|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ФИЗИЧЕСКИЕ ОСНОВЫ ПОЛУЧЕНИЯ ИНФОРМАЦИИСтр 1 из 60Следующая ⇒
В. Н. Седалищев
ФИЗИЧЕСКИЕ ОСНОВЫ ПОЛУЧЕНИЯ ИНФОРМАЦИИ Ч.1 Генераторные и параметрические Измерительные преобразователи
Учебное пособие
Рекомендовано УМО по образованию в области приборостроения и оптотехники для студентов высших учебных заведений, обучающихся по направлению 200100 «Приборостроение»
Издательство АлтГТУ Барнаул · 2014 УДК 681.5 (075)
Седалищев В.Н., Физические основы получения информации: учебное пособие/Алт. гос. техн. ун-т им. И.И. Ползунова. – Барнаул: Изд-во АлтГТУ, 2014.- Ч.1. Генераторные и параметрические измерительные преобразователи. – 283с.
Учебное пособие содержат описание физических эффектов, принципов построения и особенностей функционирования первичных измерительных преобразователей генераторного и параметрического типов. Пособие предназначено для студентов, изучающих измерительную, информационную технику, автоматику и электронику.
Рецензенты:
А.А. Веряев, д.п.н., профессор кафедры «Информационные технологии» Алтайской государственной педагогической академии;
Б.С. Первухин, д.т.н., гл. инженер ООО «Сибпромприбор-Аналит». Введение В настоящее время темпы накопления информации в области разработки и производства новых типов первичных измерительных преобразователей (датчиков) чрезвычайно высоки. Это сделало необходимым введение нового курса «Физические основы получения информации» в перечень блока фундаментальных дисциплин подготовки бакалавров по направлению 200100 «Приборостроение». Учебное пособие по курсу «Физические основы получения информации», состоит из трех частей: «Генераторные и параметрические измерительные преобразователи», «Колебания и волны в измерительной технике» и «Современные фундаментальные и прикладные исследования в приборостроении». В первой части учебного пособия рассматриваются вопросы анализа и синтеза первичных измерительных преобразователей генераторного и параметрического типов, изложены физические основы функционирования, особенности работы и области практического использования датчиков на их основе. Во второй части отражены особенности реализации колебательных и волновых процессов в измерительных устройствах. В третьей части представлены современные тенденции и направления развития измерительной техники.
Глава 1. Информационно-энергетические основы теории измерений Теория информации не менее значительный шаг в развитии научной мысли по сравнению с технической революцией, произошедшей более 100 лет назад, побудившей науку установить единую сущность различных видов энергии. Информация в переводе с латинского - это разъяснение, осведомление, сведения о чём-либо, обозначение содержания, получаемого от внешнего мира в процессе приспособления к нему. В узкопрактическом смысле – это сведения, являющиеся объектом хранения, передачи и преобразования. Также существуют различные подходы и к ее пониманию: она может быть абсолютной и относительной; естественной и искусственной. Под понятием информации подразумевается функция состояния системы. Теория информации возникла первоначально в ходе решения задач, связанных с разработкой теории передачи потоков сообщений по каналам связи. Сегодня информация – это философская категория наравне с материей и энергией используется для описания процессов в живой и неживой природе. Понятие информации стоит в одном ряду с такими фундаментальными категориями как материя, энергия.
Пьезоэлектричество В 1880-1881 г. братья Кюри открыли и исследовали прямой и обратный пьезоэффект (обратный эффект предсказал Липпман). Кулон предполагал о наличии связи между электрическим зарядом и механической деформацией кристаллов. В течение почти 30 не могли дать теоретического объяснения данного эффекта, и долгое время считали его научным курьезом. В 1890 году Фёдоров установил основные законы кристаллографии, связывающие структуру веществ с их свойствами (теоретически рассчитал все возможные типы кристаллических решеток, ячейки которых обеспечивают минимум потенциальной энергии связи атомов в кристаллах: 7 видов правильных геометрических фигур, 32 класса симметрии, 230 типов кристаллических решёток). Согласно этой теории кристаллы могут быть не центросимметричными, что лежит в основе механизма поляризации в результате их деформации. В разное время проводили теоретические и экспериментальные исследование пьезоэлектричества кварца известные ученые: Беккерель, Иоффе, Курчатов и др. В связи с развитием радиотехники пьезокварцевые резонаторы нашли практическое применение для стабилизации частоты и фильтрации электрических сигналов (1918 г.). Поль Ланжевен использовал пьезоэлементы для эхолокации. В 1940–х годах Шубников теоретически обосновал возможность создания искусственных пьезоэлементов. К настоящему времени разработаны различные типы пьезокерамических материалов, которые находят широкое применение в измерительной технике. Пьезоэлектрическими называются кристаллы и текстуры, электризующиеся под действием механических напряжений (прямой пьезоэффект) и деформирующиеся в электрическом поле (обратный пьезоэффект). Особенностью пьезоэффекта является знакочувствительность, т. е. изменение знака заряда при замене сжатия растяжением и изменение знака деформации при изменении направления поля. Физическую природу пьезоэффекта рассмотрим на примере наиболее известного пьезоэлектрического кристалла — кварца. На рис. (2.2, а) показана форма элементарной ячейки кристаллической структуры кварца. Ячейка в целом электрически нейтральна, однако в ней можно выделить три направления, проходящие через центр и соединяющие два разнополярных иона. Эти полярные направления называются электрическими осями или осями X, и по ним направлены векторы поляризации Р1, Р2 и Р3. Если к кристаллу кварца вдоль оси приложена сила Fх, равномерно распределенная по грани, перпендикулярной оси X, то в результате деформации элементарной ячейки ее электрическая нейтральность нарушается. При этом, как показано на рис. (2.2, б), в деформированном состоянии сумма проекций векторов Р2 и Р3 на ось X становится меньше (при сжатии) или больше (при растяжении) вектора Рт. В результате появляется равнодействующая вектора поляризации, ей соответствуют поляризационные заряды на гранях, знаки которых для сжатия показаны на рис. (2.2б). Нетрудно видеть, что деформация ячейку не влияет на электрическое состояние вдоль оси Y. Здесь сумма проекций векторов равна нулю. Образование поляризационных зарядов на гранях, перпендикулярных оси X, при действии силы по оси X называется продольным пьезоэффектом. При механических напряжениях, приложенных вдоль одной из осей Y (их называют механическими осями), геометрическая сумма проекций векторов Р2 и Р3 на ось Y равна нулю, и на гранях пьезоэлемента, перпендикулярных оси Y, поляризационные заряды не образуются. Однако сумма проекций векторов Р3 и Р2 на ось X оказывается не равной вектору Р1. Так, при сжатии пьезоэлемента, как показано на рис. (2.2, в), указанная сумма превышает Р1 в результате на нижней грани образуются положительные заряды, а на верхней — отрицательные. Рассмотренный эффект образования зарядов на гранях, перпендикулярных нагружаемым граням, называется поперечным.
Рисунок 2.2
При равномерном нагружении со всех сторон (например, гидростатическое сжатие или тепловые напряжения и деформации) кристалл кварца остается электрически нейтральным, так же как и при нагружении по оси Z, перпендикулярной осям X и Y и называемой оптической осью кристалла. Наличие полярных направлений объясняет важность определенной ориентации граней пьезоэлемента относительно кристалло-физических осей кристалла X, Y и Z. Для преобразователей, использующих продольный пьезоэффект, максимальную чувствительность имеет пьезоэлемент, ориентированный относительно кристаллофизических осей так, как показано на рис. (2.2, а) (положение 1 и 3) и называемый Х-срезом. При изменении ориентации всего на 30° (положение 2 на рис. 2.2,а) чувствительность уменьшается до нуля, а срез такого вида называется Y-срезом. Реальный пьезоэлемент может быть вырезан так, что его ребра не совпадут с кристаллофизическими осями, как это и показано на рис. 2.3. При угле φ=3° чувствительность уменьшается на 1,2%, при угле β=3° — на 0,6%.
Рисунок 2.3 Электрострикция Существует явление электрострикции материалов связанное также с изменением геометрических размеров тел под действием электрического поля, но при этом знак деформации не зависит от направления напряжённости электрического поля. Электрострикция – это деформация твердых, жидких и газообразных диэлектриков в электрическом поле, обусловленная их поляризацией и пропорциональная квадрату напряженности электрического поля. Квадратичная зависимость деформации от напряженности поля Е означает, в частности, что знак электрострикции (т.е. расширяется или сжимается вещество в электрическом поле) не зависит от направления поля. В переменном поле в результате электрострикции механические колебания происходят с частотой вдвое большей, чем частота поля. В твердых телах электрострикция выражается квадратичной формулой:
где ulm - компонента тензора деформации; Ei и Ej - составляющие напряженности электрического поля; qijlm - коэффициенты электрострикции; все индексы i, j, l, m принимают значения 1, 2, 3 или соответственно - х, у, z. В газах и жидкостях электрострикцию описывают формулой:
где Электрострикция обусловлена поляризацией диэлектриков в электрическом поле, т.е. смещение под действием поля атомов, несущих на себе электрические заряды (ионы, электрические диполи), или изменением ориентации диполей. Электрострикцией обладают все твердые диэлектрики независимо от их структуры и симметрии, в отличие от пьезоэффекта, который наблюдается только у сред, не имеющих центра симметрии. С другой стороны, создание механических напряжений в веществах, обладающих электрострикцией, но не являющихся пьезоэлектриками, не сопровождается возникновением электрической поляризации и соответственно электрического поля: в средах, обладающих центром симметрии. Однородная деформация, возникающая под действием механических напряжений, вызывает однородное изменение расстояний между зарядами атомов и, следовательно, не приводит к появлению электрического момента, т.е. поляризации. Поэтому, в принципе, электрострикцию можно использовать Количественно электрострикционная деформация твердых тел меньше, чем пьезоэлектрическая. Величина q обусловленной электрострикцией деформации в кристаллах не превышает по порядку величины 3∙10-10. Электрострикция наблюдается в жидкостях, газах, обладающих дипольными моментами. Среди жидкостей наибольшей электрострикцией также обладают дипольные, хотя, в принципе, зависимость плотности от электрического поля имеет место в любой диэлектрической жидкости. Постоянная электрострикции для изотропного вещества согласно термодинамической теории зависит от сжимаемости, плотности и диэлектрической проницаемости среды:
Наличие свободных зарядов (электронов и ионов) не исключает электрострикцию, которая наблюдается не только у чистых диэлектриков, но и у ионизированных газов, электролитов и полупроводников, однако, вследствие экранирования свободными зарядами, поле, действующее на связанные с атомами заряды, оказывается уменьшенным. В сильно проводящих средах, например, в металлах, электрическое поле равно нулю и, следовательно, электрострикция отсутствует. Особую роль играет электрострикция у сегнетоэлектриков, где аномально большой пьезоэффект обусловлен, так называемой, линеаризованной электрострикцией, которая имеет место благодаря наличию в сегнетоэлектриках постоянной, не зависящей от внешнего поля, спонтанной поляризации PS и, следовательно, большого спонтанного внутреннего поля ES, пропорционального PS. При воздействии переменного внешнего поля с амплитудой E ES основную роль в выражении для эффекта электрострикции приобретает компонент с частотой переменного поля и амплитудой, пропорциональной произведению ESE. Напряженность поля ES входит в качестве одного из сомножителей в выражение (2.18), тем самым линеаризуя и усиливая деформацию, возникающую в результате приложения внешнего поля. Данный эффект широко применяется в электрострикционных преобразователях. К достоинствам таких преобразователей можно отнести высокую чувствительность, равномерность частотной характеристики и низкий уровень собственного шума. Электрострикционные преобразователи имеют малую температурную зависимость чувствительности, резонансной частоты, электрического импеданса и т.п. К недостаткам относятся - сравнительная сложность конструкции и необходимость применения согласующих каскадов в непосредственной близости от чувствительного элемента, малая электрическая емкость преобразователя (несколько десятков пикофарад) и большое сопротивление нагрузки. Это исключают возможность присоединения электростикционного преобразователя к усилительному устройству кабелем даже малой длины, т.к. в этом случае чувствительность резко падает в результате того, что емкость микрофона шунтируется емкостью кабеля. В качестве согласующих устройств используются либо катодные повторители на миниатюрных электронных лампах, либо каскады, выполненные на полевых транзисторах. Для увеличения чувствительности электрострикционных преобразователей на неподвижном электроде делают канавки или выемки и повышают поляризующее напряжение U0, однако величина U0 ограничена опасностью электрического пробоя между обкладками конденсатора. Обычно U0 не превышает 250 В. Электрострикционные преобразователи могут работать и без поляризующего напряжения. Это достигается применением в устройствах материалов, несущих на себе постоянный электрический заряд (электреты). Электретная полимерная пленка помещается в зазоре между электродами. Свойства полимерных электретов позволяют обеспечить стабильную работу преобразователей в течение десятков лет при заряде, соответствующем напряжению 150В. В диапазоне звуковых частот чувствительность электрострикционных преобразователей колеблется в пределах 5-50 мВ/Па. При динамическом диапазоне 10-150 дБ. У более высокочастотных электрострикционных преобразователей (известны миниатюрные электрострикционные преобразователи с линейной характеристикой вплоть до 100-140 кГц) чувствительность снижена до 0,5-3 мВ/Па, зато они могут работать в полях со звуковыми давлениями до 174-184 дБ. Разновидностью электрострикционных преобразователей являются акустические зонды, предназначенные для измерений в малых объемах и труднодоступных местах. Для этого служат трубчатые звукопроводы. Такие зонды могут выполняться как обычные конденсаторные микрофоны, но снабжены трубчатыми насадками разной длины и диаметра, либо иметь "бесконечную" длинную линию, обеспечивающую режим бегущей волны в приемной трубке с целью устранения в ней нежелательных резонансов. Электрострикционные преобразователи, предназначенные для измерения колебаний поверхностей твердых тел, устроены, в принципе, аналогично электрострикционным преобразователям для воздушной среды, только подвижным электродом служит сама колеблющаяся поверхность тела, амплитуду колебаний которой необходимо измерить. В таких электрострикционных преобразователях чаще применяется способ измерения амплитуды колебаний, основанный на частотной модуляции. Детектируя полученный высокочастотный сигнал, можно определить частоту и амплитуду колебаний вибрирующей поверхности. Электреты Электреты - это аморфные и поликристаллические диэлектрики, длительно сохраняющие поляризованное состояние после снятия внешнего электрического поля, вызвавшего поляризацию диэлектрика, и создающие электрическое поле в окружающем пространстве. Из этого определения следует, что электрет является поляризованным диэлектриком, точно так же, например, как и поляризованная сегнетокерамика, то есть пьезокерамика. Последняя, однако, состоит из кристаллитов или зерен, которые поляризованы спонтанно, самопроизвольно, в то время как электрет - это диэлектрик, поляризованный внешним полем принудительно и сохраняющий эту поляризацию длительное время. Казалось бы, электрет можно рассматривать как электрический аналог постоянного магнита. Однако на самом деле аналогия эта неполна и формальна, что обусловлено различной природой магнетизма и электрических явлений. Впервые предположение о том, что, подобно постоянным магнитам, в природе должны существовать постоянно поляризованные диэлектрики, высказал в 1896 году английский физик Оливер Хевисайд. Он назвал такие диэлектрики электретами и предсказал некоторые их свойства. Лишь в 1920 году появилось сообщение о первом электрете, изготовленном японским физиком М. Егучи из смеси карнаубского воска, канифоли и пчелиного воска, затвердевающей в присутствии сильного электрического поля. Для получения электретов диэлектрик, помещенный в электрическое поле, подвергают определенному внешнему воздействию, которое способствует процессу миграции заряженных частиц (электронов и ионов). Такими воздействиями могут быть нагревание, освещение, магнитное поле, механическое напряжение, радиоактивное облучение и др. Поэтому в зависимости от способа изготовления различают термоэлектреты, фотоэлектреты, магнитоэлектреты, радиоэлектреты и др. Наибольшее распространение получили термоэлектреты. В основе способа их получения лежит представление о том, что в нагретом до высокой температуры веществе электрическое поле легко поворачивает существующие или создает и ориентирует новые структурные электрические диполи, которые затем замораживаются в ориентированном положении при охлаждении вещества в электрическом поле. Длительное время термоэлектреты изготавливали только из таких органических веществ, как смолы, пчелиный воск, канифоль. В 1953 году были получены первые электреты из полимеров: полиметилметакрилата (плексигласа), нейлона и др. Несколько позднее появились электреты из серы, нафталина, эбонита, и только в 1956 году А.Н. Губкин и Г.И. Сканави получили первые электреты из неорганических несегнетоэлектрических керамических материалов (CaTiO3 , MgTiO3 и др.). Если считать, что электрет получен путем ориентации существующих в материале постоянных электрических диполей в приложенном электрическом поле и охлаждением материала от температуры, при которой диполи свободно вращаются, до температуры, при которой диполи заморожены в тех или иных положениях, то величину остаточной поляризации можно оценить из формулы Дебая для дипольной поляризации. Эта зависимость является приближенной и справедливой только для системы свободных вращающихся диполей, на вид этого выражения будут существенно влиять любые дефекты материала, препятствующие вращению диполей. Измерения поверхностного заряда различных электретов показали, что значения Р для электретов из карнаубского воска составляют величину порядка При такой остаточной поляризации Р внутри электрета создается сильное электрическое поле. Если электрет имеет вид плоской пластины с линейными размерами электродов, много большими, чем расстояние между ними, то поле вне электрета равно нулю. Другое дело, когда толщина и другие линейные размеры электрета не сильно отличаются друг от друга. В этом случае поле вне электрета не везде равно нулю, имеется поле рассеяния, которое у краев образца может достигать значений, соизмеримых с полем внутри электрета. Поэтому часто говорят о способности электрета создавать поле в окружающем пространстве. Большой интерес представляет также электрет с воздушным зазором между одним из электродов и поверхностью диэлектрика, в то время как второй электрод нанесен непосредственно на поверхность электрета. Когда зазор достаточно узок, то на удаленном от поверхности электроде будет индуцирован заряд, поверхностная плотность которого близка к величине Р. В этом случае напряженность поля внутри зазора может достигать больших значений. Здесь также можно говорить о сильном поле, созданном вне электрета. Исследования показали, что поляризация электретов имеет объемный характер. Если разрезать электрет на пластины, перпендикулярные оси остаточной поляризации, то каждая из пластин также будет электретом. Объемный характер поляризации электретов может быть обусловлен как замораживанием электрических диполей по всему объему, так и закреплением смещенных полем ионов в новых энергетически выгодных позициях. Систематическое изучение свойств электретов позволило установить, что в электретах обычно имеются два типа поляризации: один обусловлен гомозарядом, имеющим тот же знак, что и знак заряда на прилегающих электродах, используемых для поляризации, другой вызван гетерозарядом, знак которого противоположен знаку заряда на прилегающих электродах. Гомозаряд создается зарядами у поверхности диэлектрика, которые перешли из металлического электрода или воздушного зазора в поверхностные слои твердого диэлектрика. Гетерозаряд возникает в результате поляризации объема диэлектрика в электрическом поле, при которой происходят ориентация существующих диполей или разделение зарядов и образование диполей. Гомо- и гетерозаряды взаимосвязаны, и изменение одного из них приводит к изменению другого. Результирующий заряд на поверхности диэлектрика определяется алгебраической суммой гетеро- и гомозарядов. Сразу после окончания поляризации преобладает гетерозаряд, а спустя некоторое время, когда тепловое движение разориентирует диполи, преобладающим становится гомозаряд. Опыты показывают, что гомозаряды сохраняются в течение более длительного времени по сравнению с гетерозарядами. Поскольку поляризация электретов индуцирована внешним полем и не является равновесным свойством твердых тел, она будет уменьшаться (релаксировать) со временем. Время релаксации или время жизни t некоторых электретов при комнатной температуре может достигать десятков лет, однако оно сильно зависит от внешних условий, таких, как температура, ионизирующее излучение, влажность и др. На практике определять времена жизни электрета, достигающие нескольких десятков лет, затруднительно, поэтому его оценивают, используя температурную зависимость времени релаксации. Для этого строят зависимость ln t от 1/ Т при повышенных температурах, когда времена релаксации t невелики и легко измеряются в эксперименте, а затем экстраполируют полученную прямую к комнатной температуре и таким образом оценивают время жизни электрета. Оказалось, например, что время жизни пленочного электрета из фторопласта-4 превышает 100 лет, а время жизни электрета из поликарбоната составляет примерно 1000 лет. В настоящее время наибольшее практическое применение находят электреты на основе полимерных пленок политетрафторэтилена, поликарбоната, полиметилметакрилата и др. Их используют для изготовления микрофонов и телефонов с очень широким частотным диапазоном, для бесконтактного измерения скорости вращения и механических вибраций, в качестве дозиметров радиации, пылеуловителей, в ксерографии и электрографии и многих других случаях. Рассмотренные выше примеры практических применений материалов с метастабильной электрической поляризацией показывают, что они весьма перспективны. В ряде технических приложений отсутствует альтернатива диэлектрическим материалам с метастабильной поляризацией, в других случаях эти материалы обладают несомненными преимуществами перед конкурирующими с ними материалами. В то же время следует помнить, что мы схематично коснулись лишь некоторых этапов пройденного пути и малой части важных приложений. Вполне очевидно, что поиск и исследование новых материалов с особыми электрическими свойствами представляют собой одно из важных направлений современной физики твердого тела.
Пироэлектричество Пироэлектрики представляют собой особую разновидность пьезоэлектрических кристаллов и отличаются от собственно пьезоэлектриков тем, что их ячейка имеет одно или несколько взаимно неуравновешенных полярных направлений. Благодаря этому указанные кристаллы поляризуются при всестороннем тепловом расширении, откуда и происходит название «пироэлектрики». Типичным представителем пироэлектриков является турмалин. Сегнетоэлектрики входят в группу пироэлектрических кристаллов. Характерным отличием сегнетоэлектриков является то, что их кристалл разбит на домены, в пределах которых существует упорядоченная структура и свое полярное направление. Однако полярные направления доменов ориентированы по-разному. Такое строение подобно строению ферромагнетиков, поэтому сегнетоэлектрические материалы называют также ферроэлектрическими. Сегнетоэлектрикам присуща нелинейная зависимость плотности поляризованных зарядов от внешних воздействий (механические напряжения, температура и т. д.) и гистерезис. Одни и те же кристаллы в зависимости от температуры могут быть как сегнетоэлектриками, так и линейными кристаллами. Температура, при которой сегнетоэлектрическая структура кристалла преобразуется в структуру линейного кристалла или в другую сегнетоэлектрическую структуру, называется точкой Кюри. Вблизи точки Кюри аномальные свойства сегнетоэлектриков, например высокая поляризация при действии механических напряжений и температуры или очень большое изменение диэлектрической проницаемости ε при действии температуры, проявляются особенно сильно. Типичными представителями сегнетоэлектриков являются сегнетова соль между точками Кюри от —18 до +24 °С и монокристаллический титанат бария, имеющий три точки Кюри: при—80; 0 и +120 °С. Сегнетоэлектрические монокристаллы сравнительно мало используются в измерительной технике из-за относительно низкой стабильности свойств и трудности получения бездефектных монокристаллов. Сегнетоэлектрические пьезокерамики представляют собой продукт отжига спрессованной смеси, состоящей из мелкораздробленного сегнетоэлектрического кристалла с присадками. Пьезоэлектрические свойства они приобретают после поляризации в сильном электрическом поле, направление которого и определяет полярный вектор пьезокерамики (направление поляризации в пьезокерамике обычно обозначают осью Z). В настоящее время сырьем для производства пьезокерамики наряду с титанатом бария с точкой Кюри +120° С служат титанат свинца РЬТi3 с точкой Кюри около +500 °С и цирконат свинца PbZrO3 с точкой Кюри примерно +230 °С. Наилучшие результаты получаются при использовании смесей этих материалов — так называемых цирконато-титанатов свинца (керамики типа ЦТС), которые получили сейчас самое широкое распространение, так как, обладая такой же чувствительностью, как и ВаТiO3, они обеспечивают работу преобразователя в температурном диапазоне до 200—250 °С. Природный материал – пьезокварц – обладает менее выраженными пьезоэлектрическими свойствами, но более стабилен при воздействии температуры и других факторов. Пьезокерамика обладает большим пьезоэффектом, но её свойства сильно зависят от температуры, есть старение во времени. Поэтому пьезокварцевые преобразователи используют для создания измерительных устройств с частотным выходом, а пьезокерамические – для амплитудных датчиков. Пьезокерамику получают путём спекания спрессованной смеси, состоящей из мелкораздробленных, мелкодисперсных сегнетоэлектрических кристаллов с присадками (свинец, титан). У сегнетоэлектриков кристаллы разбиты на домены, в пределах которых существует упорядоченная структура, что обуславливает определенное направление их спонтанной поляризации. При изготовлении пьезокерамики направления поляризации доменов распределены равномерно, поэтому суммарного электрического поля не создается. При спекании смеси к образцу прикладывается сильное внешнее электрическое поле, содействующее ориентации доменов в определенном направлении. После снятия внешнего поля и охлаждения пьезоэлемента домены удерживаются в заданном направлении. Содержание ориентированных доменов в образце не превышает 7-10% от их общего числа. Под действием внешнего электрического поля напряженностью в десятки киловольт на сантиметр относительные деформации пьезоэлемента составляют сотые доли процента. Для нелинейных диэлектриков зависимость электрического смещения от напряженности электрического поля принимает вид петли гистерезиса. Наличие гистерезиса является причиной низкой добротности резонаторов из таких пьезоматериалов.
Рисунок 2.14 Петля гистерезиса для сегнетоэлектрика.
Одним из широко применяемых в последнее время пьезоэлектрических материалов является также лантан галлиевый силикат (лангасит), представляющий собой кристалл, обладающий уникальным сочетанием физических свойств, обеспечивающим применением его в пьезотехнике. С точки зрения физических свойств лангасит не может быть отнесен ни к пироэлектрикам ни к сегнетоэлектрикам. Это связано с тем, что по своим характеристикам лангасит занимает промежуточное положение в ряду других известных пьезоэлектрических материалов, таких как ниобат лития, танталат лития и кварц. Он перекрывает собой те области применения, где использование других традиционных материалов по ряду характеристик не эффективно. Лангасит имеет меньшую, по сравнению с кварцем, ниобатом лития и танталатом лития анизотропию коэффициентов линейного расширения, что является важным свойством для высокотемпературных применений. Пьезоэлектрические подложки на основе кристаллов лангасита используются для изготовления ПАВ-датчиков (датчики на поверхностных акустических волнах), а также фильтров, резонаторов и других пьезоэлектрических приборов, использующих объемные акустические волны (ОАВ). Кристаллы лангасита выращиваются вдоль осей <001>, <011> и <110>. Пьезоматериалы, которые используются в качестве подложек для ПАВ-приборов, имеют два наиболее важных параметра: · скорость распространения ПАВ и ее температурная зависимость; · коэффициент электромеханической связи.
2.6.2 Применение пироэффекта Суть данного эффекта заключается в появлении электрического заряда на поверхности кристалла при изменении его температуры. Впервые это явление исследовали Эпинус в 1756г., Брюстер в 1824 г. и др. Выделяют два механизма поляризации кристаллов при изменении их температуры: векториальное пироэлектричество и тензориальное. В первом случае заряды гранях кристалла появляются в результате поворота доменов в сегнетоэлектриках (нелинейный эффект), а во втором случае в результате смещения ионов, как следствие асимметрии кристаллов (линейный эффект):
где S – площадь обкладки на поверхности пьезоэлемента.
Таблица 2.2
Рисунок 2.15 Температурные зависимости пироэлектрического коэффициента для линейных (1,2) и нелинейных (3) пироэлектриков. Причина появления доменов в сегнетоэлектриках связана с уменьшением полной энергии системы кристалл – окружающее его электрическое поле. То есть, при однородной по всему кристаллу поляризации на его поверхностях возникают связанные электрические заряды, которые создают деполяризующее поле, наличие которого приводит к появлению дополнительной положительной энергии. При разбиении кристалла на домены происходит уменьшение этой энергии, поскольку пространственная протяженность электрического поля уменьшается вследствие замыкания электрических силовых линий непосредственно вблизи поверхности кристалла. Процесс разбиения кристалла на домены заканчивается, когда уменьшение энергии электрического поля скомпенсируется положительным вкладом энергии доменные границы – пограничные слои между доменами.
Рисунок 2.16 Зависимость пространственной протяженности деполяризующего электрического поля при возникновении доменной структуры в сегнетоэлектриках. Термодинамический анализ пироэлектрического эффекта показал, что кристалл пироэлектрика обладает еще одним свойством: его температура обратимо изменяется при наложении внешнего электрического поля. Этот эффект называется электрокалорическим, и его величина также определяется пироэлектрическим коэффициентом:
где – Е – напряженность электрического поля; с – теплоемкость кристалла.
Рисунок 2.17 Температурная зависимость спонтанной поляризации и пироэлектрического коэффициента для сегнетоэлектриков. Таким образом, физические эффекты в кристаллах нельзя рассматривать изолированно друг от друга, так как под действием одних и тех же внешних сил в кристалле всегда возникает несколько явлений. Например, приложение механических сил приводит не только к деформации кристалла, но и вызывает его электрическую поляризацию; внешнее электрическое поле не только поляризует диэлектрик, но также приводит к его механической деформации. Различные эффекты проявляются одновременно и сложным образом взаимодействуют между собой. Коэффициенты характеризуют различные свойства кристаллов и зависят от условий, в которых они измеряются. Например, механические свойства веществ зависят от электрических и тепловых условий, в которых они находятся, а электрические свойства – от тепловых и механических условий и т.д. Поэтому математические уравнения должны учитывать всю совокупность механических, электрических и тепловых явлений в кристаллах: упругость, прямой и обратный пьезоэффекты, тепловое расширение, теплоемкость, пироэлектрический эффект, пьезокалорический эффект (изменение энтропии под действием механических напряжений), электрокалорический эффект (изменение энтропии под действием электрического поля). Пироэлектрический эффект проявляет себя достаточно сильно в пьезокерамических материалах (преобладает векториальная составляющая), что позволяет создавать на их основе высокочувствительные измерительные преобразователи тепловых потоков.
Рисунок 2.18 Принцип работы пироэлектрического приемника инфракрасного излучения К числу преимуществ пироэлектрических приемников излучения относятся: · широкий спектр регистрируемого излучения, · высокая чувствительность, · высокое быстродействие, · способность к работе в области повышенных температур. Перспективно применение пироэлектрических приемников в области ИК – диапазона. Их используют для детектирования излучения малой мощности, для измерения сигналов лазерного излучения, для высокочувствительного контактного и бесконтактного измерения температуры объектов (порог чувствительности достигает Особый интерес вызывает возможность использования пироэлектрических преобразователей для индикации пространственного распределения излучений в системах визуализации ИК – изображений (темновидение). В настоящее время уже созданы пироэлетрические видиконы. Принцип их работы основан на том, что изображение теплового объекта проецируется на мишень, создавая на ней соответствующий зарядовый и потенциальный рельеф, который считывается при сканировании мишени электронным лучом.
Примеры применения термоэлектрических эффектов в измерительной технике В основе широко применяемого в практике термоэлектрического эффекта лежит явление, исследованное А. Вольта (1797 г.). Экспериментально было установлено, что при контакте двух разнородных металлов между ними возникает разность электрических потенциалов, являющаяся функцией температуры материала:
Существует ряд (Вольта) для металлов, в котором следующее вещество заряжается положительно по отношению к предыдущему (алюминий, цинк, олово, кадмий, свинец и т.д). История открытия термоэлектрических явлений насчитывает уже более 180 лет. Практическое использование они получили только в середине XX века, то есть спустя 130 лет после открытия и в первую очередь благодаря работам советского академика А.Ф. Иоффе. Начало же положил немецкий ученый, уроженец г. Ревеля (в настоящее время г. Таллин), Зеебек (Seebeck) Томас Иоганн (1770-1831). В 1822 году он опубликовал результаты своих опытов в статье "К вопросу о магнитной поляризации некоторых металлов и руд, возникающей в условиях разности температур", опубликованной в докладах Прусской академии наук. Зеебек обнаружил, что при замыкании концов цепи, состоящей из двух разнородных металлических материалов, спаи которых находились при разных температурах, магнитная стрелка, помещенная вблизи этой цепи, поворачивалась так же, как в присутствии магнита. Угол поворота стрелки был связан с величиной разности температур на спаях исследуемой цепи. В физике данное явление известно, как "эффект Зеебека". Однако, несмотря на то, что двумя годами ранее в 1820 году Эрстед (Ersted) Ханс Кристиан (1777-1851), доказал влияние электрического тока на магнитную стрелку, а вслед за этим работами Ампера, Био, Савара, Лапласа и других ученых было детально исследовано взаимодействие электрических токов и магнитных полей, Зеебек категорически отрицал электрическую природу данного явления. Как видно из названия статьи, его объяснение сводилось к намагничиванию материалов под воздействием разности температур. Интересно, что по его гипотезе весь земной шар представлял собой подобие гигантской цепи, в которой разница температур поддерживается полюсами холода и высокотемпературной экваториальной частью планеты. По крайней мере, именно в этом Зеебек усмотрел природу земного магнетизма. Первым, кто употребил термин "термоэлектрическое явление" был Х. Эрстед, внимательно следивший за работами Зеебека. Однако сам Зеебек настаивал на другой формулировке - "термомагнетизм". Зеебек накопил огромный экспериментальный материал по изучению цепей из комбинаций твердых, жидких металлов, сплавов и соединений при воздействии на них разных температур. Это позволило ему создать термоэлектрический ряд, который до сих пор представляет интерес и не сильно отличается от рядов, составленных гораздо позднее Юсти (1948 г.) и Мейснером (1955 г.). Через 12 лет (1834 г.) после открытия Зеебека был открыт "эффект Пельтье". Этот эффект является обратным "эффекту Зеебека". Суть "эффекта Пельтье" состоит в том, что при прохождении тока на границах дух разных проводников происходит на одном конце поглощение тепла, а на другом его выделение. Открыл это явление французский физик, метеоролог Пельтье (Peltier) Жан Шарль Атаназ (1785-1845). Кстати, увлечение физикой было своего рода хобби этого человека. Ранее он работал часовщиком фирмы А.Л. Бреге, но благодаря полученному в 1815 г. наследству, Пельтье смог посвятить себя экспериментам в области физики и наблюдению за метеорологическими явлениями. Как и Зеебек, Пельтье не смог правильно интерпретировать результаты своего исследования. По его убеждению полученные результаты служили иллюстрацией того, что при пропускании через цепь слабых токов универсальный закон Джоуля - Ленца о выделении тепла протекающим током не работает. Только в 1838 г. петербургский академик Ленц Эмилий Христианович (1804-1865) доказал, что "эффект Пельтье" является самостоятельным физическим явлением, заключающимся в выделении и поглощении на спаях цепи добавочного тепла при прохождении постоянного тока. При этом характер процесса (поглощение или выделение) зависит от направления тока. Двадцать лет спустя Уильям Томсон (впоследствии - лорд Кельвин) дал исчерпывающее объяснение эффектам Зеебека и Пельтье и взаимосвязи между ними. Полученные Томсоном термодинамические соотношения позволили ему предсказать третий термоэлектрический эффект, названный впоследствии его именем. Эффект Томсона заключается в переносе теплоты током, протекающим через однородный материал, в котором создан градиент температуры. Количество переносимой теплоты пропорционально величине этого градиента и силе протекающего тока. Данные открытия положили основу развития самостоятельной области техники - термоэнергетики, которая занимается как вопросами прямого преобразования тепловой энергии в электрическую (эффект Зеебека), так и вопросами термоэлектрического охлаждения и нагрева (эффект Пельтье). В основе физики термоэлектричества лежит теория энергетического состояния электронов внутри металлов. Для описания явления используют понятие уровня Ферми (значение полной энергии свободных электронов). Электроны перемещаются до тех пор, пока не будет скомпенсирована разность уровня Ферми разностью потенциалов, появляющейся в области контакта. Энергия Ферми зависит от анизотропии кристаллов (проявление нелинейности материала). Действие термоэлектрических термометров основано на эффекте Зеебека. Зеебек обнаружил, что если в замкнутой цепи из двух разнородных металлов спаи поддерживаются при различных температурах, то в этой цепи течет электрический ток (благодаря возникновению постоянной ЭДС, обусловленной термическими причинами – термоэлектродвижущей силы). Эффект Зеебека широко используют для измерения тепловых величин. Кроме этого, если создать хороший тепловой контакт одной группы спаев термобатареи с каким-либо источником теплоты, например небольшим количеством радиоактивного вещества, то на выходе термобатареи будет вырабатываться напряжение. КПД преобразования тепловой энергии в электрическую в таких термоэлектрических генераторах достигает 16 – 17% (для паротурбинных электростанций тепловой КПД составляет 20 – 40%). Термоэлектрические генераторы находят применение в удаленных точках на Земле (например, в Арктике) и на межпланетных станциях, где от источника питания требуются большая долговечность, малые размеры, отсутствие движущихся механических деталей и пониженная чувствительность к условиям окружающей среды. Полупроводники в большей степени, чем металлы, подходят для изготовления термобатарей, от которых требуются большие термо-ЭДС либо интенсивное термоэлектрическое нагревание или охлаждение.
Рисунок 2.25
Термоэлектрический эффект (Зеебека) используется для создания термопар, широко применяемых в практике для измерения температуры различных сред. При этом температуру холодного спая поддерживают постоянной, или компенсируют. Достоинство термопар:
· Недостатки:
При подключении термопар применяют специальные компенсационные провода с соответствующей расцветкой жил. При измерении быстропеременных температур необходимо учитывать наличие тепловой инерционности термопар. В промышленности широко используют термопары типа ТХК, ТХА, ТПП, ТПР, ТВР и др. Для измерения низких температур используют сплав серебра с кобальтом и медь. Чем тоньше провода, тем ниже максимальная рабочая температура и срок службы термопар, так как при высоких температурах происходят изменения структуры материала в приповерхностном слое. При эксплуатации термоэлектрических устройств необходимо учитывать наличие следующих составляющих погрешности измерений: · методическая погрешность - возникает из-за непостоянства температуры холодного спая термоэлемента; · инструментальная погрешность – возникает из-за непостоянства параметров электрической измерительной цепи; · погрешности, обусловленные генерацией в измерительной цепи паразитными термо-ЭДС; · погрешности, обусловленные электростатическими и электромагнитными наводками. Для устранения влияния на результат измерений материала соединительных проводов используются термокомпенсационные провода. Они выполняются из специальных материалов, которые при соединении с термопарой не дают паразитную ЭДС. Для устранения влияния непостоянства температуры холодного спая используют специальные методы измерения, в основе которых лежит термостабилизация холодных спаев или термокомпенсация изменения температуры холодных спаев (рис. 2.26).
Рисунок. 2.26 Схема включения термоэлектрического преобразователя. RП – сопротивление проводов; RT – сопротивление термопреобразователя; Rg – дополнительное сопротивление; Rt – термокомпенсационное сопротивление; RR – сопротивление рамки гальванометра. Эффект Холла В основе датчиков ЭДС Холла лежит явление искривления пути носителей заряда в полупроводниках, находящихся в магнитном поле. Это явление впервые было открыто американским физиком Эдвином Холлом в 1876 г. Рассмотрим прямоугольную пластину полупроводника с электропроводностью n-типа, расположенную, как показано на рис. 2.31, а. В направлении оси х протекает ток
где е - заряд электрона; mn - подвижность электронов. Эта сила направлена перпендикулярно как направлению магнитного поля, так и направлению тока (вдоль оси Z, рис. 2.31). Поэтому электроны смещаются перпендикулярно направлению их первоначального движения. При условиях, показанных на рис. 2.31, на зажиме А должен быть отрицательный потенциал относительно зажима Б, так как верхняя поверхность полупроводника, к которой отклоняются электроны, будет заряжаться отрицательно, а противоположная поверхность - положительно. Заряды создают в пластине поперечное электрическое поле, названное по имени ученого полем Холла. Процесс образования объемных зарядов у поверхностей прекратится лишь тогда, когда напряженность поля Холла будет полностью компенсировать действие на электроны силы Лоренца. Условие равенства сил, действующих на электрон со стороны электрических и магнитных полей, может быть записано в виде
откуда может быть определено поле Холла
или э. д. с. Холла
где d — толщина пластины (рис. 2.31, б). Протекающий через образец с шириной b и сечением S ток плотностью jx, обусловленный действием электрического поля, связан с концентрацией и скоростью электронов соотношением:
Решая совместно уравнения (2.38) и (2.39), получим
где Rx=1/en - коэффициент Холла, связывающий поперечную разность потенциалов с индукцией магнитного поля. Величина его зависит от материала пластины, содержания примесей и температуры. Из выражения (6) следует, что величина ЭДС Холла зависит от физических свойств материала пластины, от ее размеров, а также, от величины протекающего через нее тока и от воздействующего на этот ток магнитного поля. Если пластина имеет электропроводность p-типа, то основная часть тока создается дырками, движущимися слева направо, тогда в левой части уравнения (2.47) следует поставить знак плюс. Траектории дырок в этом случае будут смещаться вверх, верхняя поверхность будет накапливать положительный заряд и ЭДС Холла будет положительной. Вывод выражения для ЭДС Холла сделан без учета хаотического теплового движения электронов и их распределения по скоростям. Более строгий расчет дает формулу для коэффициента Холла в полупроводнике с электропроводностью n-типа и р-типа:
Для полупроводников, имеющих собственную электропроводность или содержащих носители заряда обоих типов в сравнимых концентрациях, коэффициент Холла описывается выражением
Если концентрации электронов и дырок в образце равны и равны их подвижности, то ЭДС Холла будет равна нулю, так как направление движения дырок противоположно направлению движения электронов и электроны и дырки будут смещаться магнитным полем в одну и ту же сторону. В действительности в полупроводниках подвижность электронов больше подвижности дырок, поэтому в собственном полупроводнике ЭДС Холла соответствует по знаку электронному образцу. При переходе от собственной электропроводности к дырочной ЭДС Холла проходит через нуль и изменяет знак.
Контактные преобразователи Контактными называются измерительные преобразователи, в которых измеряемое механическое перемещение преобразуется в замкнутое или разомкнутое состояние контактов, управляющих электрической цепью. Таким образом, естественной входной величиной контактных преобразователей является пространственное перемещение. Простейший контактный преобразователь является однопредельным и имеет одну пару контактов (рис.3.1а), замыкание которых происходит в функции измеряемого перемещения, например изменения размера изделия 1. При увеличении размера изделия переместится шток 2, и укрепленный на нем контактирующий элемент 3 войдет в соприкосновение с контактом 4. При этом активное сопротивление между контактами 3 и 4 изменится от бесконечности до малой величины, определяемой значением контактного сопротивления. При контроле размеров чаще всего используются двухпредельные контактные преобразователи с двумя парами контактов (рис.3.1б). Встречаются конструкции многопредельных преобразователей с несколькими парами контактов (рис.3.1в); контакты могут быть расположены как с обеих сторон контактирующего элемента, так и с одной его стороны. Контактные преобразователи могут работать либо на замыкание (или размыкание) всей цепи, либо на замыкание (размыкание) участка цепи (рис.3.1г).
Рисунок 3.1 Основные типы контактных преобразователей
Конструктивно измерительный шток закрепляют на плоских пружинах (рис.3.2а) или помещают в цилиндрические направляющие (рис.3.2б). С точки зрения точности работы преобразователя оба способа закрепления щитка равноценны, однако при применении цилиндрических направляющих требуется защита от загрязнения и создание дополнительного устройства, предотвращающего поворот щитка.
Рисок 3.2 Способы крепления штока контактного преобразователя Для повышения чувствительности преобразователя и облегчения настройки неподвижных контактов часто применяют рычажную передачу, увеличивающую перемещение контактирующего элемента по сравнению с перемещением штока преобразователя. Крепление рычага целесообразнее всего осуществлять на крестообразно расположенных плоских пружинах (рис.3.2б). При таком креплении отсутствует сухое трение. Ось вращения рычага проходит по линии пересечения пружин. Контакты в преобразователях обычно имеют сферическую поверхность (часто один из контактов – плоский). У подобных контактов контактная точка образуется близко к центральной точке сферической поверхности контакта и по мере износа превращается в небольшую площадку круглой формы. Контакты являются наиболее ответственной частью преобразователя. Материал, конструкция и выполнение контактов, а также режим их работы, определяют как точность, так и надежность и стабильность работы преобразователя во времени. Особенно опасен для контактов такой режим работы, при котором между контактами возникает электрическая дуга. Дуга может появиться при размыкании контактов или пробое (при их сближении), если ток и напряжение между контактами больше некоторых значений I0 и U0, определенных для каждого из контактных материалов. Например, для серебра и меди значения I0 и U0 равны примерно 0.4А и 13В соответственно, для платины и вольфрама 0.9А и 17В, а для сплава платины и иридия 0.74А и 20В. Если ток между контактами меньше тока I0, то возникает искра. Для уменьшения мощности искры или дуги применяют цепи искрогашения, например, шунтируют контактный промежуток цепью из последовательно соединенных конденсатора и активного сопротивления (рис. 3.1а). В результате образования дуги (или искры) между контактами происходит износ контактов (эрозия). Однако эрозия возможна и при отсутствии дуги или искры. При весьма малых расстояниях между контактами (меньших длины свободного пробега электрона) между ними создается электрическое поле значительного градиента (при напряжении 10В и расстоянии между контактами 1мкм градиент поля равен 10000В/мм). Электроны, вырываемые из «катода» этим полем, бомбардируют «анод», разрыхляют его, вследствие чего ионы анода переносятся на катод; на катоде образуется выступ, а на аноде – углубление. При медленном размыкании контактов наблюдается возникновение металлических мостиков из материала анода. Разрушение контактной поверхности может произойти также вследствие коррозии, т.е. образования оксидных, сульфидных и других пленок на контактах. В частности, образованию коррозии способствуют химические реагенты, выделяющиеся из некоторых изоляционных материалов. Так, при применении в конструкции преобразователя деталей из резины и эбонита, содержащих серу и сернистые соединения, происходит коррозия серебряных контактов. При применении деталей из текстолита и гетинакса, содержащих свободный фенол, возникает коррозия контактов из вольфрама. Поэтому следует критически относиться к выбору изоляционных материалов, используемых в преобразователе, отдавая предпочтение керамике. Уменьшения влияния эрозии можно добиться соответствующим выбором материала контактов, расстояния между ними и электрических параметров цепи, замыкаемой контактами. Во избежание образования дуги или искры мощность, разрываемой контактами, не должна превосходить 100-150 мВт. Поэтому при применении в качестве сигнального, измерительного или исполнительного элемента устройств, потребляющих мощность меньше 100-150 мВт, их можно включать непосредственно в цепь контактов преобразователя. Если же эти элементы потребляют большую мощность, то их включают через усилители (релейные, полупроводниковые, ламповые и др.).
Реостатные преобразователи Реостатным преобразователем называют реостат, движок которого перемещается под действием измеряемой неэлектрической величины. Естественной входной величиной реостатных преобразователей является перемещение движка, а выходной – сопротивление. На рис. 3.4 показано устройство реостатного преобразователя. На каркас 1 из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса зачищается, и по металлу проволоки скользит щетка 3. Добавочная щетка 5 скользит по токосъемному кольцу 4. Обе щетки изолированы от приводного валика 6.
Рисунок 3.4 Устройство реостатного преобразователя
Реостатные преобразователи выполняются как с проводом, намотанным на каркас, так и реохордного типа. Чаще всего используется провод из различных сплавов платины, обладающих повышенной коррозионной стойкостью и износостойкостью; применяется также манганин, константан, фехраль. Микропровод позволяет выполнять миниатюрные преобразователи, имеющие габариты до 5х5 мм. Каркас выполняется из керамических материалов, пластмассы, гетинакса, металлов (алюминий, дюраль), покрытых слоем лака или оксидной изоляцией. Каркас должен обладать большой теплоотдачей. Обмотку выполняют из эмалированного или оксидированного провода с последующим покрытием лаком. Следует выбирать материалы проволоки и каркаса так, чтобы их температурные коэффициенты расширения отличались бы незначительно. В противном случае изменение температуры преобразователя может привести к распусканию обмотки или к появлению недопустимых напряжений. Токосъемные щетки выполняют в виде проволок или лент из бронзы, платиноиридиевого сплава и других упругих материалов или в виде ролика. Последний ставят с некоторым перекосом для обеспечения небольшого скользящего трения и зачистки контактной дорожки. В жидкостных реостатах подвижным элементом является ртуть. Вид статических характеристик реостатных преобразователей определяются следующими зависимостями:
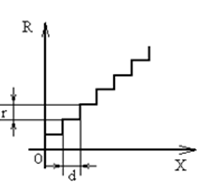
где: RS - полное сопротивление реостата, Rab – сопротивление реостата, соответствующее перемещению движка на расстояние ab, W – число витков обмотки (обычно W составляет 100-200, а в прецизионных преобразователях – десятки тысяч), d – диаметр провода обмотки, r - удельное сопротивление провода, h и s - высота и ширина каркаса, Xmax – максимально возможное перемещение подвижной части, Uсети - напряжение сети. Согласно формулам (3.2 - 3.4) чувствительность преобразователей можно увеличить за счет увеличения W, увеличения h и d, уменьшения d, использования проводов обмоток с большим удельным сопротивлением r. Реостатные преобразователи аналогично контактным являются ступенчатыми (дискретными) преобразователями (за исключением преобразователей реохордного типа), поскольку непрерывному изменению входной величины соответствует ступенчатое изменение сопротивления. Реальная статическая характеристика реостатных преобразователей имеет ступенчатый характер (рис.3.5). И поэтому при увеличении габаритов h и d происходит увеличение погрешности из-за ухудшения разрешающей способности, т.е. минимального значения входной величины, изменение которой вызывает изменение входной величины. Это обстоятельство вызывает погрешность квантования, уменьшающуюся при увеличении числа витков W преобразователя (при уменьшении диаметра обмотки d). При уменьшении диаметра провода обмотки d одновременно улучшается разрешающая способность преобразователя. Отсюда следует, что основные пути увеличения чувствительности: уменьшение d и увеличение r. Рисунок 3.5 Вид ступенчатых характеристик реостатных преобразователей. Источники основной погрешности: - загрязнение контактной пары щетка-провод и ее окисление; - стирание контактной поверхности; - гистерезис щетки преобразователя вследствие нежесткого ее крепления; - температура внутреннего нагрева.
Источники дополнительной погрешности: погрешность квантования · влияние внешних магнитных полей на преобразователи с выходным током и напряжением, заключающееся в наведении дополнительной ЭДС в обмотке; · колебание частоты питающей сети; · колебание напряжения Uсети; · влажность воздуха; · изменение величины контактного сопротивления при изменении скорости перемещения подвижной части, которое может достигать значительных величин; · вибрация, которую уменьшают путем выполнения волосков щетки разной длины (это приводит к различным собственным частотам колебаний). · влияние внешней температуры на размеры h, d, d и удельное сопротивление r. Суммарная погрешность, вызванная непостоянством параметров преобразователей составляет 0,05-0,1%. Температурная погрешность обычно не превышает 0,1% на 10 градусов.
Тензорезистивный эффект Механизм чувствительности тензорезистивных преобразователей основан на реализации функциональной зависимости активного сопротивления проводника от величины механических напряжений и деформаций, создаваемых в нем измеряемым воздействием. При этом могут изменяться как геометрические размеры, так и удельное сопротивление проводника.
где Для твердых тел Относительное изменение сопротивления проводника при воздействии на него механическим усилием будет в большей степени определяться изменением геометрических размеров чувствительного элемента, и в гораздо меньшей степени будет зависеть от изменения электропроводности материала.
где
Применение тензорезисторов При измерении упругих деформаций наклеиваемый тензорезистор располагается на детали в направлении главной (измеряемой) деформации. В пределах упругих деформаций тензорезисторы характеризует небольшое относительное изменение сопротивления. Небольшие приращения сопротивлений тензорезисторов необходимо преобразовать в большие относительные изменения выходных электрических величин. Чаще всего измерительной цепью является делитель напряжения либо мостовая цепь.
Рисунок 3.11 Измерительная схема тензорезистора с использованием делителя напряжения Делитель напряжения с питанием постоянным током (рисунок 3.11) применяют лишь в том случае, когда интересуются только переменной состовляющей измеряемой величины, при этом постоянная состовляющая падения напряжения на сопротивлении Rп тензопреобразователя, в сотни раз превышающая переменную состовляющей, отфильтровывается разделительным конденсатором С. Во всех других случаях в качестве измерительной цепи используется цепь моста, питаемого постоянным или переменным током.
Рисунок 3.12 Мостовая измерительная схема тензодатчика
Схема простейшего моста содержит R1, R2, R3, R4 – резисторы отдельных плеч моста; источник питания U, характеризуемый внутренним сопротивлением Ri; электронный вольтметр V. Источник питания подключён к так называемой диагонали питания, вольтметр – измерительной диагонали. Тензорезистор, воспринимающий деформации, включают в одно из плеч. Состояние моста характеризует напряжение на измерительной диагонали. Напряжение между точками а и б В исходном состоянии мост уравновешен. Положив Uоб=0, получим условие равновесия моста Под действием деформации сопротивление тензометра изменяется, что можно представить как приращение резистора. Чувствительность мостовой схемы в неравновесном режиме оценивается отношением где R1=R и R2=nR. Из этого выражения следует, что чувствительность неравновесного моста не зависит от величин и соотношения между сопротивлениями R3 и R4, а значит и от того выполнено условие равновесия или нет. Под действием деформации сопротивление активного тензометра R1 изменяется на величину ∆R, мост разбалансирован и на измерительной диагонали появляется напряжение разбалланса. Для равновесного режима характерно то, что мост приводится в состояние равновесия изменением величины сопротивления одного из соседних плеч, например приращением резистора R2 на величину ∆R2. Для этого в соседнее плечо включают образцовую регулируемую меру сопротивления. Условие равновесия с учётом изменения R1 на ∆R1, и R2 на ∆R2 выражено соотношением. Отношение R3/R4 называют отношением плеч моста. По своей сути это масштабный коэффициент. Процесс уравновешивания может выполнятся оператором (ручное уравновешивание) или автоматически в замкнутых структурах. Для равновесного режима использования моста характерны: · отсутствие требований к стабильности питания моста; · требование высокой чувствительности прибора, включаемого в измерительную диагональ; · высокая точность измерения, в основном определяемая точностью образцовой регулируемой меры; · линейность преобразования. К недостаткам следует отнести: низкое быстродействие, относительно высокую сложность автоматических устройств уравновешивания. На точность измерения деформаций и напряжений тензорезисторами большое влияние оказывает изменение температуры. Однако мостовая цепь позволяет довольно легко исключить температурные погрешности. С этой целью в соседнее с датчиком плечо моста включается второй тензорезистор, также расположенный на детали, но в таком направлении, что измеряемая деформация не изменяет его сопротивления. В некоторых случаях преобразователи можно разместить на детали так, что они будут находиться при одинаковой температуре, но испытывать деформации разного знака. При этом наряду с термокомпенсацией в два раза повышается чувствительность преобразования.
Магниторезистивный эффект Суть эффекта заключается в изменении удельного сопротивления проводника или полупроводника при внесении его в магнитное поле:
Эффект обусловлен появлением дополнительной составляющей полного сопротивления резистора за счет повышения частоты столкновений свободных зарядов с атомной решёткой материала в результате возмущения траектории движения электронов под действием магнитного поля. Данный эффект был предсказан Гауссом и экспериментально исследован Томсоном (лордом Кельвином) в 1856 году, является результатом действия силы Лоренца на носители зарядов в проводниках и полупроводниках.
Терморезистивный эффект Зависимость сопротивления проводника от температуры
Рисунок 5.9.Схема дифференциального трансформаторного преобразователя
Для приведенной схемы замещения составим уравнения для магнитных и электрических контуров. Решая их, получим выражение для выходного напряжения:
где X 0 = w W 1 2 G – реактивное сопротивление, обусловленное потокосцеплением взаимоиндукции, замыкающимся через магнитопровод ротора; X об = w W 1 2 G об – сопротивление, обусловленное потокосцеплением взаимоиндукции, замыкающимся вне магнитопровода ротора;
Рассмотренный тип ТП применяется для преобразования углового перемещения в электрический сигнал в пределах 7¸100 и обладает достаточно линейной характеристикой. Вследствие значительной краевой проводимости, изменяющейся нелинейно от положения ротора, этой конструкции присуще наличие реактивного момента. Для его уменьшения и увеличения чувствительности применяют круглый статор электромашинного типа, имеющий в обоих плечах разное количество пазов. Конструктивная схема ТП, по существу включает несколько трехстержневых ТП. По отношению к трехстержневому ТП такая конструкция имеет значительные преимущества, т.к. обладает меньшей чувствительностью к эксцентриситету ротора, удобством установки в приборы и значительно меньшими реактивными моментами вследствие существенного снижения краевых эффектов. Для ТП не удается получить нулевое значение выходного сигнала при среднем положении ротора. В лучших конструкциях ТП “нулевой” сигнал составляет десятки милливольт. В трансформаторном преобразователе с подвижным сердечником необходимо обеспечить такой режим питания, чтобы МДС первичной обмотки, а, следовательно, и ток первичной цепи не изменялись при перемещении сердечника. Для этого в ординарных преобразователях необходимо включить в первичную цепь высокоомный добавочный резистор, а в дифференциальных преобразователях – последовательно соединить первичные обмотки, сопротивления которых изменяются с обратным знаком. Увеличение частоты питающего напряжения позволяет уменьшить как габариты преобразователей, так и реактивный момент (усилия). Наиболее широко применяются дифференциальные трансформаторные преобразователи линейных перемещений (LVDT-датчики). Диапазон измерений таких преобразователей - от сотых долей миллиметра до десятков сантиметров.
Рисунок 5.10
Рисунок 5.11
Конструктивно преобразователь состоит из трех соосных обмоток и подвижного ферромагнитного сердечника. Сердечник короче, чем трансформатор, поэтому при его осевом перемещении изменяется коэффициент магнитной связи обмоток. На центральную обмотку подается напряжение возбуждения, с боковых обмоток снимается наведенный сигнал, пропорциональный положению сердечника. На рисунке 5.11 приведена схема включения датчика в измерительную цепь. Частота изменения входного напряжения обычно составляет единицы килогерц. К достоинствам преобразователей с подвижным сердечником относятся: · высокая надежность, вследствие отсутствия подвижных обмоток и контактов, · высокая чувствительность, · высокая точность, · направленность действия, · высокая перегрузочная способность. Недостатками преобразователей являются ограничение повторяемости характеристик от образца к образцу, вследствие трудности одинакового выполнения распределенных обмоток в ряде преобразователей, высокая стоимость. Для повышения точности, а также для уменьшения реактивных моментов и механических взаимодействий между якорем и сердечником применяют круглый статор, имеющий кратное число полюсов (чаще кратное трём). Такой преобразователь не чувствителен к эксцентриситету, отсутствует реактивный момент.
Пример реализации магнитострикционного эффекта в датчиках линейных перемещений
Рисунок 5.22
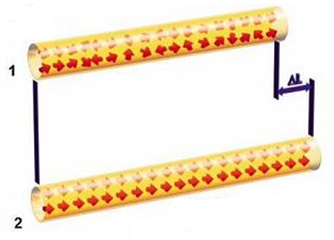
Датчики линейных перемещений (или как их еще называют: датчики линейного положения, датчики и измерители пути) основаны на эффекте магнитострикции. Магнитострикция была обнаружена только в ферромагнитных материалах, таких как железо, никель, кобальт и сплавах. Основой принципа магнитострикции являются магнитомеханические свойства этих материалов. То есть, если ферромагнетик находится в области магнитного поля, то оно вызывает микроскопическую деформацию его молекулярной структуры, что приводит к изменению физических размеров ферромагнетика. Такое поведение объясняется существованием бесчисленного количества маленьких элементарных магнитов, из которых состоит ферромагнитный материал. Они будут стремиться установиться параллельно друг другу в пределах ограниченных пространственных областей, уже без внешнего магнитного поля. В этих, так называемых доменах, все элементарные магниты направлены одинаково. Но первоначальное распределение доменов хаотично и снаружи ферромагнитное тело кажется немагнитным. При приложении магнитного поля, домены выстраиваются по направлению этого поля и выравниваются параллельно друг другу. Таким образом, получаются собственные магнитные поля, которые могут превосходить внешнее магнитное поле в сотни раз. Если, например, стержень из ферромагнитного сплава поместить в магнитное поле параллельное его оси, то стержень испытает механическую деформацию и получит линейное удлинение. Но в реальности удлинение посредством магнитострикционного эффекта очень мало (рис. 5.22) Магнитострикционный эффект обуславливается совокупностью магнитных и механических свойств ферромагнитных материалов, соответственно его можно оптимизировать посредством создания специальных сплавов и управлять с помощью направленного действия внешнего магнитного поля. В промышленных измерительных устройствах используется магнитострикционный эффект (эффект Видемана). Он описывает механическую деформацию (скручивание) длинного, тонкого ферромагнитного стержня, который находится под воздействием двух магнитных полей: внешнего и внутреннего, создаваемого проводником, по которому протекает электрический ток. В датчиках линейных перемещений внешнее магнитное поле создается позиционным магнитом, которое при пересечении с концентрическим магнитным полем, создаваемым электрическим током, вызывает механическую деформацию в небольшой области измерительного элемента в форме стержня (рис. 5.23).
Рисунок 5.23
Так же, в датчиках линейных перемещений используется магнитоупругий эффект (эффект Виллари). Он связан с изменением магнитных свойств ферромагнетика, например, намагниченности ферромагнитного бруска, вызываемое его продольной деформацией. Чтобы превратить изложенные выше физические основы в надежно работающую измерительную систему, была предложена конструкция датчика, представленная на рисунке 5.24.
Рисунок 5.24
Датчик линейных перемещений состоит из 5 основных частей: · измерительный элемент (волновод); · электроника датчика; · позиционер в виде постоянного магнита; · преобразователь торсионного импульса; · демпфирующая часть (на конце стержня, в которой гасится вторая часть торсионного импульса). «Стержнем» измерительной системы является ферромагнитный измерительный элемент, использующийся как волновод, по которому распространяется торсионная ультразвуковая волна до преобразователя импульсов. Измеряемая позиция определяется положением постоянного магнита, который окружает волновод. Этот магнит создает магнитное поле в волноводе и связан с объектом измерения. Здесь нужно подчеркнуть, что между позиционером (магнитом) и измерительным элементом (волноводом), полностью отсутствует механическая связь, что гарантирует долгий срок службы датчиков. При измерении короткий импульс тока посылается из электронной части сенсора по волноводу, что вызывает появление радиального магнитного поля вокруг волновода (рис. 5.24). При пересечении с магнитным полем постоянного магнита-позиционера, возникает, согласно эффекту Видемана, деформация магнитострикционного волновода. Из-за этого возникает ультразвуковая торсионная волна, которая распространяется от места возникновения в оба конца волновода, однако в одном из концов она полностью гасится и, таким образом, помехи и искажения сигнала исключаются. Детектирование и обработка торсионного импульса происходит на другом конце волновода в специальном преобразователе. Преобразователь торсионных импульсов состоит из расположенной поперек волновода и жестко связанной с ним полосы из магнитострикционного металла; детектирующей катушки индуктивности и одного неподвижного постоянного магнита. В преобразователе торсионного импульса, сверхзвуковая волна вызывает изменение намагниченности металлической полосы согласно эффекту Виллари. Следующее из этого временное изменение поля постоянного магнита индуцирует электрический ток катушке индуктивности. Этот возникающий электрический сигнал окончательно обрабатывается электроникой датчика. Торсионная ультразвуковая волна перемещается по волноводу с постоянной скоростью звука. Точное определение позиции получается измерением времени между стартом токового импульса и времени возникновения ответного электрического сигнала, которое определяется в преобразователе торсионных импульсов при детектировании ультразвуковой волны. При кажущейся внешней сложности принципа измерения, на котором созданы датчики линейных перемещений, очевидны несколько преимуществ, которыми они обладают: · измерять расстояние можно с наивысшей точностью; · металлические магнитострикционные материалы обладают долговременными и очень стабильными параметрами; · вся измерительная система надежно защищена от внешних воздействий, например, от вибрации станков. Из суммы этих преимуществ получаем высокоточные датчики перемещения, обладающие высокой повторяемостью измерений и очень большой надежностью.
Рисунок 5. 25 Варианты конструкций преобразователя торсионных импульсов: 1 – волновод с обмоткой, 2 - волновод с пьезоэлектрическим преобразователем, 3 – волновод с перпендикулярно расположенной обмоткой.
Воплощение магнитострикционного принципа в измерительную систему, удовлетворяющую тяжелым требованиям промышленного производства, ставит высокие требования к возможностям и компетенции производителя датчиков. Были детально исследованы различные варианты схемы преобразователя торсионных импульсов, которые представлены на рисунке 4. При этом оказалось, что оптимальная конструкция преобразователя должна быть такой, как на варианте 3. Именно так получается наиболее уверенный и точный сигнал, так как регистрируется только торсионная часть механической волны, а продольные колебания не оказывают влияния на результат измерения. Применение торсионных волн и регистрирующей системы, которая реагирует только на торсионную (скручивающую) волну, позволяет не бояться влияния вибрации на процесс измерения, так как торсионный импульс нельзя вызвать внешней механической вибрацией. Для того, чтобы все физические процессы принципа измерения могли протекать без влияния со стороны внешних воздействий, используются специальные конструкции корпуса, электронная схема обработки сигнала.
Строение материалов Поляризация вещества характеризует объемную плотность дипольных моментов в материале:
где: q – величина электрического заряда; l – расстояние между зарядами; V – объём диэлектрика. В полярных диэлектриках центры распределения положительных и отрицательных зарядов при отсутствии внешнего электрического поля не совпадают, так как молекулы имеют дипольные моменты. В неполярных диэлектриках центры зарядов совпадают, но в электрическом поле происходит их разделение. В результате этого появляются дипольные моменты. В полярных диэлектриках диполи располагаются хаотически, поэтому может быть
В результате поляризации диэлектрика на его поверхности появляется электрический заряд. Плотность заряда на поверхности диэлектрика (
Таким образом, относительная диэлектрическая проницаемость ( В реальных веществах существуют оба механизма поляризации, выраженные в большей или меньшей степени и обусловленные как смещением свободных носителей заряда в объеме диэлектрика, так и упругой деформацией, поворотом диполей в электрическом поле. Литература 1. Электрические измерения неэлектрических величин / Под ред. П.В. Новицкого. – Л.: Ленинградское отд. Энергия, 1975. 2. Карлов Н.В., Кириченко Н.А. Колебания, волны, структуры. – М.: ФИЗМАТЛИТ, 2001. 3. Дубнищев Ю.Н. Колебания и волны: Учеб. пособие – 2-е изд. испр. и доп. – Новосибирск: Сиб. Унив. Изд-во, 2004. 4. Джексон Р.Г. Новейшие датчики. Москва: Техносфера, 2007. – 384 с. 5. Дж. Фрайден. Современные датчики. Справочник. Москва: Техносфера, 2005. – 592 с. 6. Колоколов А.А., Переверзев В.Г. Физические основы получения информации. Ч.2. Физические основы измерительных преобразователей (конспект лекций) МИЦ ГОУ ВПО МГТУ «Станкин», 2006. – 91с. 7. Николаева Е.В. Физические основы получения информации. Измерительные преобразователи. Принципы измерения физических величин. Учебное пособие / Е. В. Николаева, В. В. Макаров. – Омск: Изд-во ОмГТУ, 2007. – 96 с. 8. Физические основы получения информации: Учебное пособие для студентов учреждений высш. проф. Образования / В. Ю. Шишмарев.-М.: Издательский центр «Академия», 2010.-448 с. 9. Патрушев Е.М., Седалищев В.Н. Методические указания к лабораторным работам по курсу «Физические основы получения информации», часть 1-я. – Барнаул: Изд-во АлтГТУ, 2010. - 55с. 10. Седалищев В.Н. Методические указания к курсовому проектированию по дисциплине «Физические основы получения информации». – Барнаул: Изд-во АлтГТУ, 2010. - 41с.
ОГЛАВЛЕНИЕ Введение…………………...………………………….……………………3 Глава 1. Информационно-энергетические основы теории измерений 1.1 Понятие информации. Разновидности информации……………………4 1.2 Количественная оценка информации………………………………….....5 1.3 Связь понятий энергии и информации………...…………………………8 1.4 Применение энергоинформационного подхода к анализу физических процессов………..….………………………………………14 1.5 Связь теории информации с теорией измерений…………………….....22 1.6 Причины наличия ограничений количества информации, получаемой при измерениях………..……………………26 1.7 Естественные пределы измерений……………….……..……………….28 1.8 Разновидности шумов и причины их появления…………..……………30 1.9 Пути повышения информативности процессов измерительного преобразования……...…………………………………37 1.10 Общая характеристика этапов измерительного преобразования………40 Контрольные вопросы к главе 1 Глава 2. Физические основы измерительных преобразователей генераторного типа 2.1 Классификация физических эффектов………….………………………45 2.2 Физические основы электромеханических измерительных преобразователей генераторного типа……….…………………………51 2.3 Пьезоэлектричество………………………………………………………53 2.3.1 Методики расчета поверхностных зарядов, деформаций и механических напряжений при пьезоэффекте………………………56 2.3.2 Принцип работы пьезорезонансного измерительного преобразователя…………………………………………………………58 2.3.3 Применение пьезоэффекта в измерительной технике…………………61 2.3.4 Погрешности пьезоэлектрических преобразователей…….……………66 2.3.5 Конструкции пьезоэлектрических преобразователей……….…………66 2.4 Электрострикция………………...………………………………………..68 2.5 Электреты…………………………………………………………………71 2.6 Физические основы термоэлектрических измерительных преобразователей………………………………………………………….75 2.6.1 Пироэлектричество…………………………………………………….....75 2.6.2 Применение пироэффекта…..……………………………………………78 2.6.3 Термоэлектричество в проводниках и полупроводниках………………82 2.6.4 Применение термоэлектрических эффектов в измерительной технике………………………………………………….87 2.6.5 Разновидности термоэлектрических преобразователей и особенности их эксплуатации…………..……………………………..91 2.6.6 Погрешности термоэлектрических преобразователей…………………98 2.7 Гальваномагнитные эффекты ………...………………………………..100 2.7.1 Эффект Холла……………………..……………………………………..101 2.7.2 Параметры и характеристики датчиков Холла……..…………………103 2.7.3 Изготовление и применение датчиков Холла…………………………106 2.7.4 Метрологические характеристики датчиков Холла…..………………111 Контрольные вопросы к главе 2 Глава 3. Физические основы резистивных измерительных преобразователей 3.1 Принципы построения и разновидности резистивных преобразователей………………………………………………………115 3.1.1 Контактные преобразователи…….…………………………………….115 3.1.2 Резистивные преобразователи контактного сопротивления................118 3.2 Реостатные преобразователи…………...………………………………120 3.2.1 Применение реостатных преобразователей……...……………………123 3.3 Тензорезистивный эффект……………………...………………………126 3.3.1 Тензорезистивный эффект в проводниках…………………………….127 3.3.2 Тензорезистивный эффект в полупроводниках…….…………………128 3.3.3 Применение тензорезисторов…………………..………………………132 3.4 Магниторезистивный эффект…………………………………………..135 3.4.1 Магниторезистивный эффект в проводниках…………………………135 3.4.2 Магниторезистивные эффекты в полупроводниках……..……………137 3.4.3 Разновидности конструктивного исполнения магниторезисторов..…139 3.5 Терморезистивный эффект…………………………..…………………144 3.5.1 Терморезистивный эффект в проводниках…………………………....144 3.5.2 Физические основы полупроводниковых терморезистивных измерительных преобразователей…………...…………………………146 3.5.3 Области применения термосопротивлений…………………………....150 3.5.4 Разновидности термосопротивлений, применяемые материалы и основы расчета…………………………………………....151 3.5.5 Промышленные термометры сопротивления………………………....158 3.5.6 Измерительные цепи термометров сопротивления…...………………160 3.6 Физические основы фоторезистивных измерительных преобразователей……………………….………………………………..164 Контрольные вопросы к главе 3 Глава 4. Физические основы электрохимических измерительных преобразователей 4.1 Основные характеристики электрохимической ячейки……..……….168 4.2 Полярографический эффект в растворах……………………………....171 4.3 Кондуктометрические измерительные преобразователи….………….172 4.4 Электрокинетические явления в растворах…………….……………...175 4.5 Принцип работы гальванических измерительных преобразователей..176 Контрольные вопросы к главе 4 Глава 5. Физические основы электромагнитных измерительных преобразователей 5.1 Принцип работы магнитоиндукционных измерительных преобразователей генераторного типа…………………………………180 5.1.1 Индукционные преобразователи частоты вращения………………….180 5.1.2 Индукционные преобразователи параметров вибрации….…………..182 5.1.3 Магнитоиндукционный расходомер…………………….……………..183 5.2 Индуктивные преобразователи перемещения…………………………184 5.3 Погрешности индукционных преобразователей……...………………187 5.4 Трансформаторные преобразователи перемещения…………..………189 5.5 Дифференциальные трансформаторные прреобразователи перемещений……………………………………………………………192 5.6 Трансформаторный преобразователь перемещения c подвижной обмоткой……...…………………………………………..196 5.7 Принцип работы вихретоковых измерительных устройств……….....198 5.8 Физические основы магнитомодуляционных измерительных преобразователей……...………………………………200 5.8.1 Эффекты модуляции магнитных свойств материалов……..…………209 5.8.2 Пример реализации магнитострикционного эффекта в датчиках линейных перемещений……………………………………210 5.8.3 Дополнительные эффекты, возникающие в магнитомодуляционных преобразователях……………………………215 5.8.4 Эффект Виганда и устройства контроля на его основе…………….....219 5.9 Физические основы создания магнитоупругих измерительных преобразователей……………………………………..222 5.10 Зависимость магнитной проницаемости ферромагнетиков от влияющих факторов……………………………………………………225 5.11 Физические основы методов магнитного неразрушающего контроля…………………………………………….228 5.11.1 Индукционные преобразователи для магнитопорошковой дефектоскопии…………………………………………………………230 5.11.2 Магнитные индукционные головки…………………………………....232 5.11.3 Феррозондовые преобразователи…………...………………………….233 5.11.4 Гальваномагнитные преобразователи………………………………… 236 5.11.5 Магнитные ленты и магнитные порошки………...……………………237 5.11.6 Магнитодоменные преобразователи……………..…………………….238 5.11.7 Матричный магнитный преобразователь………...……………………241 5.11.8 Способы намагничивания и размагничивания объекта контроля……243 5.11.9 Способы размагничивания деталей………………………………….....245 Контрольные вопросы к главе 5 Глава 6. Физические основы емкостных измерительных преобразователей 6.1 Модуляция геометрических размеров емкостных преобразователей…..……………………………………………………249 6.2 Принципы работы емкостных измерительных преобразователей….. 251 6.3 Физические основы емкостных измерительных устройств, основанных на модуляции диэлектрических свойств веществ………254 6.3.1 Строение материалов………………...………………………………… 254 6.3.2 Виды связей и механизмы поляризации диэлектриков………………255 6.3.3 Влияние агрегатного состояния вещества на его диэлектрические свойства…….………………………………………..258 6.3.4 Устройство и принцип действия электростатических преобразователей……..…………………………………………………260 6.3.5 Эквивалентная схема электростатического преобразователя…..……262 6.3.6 Конструкции емкостных измерительных преобразователей…………264 6.3.7 Схема включения в измерительную цепь…………………………..…267 6.3.8 Метрологические характеристики емкостных преобразователей….. 273 6.3.9 Область применения емкостных измерительных преобразователей….……………………………………………………274 Контрольные вопросы к главе 6 Литература………………………………………………………………279 В. Н. Седалищев
ФИЗИЧЕСКИЕ ОСНОВЫ ПОЛУЧЕНИЯ ИНФОРМАЦИИ |
Последнее изменение этой страницы: 2019-03-22; Просмотров: 786; Нарушение авторского права страницы
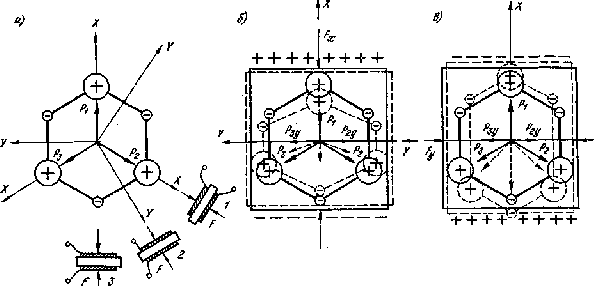
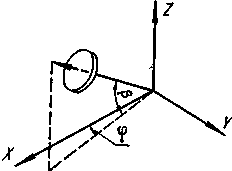
 (2.17)
(2.17) , (2.18)
, (2.18) - относительная объемная деформация; А - постоянная электрострикции.
- относительная объемная деформация; А - постоянная электрострикции. , (2.19)
, (2.19)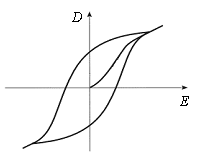

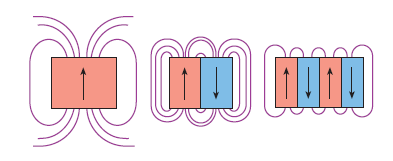



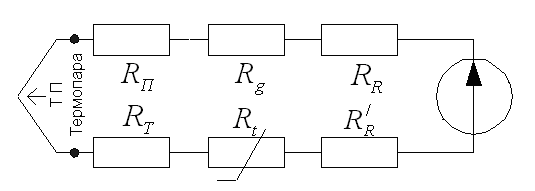


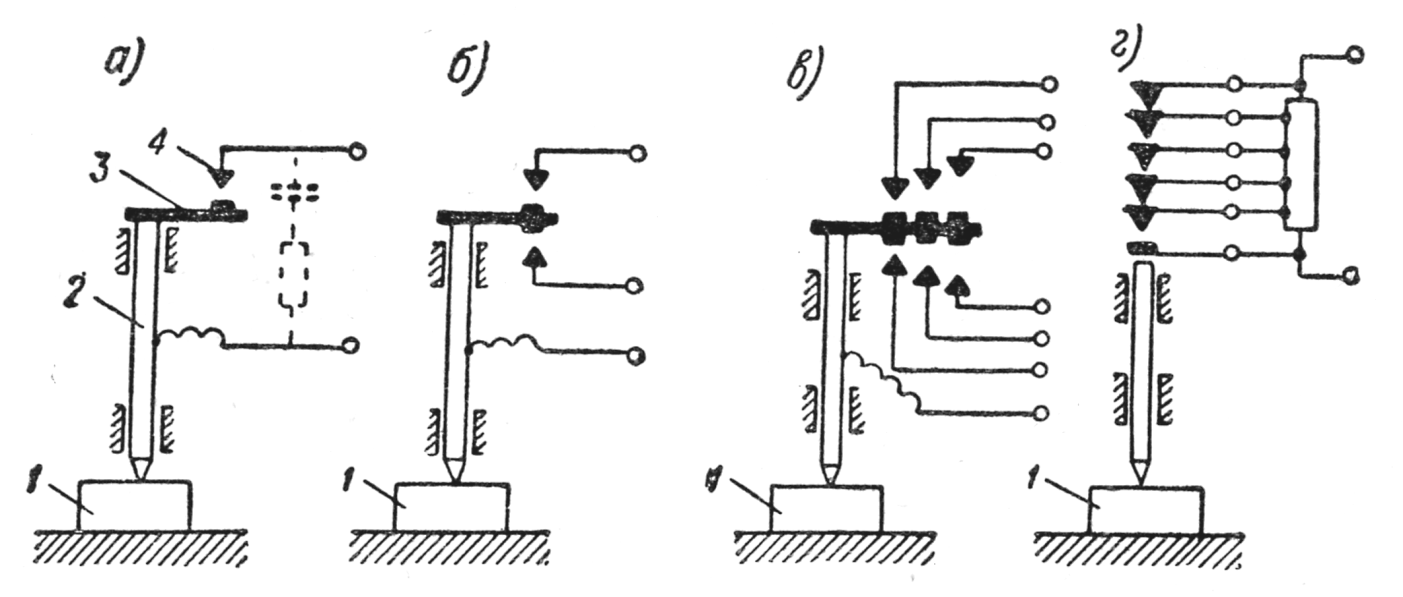
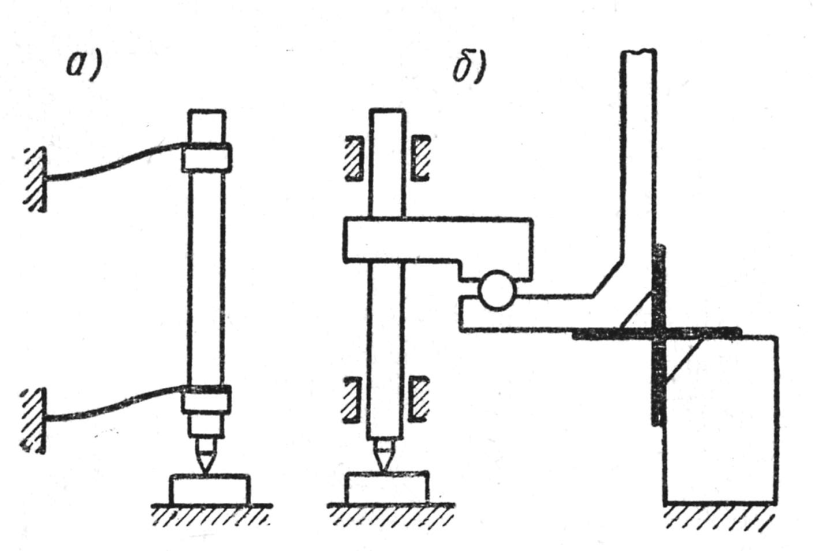
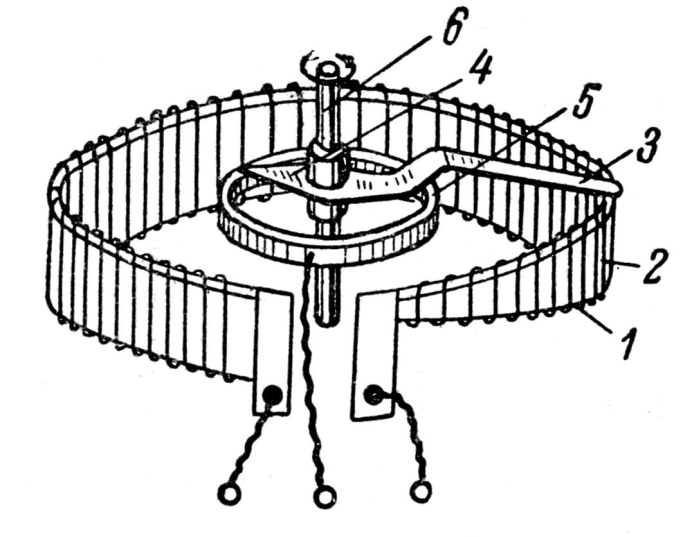
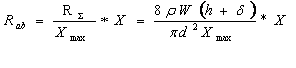 (3.2)
(3.2) (3.3)
(3.3) (3.4)
(3.4)