|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Реостатные преобразователи
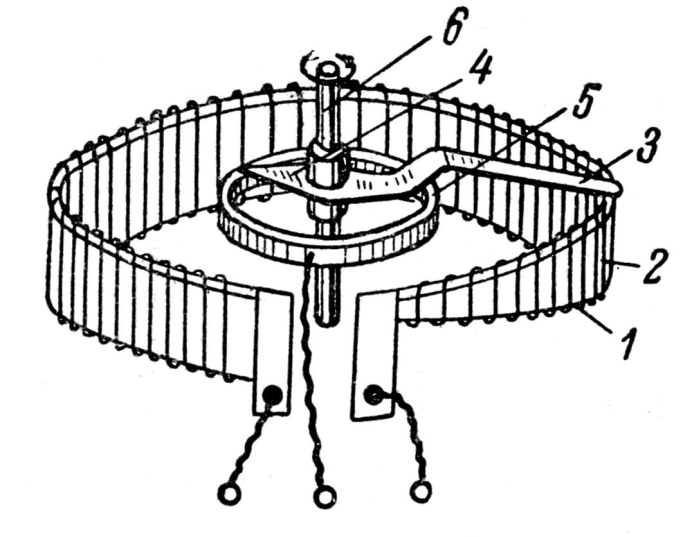
Реостатным преобразователем называют реостат, движок которого перемещается под действием измеряемой неэлектрической величины. Естественной входной величиной реостатных преобразователей является перемещение движка, а выходной – сопротивление. На рис. 3.4 показано устройство реостатного преобразователя. На каркас 1 из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса зачищается, и по металлу проволоки скользит щетка 3. Добавочная щетка 5 скользит по токосъемному кольцу 4. Обе щетки изолированы от приводного валика 6.
Рисунок 3.4 Устройство реостатного преобразователя
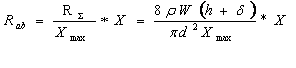
Реостатные преобразователи выполняются как с проводом, намотанным на каркас, так и реохордного типа. Чаще всего используется провод из различных сплавов платины, обладающих повышенной коррозионной стойкостью и износостойкостью; применяется также манганин, константан, фехраль. Микропровод позволяет выполнять миниатюрные преобразователи, имеющие габариты до 5х5 мм. Каркас выполняется из керамических материалов, пластмассы, гетинакса, металлов (алюминий, дюраль), покрытых слоем лака или оксидной изоляцией. Каркас должен обладать большой теплоотдачей. Обмотку выполняют из эмалированного или оксидированного провода с последующим покрытием лаком. Следует выбирать материалы проволоки и каркаса так, чтобы их температурные коэффициенты расширения отличались бы незначительно. В противном случае изменение температуры преобразователя может привести к распусканию обмотки или к появлению недопустимых напряжений. Токосъемные щетки выполняют в виде проволок или лент из бронзы, платиноиридиевого сплава и других упругих материалов или в виде ролика. Последний ставят с некоторым перекосом для обеспечения небольшого скользящего трения и зачистки контактной дорожки. В жидкостных реостатах подвижным элементом является ртуть. Вид статических характеристик реостатных преобразователей определяются следующими зависимостями:
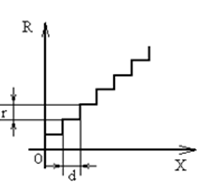
где: RS - полное сопротивление реостата, Rab – сопротивление реостата, соответствующее перемещению движка на расстояние ab, W – число витков обмотки (обычно W составляет 100-200, а в прецизионных преобразователях – десятки тысяч), d – диаметр провода обмотки, r - удельное сопротивление провода, h и s - высота и ширина каркаса, Xmax – максимально возможное перемещение подвижной части, Uсети - напряжение сети. Согласно формулам (3.2 - 3.4) чувствительность преобразователей можно увеличить за счет увеличения W, увеличения h и d, уменьшения d, использования проводов обмоток с большим удельным сопротивлением r. Реостатные преобразователи аналогично контактным являются ступенчатыми (дискретными) преобразователями (за исключением преобразователей реохордного типа), поскольку непрерывному изменению входной величины соответствует ступенчатое изменение сопротивления. Реальная статическая характеристика реостатных преобразователей имеет ступенчатый характер (рис.3.5). И поэтому при увеличении габаритов h и d происходит увеличение погрешности из-за ухудшения разрешающей способности, т.е. минимального значения входной величины, изменение которой вызывает изменение входной величины. Это обстоятельство вызывает погрешность квантования, уменьшающуюся при увеличении числа витков W преобразователя (при уменьшении диаметра обмотки d). При уменьшении диаметра провода обмотки d одновременно улучшается разрешающая способность преобразователя. Отсюда следует, что основные пути увеличения чувствительности: уменьшение d и увеличение r. Рисунок 3.5 Вид ступенчатых характеристик реостатных преобразователей. Источники основной погрешности: - загрязнение контактной пары щетка-провод и ее окисление; - стирание контактной поверхности; - гистерезис щетки преобразователя вследствие нежесткого ее крепления; - температура внутреннего нагрева.
Источники дополнительной погрешности: погрешность квантования · влияние внешних магнитных полей на преобразователи с выходным током и напряжением, заключающееся в наведении дополнительной ЭДС в обмотке; · колебание частоты питающей сети; · колебание напряжения Uсети; · влажность воздуха; · изменение величины контактного сопротивления при изменении скорости перемещения подвижной части, которое может достигать значительных величин; · вибрация, которую уменьшают путем выполнения волосков щетки разной длины (это приводит к различным собственным частотам колебаний). · влияние внешней температуры на размеры h, d, d и удельное сопротивление r. Суммарная погрешность, вызванная непостоянством параметров преобразователей составляет 0,05-0,1%. Температурная погрешность обычно не превышает 0,1% на 10 градусов.
|
Последнее изменение этой страницы: 2019-03-22; Просмотров: 445; Нарушение авторского права страницы
 (3.2)
(3.2) (3.3)
(3.3)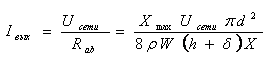 (3.4)
(3.4)