
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Нелинейные колебательные процессы в мультистабильных системах
Наряду с динамическими переменными, зависимость которых от времени составляет сущность колебательного процесса, при рассмотрении колебательных систем приходится иметь дело также с параметрами, постоянными во времени, но, от задания которых, может зависеть характер реализующегося в системе режима. Например, качественные изменения колебательных режимов, возникающие при медленном изменении параметров системы, могут приводить к появлению, так называемых бифуркаций. Одной из распространенных проявлений бифуркаций и является возбуждение автоколебаний в нелинейных системах при переходе параметра через критическое, бифуркационное значение амплитуды, например, при плавном увеличении коэффициента усиления колебаний. Чтобы познакомиться с дальнейшими примерами бифуркаций, обратимся к одной из самых простых колебательных систем, представленной шариком в лунке Рисунок 14.3.
Рисунок 14.3 Шарик в лунке в случае одного (а) и нескольких (б) устойчивых положений равновесия. В присутствии трения шарик будет совершать колебания вблизи точки минимума, приходя, в конце концов, в состояние устойчивого равновесия. Можно рассмотреть и более сложный случай и предположить, что профиль лунки имеет более одного минимума, то есть содержит несколько лунок, соответственно увеличится и число устойчивых состояний такой колебательной системы. В зависимости от того, какой была исходная координата и скорость шарика, он попадет в итоге в одну из лунок. В данном случае мы будем иметь дело с колебательной системой, имеющей несколько аттракторов, в качестве которых в данном случае выступают состояния устойчивого равновесия. Если какая-нибудь колебательная система характеризуется наличием нескольких потенциально возможных установившихся состояний или колебательных режимов, то говорят, что имеет место мультистабильность. В линейной системе мультистабильность невозможна. В частности, в данном примере с шариком наличие у профиля нескольких ямок с очевидностью требует, чтобы зависимость возвращающей силы от координаты частицы была нелинейной. Предположим теперь, что форму профиля можно регулировать, изменяя параметры системы, так, что в процессе этой деформации могут появляться или пропадать локальные минимумы. Одно из интересных явлений будет наблюдаться в ситуации, когда ямка, в которой располагается шарик, сближается с локальным максимумом и исчезает. Это бифуркация слияния устойчивого и неустойчивого состояний равновесия. После бифуркации локальный максимум исчезает, и система должна скачком перейти в новое состояние, достаточно удаленное от исходного. Говоря о скачке, мы имеем в виду, что координата частицы претерпит существенное изменение в итоге процесса перехода в новое состояние. Что касается развития этого процесса во времени, то на начальной стадии он будет достаточно медленным, так как локально профиль в области нахождения частицы практически плоский.
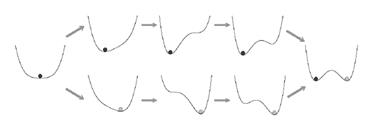
Рисунок 14.4 Скачкообразное изменение состояния равновесия системы «шарик в лунке» при медленном изменении ее профиля Рисунок иллюстрируют как изменяется состояние системы «шарик в лунке» при медленном изменении формы потенциального рельефа. При таком скачкообразном изменении состояния системы говорят о жесткой бифуркации или катастрофе.
Рисунок 14.5 Изменение потенциального рельефа, соответствующее двум траекториям движения по плоскости параметров, приводящим к реализации двух различных состояний устойчивого равновесия В зависимости от того, как выбран путь на плоскости параметров при их медленном изменении, можно прийти в одну и ту же точку области бистабильности, имея результатом разные состояния равновесия. 14.2 Явление стохастического резонанса в нелинейных системах Понятие «стохастический процесс» относится к области хаоса, к беспорядочному поведению, к процессу, динамика которого случайна и непредсказуема. Известным примером такого процесса является броуновское движение. Слово "резонанс" в самом общем смысле означает сильный отклик какой-либо системы на небольшое внешнее воздействие. Важно то, что такой сильный отклик - избирателен, то есть он возникает только при определенных параметрах внешнего воздействия. Резонанс возникает, если частота внешнего воздействия сравнивается с собственной частотой колебаний системы. Вместе же эти два слова означают очень интересное и, на первый взгляд, противоречащее здравому смыслу явление, которое имеет место во многих, совершенно различных системах и даже, как оказывается, уже давно используется природой. Данное явление было открыто в 80-х годах. Суть стохастического резонанса заключается в том, что добавление в систему шума, т.е. хаотического движения, не уменьшает, а наоборот усиливает отклик системы на слабое периодическое воздействие. При этом шум не только не подавляет сигнал, а, наоборот, помогает ему проявиться. Наиболее сильный эффект возникает при некоторой вполне определенной, оптимальной интенсивности шума. Любому, кто сталкивался с проблемой выделения полезного сигнала из шума, кажется очевидным утверждение, что первым шагом в этом процессе является максимально возможное уменьшение интенсивности шума. Еще с тех времен на заре радиотехники, когда инженеры впервые услышали раздающееся из динамиков шипение, они ищут способы подавления шумов, неизбежно возникающих в электрических цепях и коммуникационных системах. Считается, что генерировать шум необходимо лишь в ситуациях, когда требуется не дать кому-то надежно принять полезный сигнал. Идея использовать шум для улучшения качества сигнала кажется абсурдной, ведь ни одному нормальному человеку не придет в голову, например, царапать компакт-диск, чтобы с него стала лучше считываться информация. Однако исследования последних лет позволяют сделать вывод, что в определенных случаях шум может играть конструктивную роль при восприятии слабых сигналов благодаря эффекту, получившему название "стохастический резонанс". Явление оказалось столь необычным, что первое время после открытия оно привлекало внимание очень ограниченного круга ученых, в основном тех, кто его и обнаружил. Термин «стохастический резонанс» был введен в 1981 году в статье R.Benzi, A.Sutera, A.Vulpiani, J. Phys. A14 L453 (1981), в которой авторы исследовали периодичность наступления ледниковых периодов и обнаружили усиление слабого сигнала при наложении шума. В 1983 году это явление было подробно исследовано в триггере Шмитта и потом было открыто во многих физических, химических и биологических системах. Стохастический резонанс – это усиление периодического сигнала под действием белого шума определенной мощности. Является универсальным явлением, присущим многим нелинейным системам, находящимся под внешним воздействием одновременно хаотического и слабого периодического воздействия. Для объяснения данного явления рассмотрим какую-либо бистабильную систему, обладающую диссипацией, трением. Под действием достаточного внешнего воздействия такая система может перейти в другое состояние. Если достаточное внешнее воздействие периодическое, то система, так же, будет периодически переходить из одного состояния в другое. Недостаточное (подпороговое) воздействие не вызовет отклика такой системы. Если внешнее воздействие беспорядочно (шум), то система хаотически «блуждает», и спустя неопределённое время, средняя длина которого зависит от мощности шума, может перескочить из одного положения в другое. Динамика таких скачков будет беспорядочной. Оптимальной (приводящей к максимальному отношению сигнала к шуму) является такая мощность шума, при которой характерное время жизни системы в одном состоянии равно половине периода периодического возмущения. Слишком сильный или слишком слабый шум приводят к меньшей чувствительности системы к слабому периодическому воздействию. Условием для возникновения стохастического резонанса - система должна быть нелинейной, иначе отклик системы на суммарное воздействие будет просто суммой откликов и не приведет ни к каким новым эффектам. Система должна обладать, по крайней мере, двумя стабильными или метастабильными состояниями. Это может быть как бистабильная система, так и система с долгоживущим метастабильным возбужденным состоянием. Рассмотрим для примера какую-либо бистабильную систему. Слова "бистабильная система" - это система с двумя положениями устойчивого равновесия. Простой механический пример - это движение материальной точки в потенциале с двумя минимумами (см. Рисунок1а). Если на частицу действует еще и сила трения, то ясно, что какие бы мы ни выбрали начальные условия, колебания, в конце концов, затухнут, частица "свалится" в одну из потенциальных ям и будет находиться там неограниченно долго.
Рисунок 14.6 Пример поведения бистабильной системы при внешнем на нее воздействии Для того, чтобы частица все-таки попала в другую потенциальную яму, надо приложить внешнюю силу. Если эта сила достаточно велика, то она "вытащит" частицу из первой ямы и перекинет ее во вторую. На языке потенциала (в данном тексте потенциал используется как синоним потенциальной энергии) "приложить внешнюю силу" означает добавить линейно растущий потенциал, как это показано на Рисунок 14.6. Если V(x) - бистабильный потенциал, то внешняя сила должна превосходить величину Таким образом, бистабильная система может обладать неким порогом чувствительности: при внешней силе
а) б) Рисунок 14.7 Сигналы (а) и их Фурье-образы (б).
Стохастический сигнал имеет природу случайного шума. С помощью преобразования Фурье можно отделить периодический сигнал от шума. В рассматриваемой бистабильной системе под действием случайной силой будут происходить случайные колебания. При этом может оказаться так, что частица, блуждая по одной потенциальной яме, вдруг перескочит и во вторую. Очевидно, что чем сильнее шум, тем меньше время перескока, т.е. тем чаще частица перескакивает из одной ямы в другую. Если изобразить зависимость координаты частицы от времени, то получится приблизительно такая картина, как на Рисунок 14.8.
Рисунок 14.8 Отклик системы на случайное внешнее воздействие. Если к внешнему шуму добавить и слабый, подпороговый периодический сигнал, то частица будет по-прежнему скакать из одной ямы в другую, но характер этого процесса изменится: в нем появится периодическая компонента с периодом, равным периоду внешнего слабого сигнала. То есть, перескоки осуществляются за счет случайной силы, а периодическая добавка лишь "модулирует" эффект (т.е. добавляет свою собственную периодичность). Шум как бы устраняет непреодолимый ранее потенциальный барьер и заставляет систему откликаться на подпороговый сигнал. В этом заключается суть стохастического резонанса (усиления). Особенность стохастического резонанса заключается в том, что существует некая оптимальная интенсивность шума, при которой отклик системы на периодический сигнал самый сильный. Для того, чтобы определить, насколько велик этот отклик, нужно построить зависимость координаты частицы от времени и с помощью преобразования Фурье выделить периодическую составляющую сигнала. Тогда амплитуда дополнительного "горба" фурье-образа (Рисунок 14.7) будет служить количественной характеристикой чувствительности системы. Чем выше горб, тем сильнее проявляется внешний периодический сигнал в движении частицы.
Рисунок 14.9 Отклик бистабильной системы при различной интенсивности шума На рисунке показана зависимость координаты частицы от времени при одном и том же слабом периодическом сигнале, но при разных интенсивностях шума. Видно, что когда интенсивность шума мала, частица долго находится в одной потенциальной яме, прежде чем перепрыгнуть в другую (Рисунок 14.9, нижний график). Внешний периодический сигнал здесь никак не проявляется. Когда увеличивается интенсивность шума до оптимальной, частица под суммарным воздействием шума и периодической силы будет синхронно прыгать из одной ямы в другую (Рисунок 14.9, средний график). Явно видна периодическая составляющая отклика системы, период которой совпадает с периодом внешней силы. Наконец, при дальнейшем усилении шума движение частицы станет все более и более хаотичным; периодическая компонента в отклике будет уменьшаться (Рисунок 14.9, верхний график). Типичная зависимость отклика системы от интенсивности внешнего шума показана на Рисунок 14.10. Видно, что при некоторой интенсивности шума отклик системы на полезный сигнал будет максимальным.
Рисунок 14.10 Зависимость от интенсивности шума амплитуд сигналов периодической составляющей Определенной интенсивности шума отвечает вполне конкретное среднее время перескока из одной ямы в другую. Условие для оптимальной интенсивности шума: нужно чтобы вызываемое этим шумом время перескока равнялось половине периода слабого периодического возмущения. Когда период перескока и период внешней силы синхронизированы, возникает наиболее сильный отклик системы на внешнее периодическое возмущение (резонанс). Если эти два процесса не синхронизированы, чувствительность к слабой периодической силе уменьшается. Стохастический резонанс используется в технике, наблюдается и в функционировании живых организмов. Например, стохастический резонанс применяется в оптических системах и возникает при генерации нервных импульсов. В начале 90-х годов было осознано, что стохастический резонанс может играть ключевую роль в нейрофизиологических процессах, а именно, в функционировании нейронных сетей, в передаче импульсов от одной группы нейронов другой. Например, в экспериментах 1991-1993 годов было выяснено, что возникновение нервного импульса в механорецепторных клетках речного рака как раз основано на явлении стохастического резонанса. Благодаря этому, рак может усиками улавливать слабое синхронное колебание воды вокруг себя, несмотря на присутствие разного рода "шумов", и таким образом заранее узнавать о приближении опасности. После этих классических экспериментов хлынул целый поток работ, посвященных роли стохастического резонанса в возникновении и распространении нервных импульсов. Сейчас это уже широко принятая парадигма в биологических и нейрофизиологических науках. Совсем недавно, во второй половине 90-х годов, возник вопрос о возможности существования стохастического резонанса на квантовом уровне. Ожидается, что квантовое "дрожание частиц", которое существует всегда, даже при абсолютном нуле температуры, и которое играет здесь роль шума, будет способствовать детектированию квантового сигнала, распространению информации и т.д. Стохастический резонанс может возникать и в системах, отличных от бистабильных. Главное требование - это наличие какого-либо порога. Примером такой системы может служить система, в которой перескоки происходят не между двумя устойчивыми положениями равновесия, а между "основным" и "возбужденным" состояниями системы. В ближайшем будущем, когда сверхминиатюрная электроника выйдет из научных лабораторий и станет доступной массовому пользователю, стохастический резонанс может оказаться важной ее частью. Например, в 2003 году было обнаружено данное явление в самых перспективных «кирпичиках» наноэлектроники будущего — в углеродных нанотрубках (длинных цилиндрических каркасных молекулах, целиком состоящих из углерода). Транзисторы, выполненные на одной нанотрубке, оказались способны регистрировать более слабые зашумленные сигналы, чем ожидалось. Другой пример дают нейронные сети — электронные устройства, способные эффективно обрабатывать огромные объемы информации. В таких сетях стохастический резонанс будет проявляться в виде улучшенной проводимости зашумленной информации и синхронизации процессов, одновременно происходящих в разных частях сети. В последние годы появился ряд сообщений об успешном использовании стохастического резонанса при обработке сигналов и компьютерном распознавании изображений. |
Последнее изменение этой страницы: 2019-03-22; Просмотров: 71; Нарушение авторского права страницы




 = |V'(x)|, взятой в точке перегиба, т.е. там, где возвращающая сила, создаваемая потенциалом, самая большая. Тогда суммарный потенциал модифицируется так, как показано на рисунке, и частица скатится во вторую яму. Если внешняя сила будет периодична по времени, то в результате частица будет "скакать" из одной ямы в другую и обратно. В результате бистабильная система будет откликаться на сильное внешнее воздействие. При этом частота, с которой система перескакивает из одного устойчивого состояния в другое, совпадает с частотой внешнего воздействия. Если внешнее воздействие очень сильное, то система будет послушно повторять все изменения и колебания этой силы. Если внешнее воздействие окажется не столь сильным, т.е.
= |V'(x)|, взятой в точке перегиба, т.е. там, где возвращающая сила, создаваемая потенциалом, самая большая. Тогда суммарный потенциал модифицируется так, как показано на рисунке, и частица скатится во вторую яму. Если внешняя сила будет периодична по времени, то в результате частица будет "скакать" из одной ямы в другую и обратно. В результате бистабильная система будет откликаться на сильное внешнее воздействие. При этом частота, с которой система перескакивает из одного устойчивого состояния в другое, совпадает с частотой внешнего воздействия. Если внешнее воздействие очень сильное, то система будет послушно повторять все изменения и колебания этой силы. Если внешнее воздействие окажется не столь сильным, т.е.  <
<  , то частица не сможет покинуть яму и останется в ней, несмотря на внешнее воздействие.
, то частица не сможет покинуть яму и останется в ней, несмотря на внешнее воздействие. >
>  система начинает перескакивать из одного состояния в другое с частотой внешней силы, а при
система начинает перескакивать из одного состояния в другое с частотой внешней силы, а при  <
<  система не чувствует внешнее воздействие. То есть, у бистабильной системы существует некий порог чувствительности к внешним воздействиям. Слишком слабые, т.е. подпороговые воздействия остаются для системы незамеченными, но при дополнительном воздействии на такую систему, даже стохастическим сигналом может происходить усиление сверхслабых сигналов.
система не чувствует внешнее воздействие. То есть, у бистабильной системы существует некий порог чувствительности к внешним воздействиям. Слишком слабые, т.е. подпороговые воздействия остаются для системы незамеченными, но при дополнительном воздействии на такую систему, даже стохастическим сигналом может происходить усиление сверхслабых сигналов. 



 t(c)
t(c)