
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Внешние и регулировочные характеристики синхронного генератора.
Внешняя характеристика.
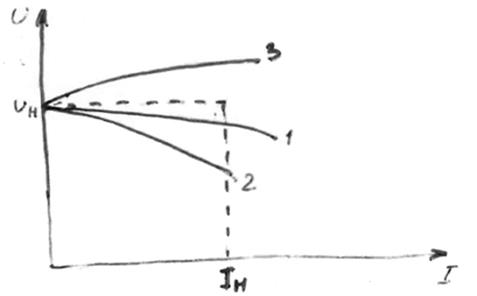
Внешняя характеристика синхронного генератора характеризует его электрические свойства и представляет собой зависимость напряжения на зажимах генератора U от его тока нагрузки I при постоянных значениях коэффициента мощности cosφ, скорости вращения ротора n и тока возбуждения Iв. Чтобы экспериментально получить внешнюю характеристику, нужно сначала нагрузить генератор до номинального тока Iн при номинальном напряжении Uн на зажимах генератора, которое устанавливается путём регулировки тока возбуждения. Затем, поддерживая ток возбуждения и частоту вращения постоянными, постепенно уменьшают ток нагрузки до нуля. Внешние характеристики могут иметь спад (кривая 2) или подъём (кривая 3) в зависимости от характеристики нагрузки и действия реакции якоря. Номинальный режим нагрузки выбирают так, чтобы при cosφ = 0, 8 изменение напряжения Δ U не превышало 35 – 45% от номинального (кривая 1).
Регулировочная характеристика.
Представляет собой зависимость тока возбуждения генератора Iв от тока нагрузки I при U= Uн=const, n=nн=const, cosφ = const. Эта характеристика показывает, как выбирать ток возбуждения, при котором напряжение на зажимах генератора оставалось бы постоянным при изменении нагрузки. Для получения регулировочной характеристики нужно сначала включить генератор и сообщить его ротору номинальную скорость вращения при холостом ходе, а потом путём изменения тока возбуждения добиться получения номинального напряжения Uн. Далее постепенно увеличивают ток нагрузки и снимают характеристику, добиваясь в каждой точке напряжения на зажимах U = Uн = const, регулируя ток возбуждения. Мы видим регулировочные характеристики при различных cosφ. Кривая 2 – активно-индуктивная нагрузка (ток Iв нужно уменьшить). Кривая 3 – активно-ёмкостная нагрузка (ток Iв нужно увеличить). Кривая 1 – оптимальный режим. Регулировочные характеристики имеют важное значение, т.к. они определяют пределы изменения тока возбуждения для поддержания номинального напряжения при изменении нагрузки.
Синхронный двигатель Синхронной называется электрическая машина, скорость вращения n (об/мин) которой связана постоянным отношением с частотой n = 60 * f / p (где р — число пар полюсов машины) сети переменного тока, в которую эта машина включена. Синхронный двигатель – синхронная машина, работающая в режиме двигателя. В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянна при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы).
Рис. 1 Рассмотрим принцип работы синхронного двигателя на модели
Вращающееся магнитное поле статора представим в виде магнита 1. Намагниченный ротор изобразим в виде магнита 2. Повернем магнит 1 на угол α. Северный магнитный полюс магнита 1 притянет южный полюс магнита 2, а южный полюс магнита 1 - северный полюс магнита 2. Магнит 2 повернется на такой же угол α. Будем вращать магнит 1. Магнит 2 будет вращаться вместе с магнитом 1, причем частоты вращения обоих магнитов будут одинаковыми, синхронными,
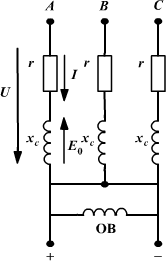
Синхронный реактивный двигатель - это синхронный двигатель, на роторе которого отсутствует обмотка возбуждения. Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма. У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов. В настоящее время применяется асинхронный пуск синхронного двигателя. В пазах полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Вращающее магнитное поле статора индуктирует в короткозамкнутой пусковой обмотке вихревые токи. При взаимодействии этих токов с магнитным полем статора образуется асинхронный электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приближается к частоте вращения статорного поля, двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю. На рис. 6.16 показана простейшая схема трехфазного синхронного двигателя. К обмотке статора подведено трехфазное переменное напряжение, к обмотке возбуждения — постоянное напряжение.
по второму правилу Кирхгофа составим уравнение откуда определим ток якоря На рис. 6.17 показана векторная диаграмма двигателя при определенных значениях механической нагрузки и тока возбуждения.
Синхронному двигателю соответствуют такие же уравнения для мощностей, как и для синхронного генератора, но смысл их будет иным. В двигательном режиме работы синхронной машины
Электромагнитный момент двигателя выражается через мощность и угловую частоту вращения:
Уравнение угловой характеристики синхронного двигателя:
Угловая характеристика показана на рис. 6.18. При постоянных значениях
Рабочая часть характеристики при условно положительном направлении вращения двигателя расположена в первом квадранте. Часть характеристики, расположенная в пределах При номинальном моменте двигателя
Преимущества, недостатки и применение синхронных двигателей. Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc. Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью. Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя. Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п. Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
|
Последнее изменение этой страницы: 2019-04-09; Просмотров: 1419; Нарушение авторского права страницы



 (6.30)
(6.30) (6.31)
(6.31) Рис. 6.17
Рис. 6.17 представляет собой потребляемую из сети мощность. Вычитанием из этой мощности потерь мощности в обмотке якоря получается электромагнитная мощность, преобразуемая в механическую:
представляет собой потребляемую из сети мощность. Вычитанием из этой мощности потерь мощности в обмотке якоря получается электромагнитная мощность, преобразуемая в механическую:  (6.32)
(6.32)
 (6.33)
(6.33) (6.34)
(6.34) электромагнитный момент синхронного двигателя пропорционален
электромагнитный момент синхронного двигателя пропорционален 

 , называется устойчивой. Для устойчивой части характеристики характерно выполнение общего принципа саморегулирования электрических машин: увеличение момента нагрузки приводит к увеличению момента двигателя до такого же уровня. Часть характеристики, расположенная в пределах 90…180, называется неустойчивой, так как увеличение момента нагрузки в этой области приводит к остановке двигателя.
, называется устойчивой. Для устойчивой части характеристики характерно выполнение общего принципа саморегулирования электрических машин: увеличение момента нагрузки приводит к увеличению момента двигателя до такого же уровня. Часть характеристики, расположенная в пределах 90…180, называется неустойчивой, так как увеличение момента нагрузки в этой области приводит к остановке двигателя. угол
угол  находится в пределах
находится в пределах  , а отношение
, а отношение  . Это отношение характеризует перегрузочную способность двигателя. Перегрузочная способность может быть увеличена за счет повышения ЭДС
. Это отношение характеризует перегрузочную способность двигателя. Перегрузочная способность может быть увеличена за счет повышения ЭДС 
 ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.