- 68 торого имеет форму колодки. Центратор автоматически центрирует колонну труб относительно блока автомата при их спуске и подъеме и предотвращает попадание в скважину каких-либо крупных предметов. Для перемещения клиновой подвески вверх в процессе работы автомата служит балансир с грузом. Блок электропривода с переключателем состоит из взрывобезопасного электродвигателя АСВ-41-4А специального исполнения мощностью 3,5 кВт и инерционного устройства, позволяющего значительно увеличить момент на водиле при отвинчивании труб, а также при завинчивании труб большого диаметра. Инерционное устройство представляет собой маховик, установленный на валу 69 двигателя. Маховик соединяется с валом муфтой. На приводе смонтировано штепсельное соединение, позволяющее присоединить электродвигатель к реверсивному пускателю. Он специальным кабелем с нефтестоикой изоляцией соединяется с промысловой сетью. Пускатель предназначен для запуска, реверсирования и остановки двигателя. Во время работы автомат крепят двумя болтами к фланцу эксплуатационной колонны. Для работы на скважинах, оборудованных бесштанговыми электронасосными установками ЭЦН, применяются специальные автоматы АПР, которые позволяют механизировать свинчивание и развинчивание насосно-компрессорных труб с диаметрами от 48 до 114 мм и обеспечивают надевание хомутов для крепления токонесущего кабеля диаметрами от 27,5 до 34,7 мм на колонну труб при спуске, удержание, освобождение и центрирование колонны труб и снятие хомутов при подъеме колонны труб. Автомат АПР-ГП имеет в отличие от автомата АПР-2ВБ гидравлический объемный привод с питанием от автономной гидравлической станции или от гидравлической системы агрегатов для подземного ремонта скважин; гидропривод обеспечивает стабильность вращающего момента при свинчивании труб, система его регулировки проста. В качестве двигателя используется гидромотор НГТА-64, а вращающий момент регулируется настройкой предохранительного клапана. На основе автомата был создан ряд аналогичных по назначению механизмов, отличающихся типом используемых редукторов, кинематической схемой и т. п. Механический универсальный ключ КМ У предназначен для выполнения тех же операций, что и автомат АПР, но имеет разрезную конструкцию вращателя и спайдера 4 (рис. III.10), что, с одной стороны, упрощает его установку на устье скважины, а с другой — усложняет его эксплуатацию, поскольку условия работы редуктора существенно ухудшаются из-за попадания в него грязи. Ключ состоит из блока вращателя с электроприводом 2, спайдера 4 с блоком клиньев и блока управления электроприводом. Полуавтоматический спайдер состоит из резервного корпуса, сменных блоков клиньев для труб диаметром 60, 73 и 89 мм, рукоятки управления и хомута. К корпусу спайдера приварена стойка 3, на которой устанавливается вращатель. Во время работы спайдер закрепляется на устье скважины. Вращатель представляет собой двухступенчатый редуктор, рабочим органом которого является разрезное колесо с установленным на нем водилом. При совмещении прорезей колеса и корпуса ключ может быть надвинут на трубу и установлен в рабочее положение. Привод ключа электрический, инерционный. Его конструкция предусматривает установку сменных маховиков, что позволяет регулировать максимальный крутящий момент. При работе с ключом КМУ применяют те же элеваторы и ключи, что и при работе с автоматом АПР. 70 . .
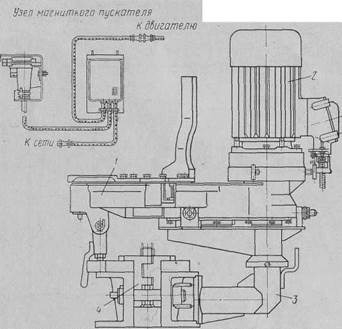
Рис. 111.10. Механический универсальный ключ КМУ |
Последнее изменение этой страницы: 2019-03-20; Просмотров: 388; Нарушение авторского права страницы