
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамические характеристики САР
- это параметры САР, которые снимаются между двумя установившимися состояниями. График, описывающий динамические характеристики называется переходным процессом. Кривая разгона Импульсная кривая Переходный процесс выполняется в трехмерных координатах (двойные) показывающие зависимость х и у от времени. Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся, или статическим режимом. Любое звено и САУ в целом в данном режиме описывается уравнениями статики вида у = F(u, f), в которых отсутствует время t. Соответствующие им графики называютсястатическими характеристиками. Статическая характеристика звена с одним входом и может быть представлена кривой у =F(u) (рис. 1.10). Если звено имеет второй вход по возмущениюf, то статическая характеристика задается семейством кривых у = F(u) при различных значениях f, или у = F(f) при различныхи. 25 Понятие передаточной функции и частотные характеристики линейных САР. Для оценки свойств элемента или системы Лаплас ввел понятие передаточной функции. Передаточной функцией называется отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях.
Понятием передаточной функции удобно пользоваться при математическом описании и расчёте процессов изменяющихся во времени. При анализе процессов удобно пользоваться понятием частотной передаточной функции. Частотная передаточная функция формально получается из (5) путём подстановки вместо р
Здесь предполагается, что на вход подаётся гармонический сигнал
Частотные методы исследования САР (САУ) основаны на рассмотрении установившейся реакции системы на гармоническое входное воздействие. Выбор таких воздействий обусловлен следующими причинами: - реально встречающиеся воздействия, как правило, могут быть представлены в виде суммы гармоник различных частот на основе разложения Фурье; - в установившихся режимах гармонические сигналы передаются линейными системами без искажения; - обычно не возникает затруднений в экспериментальном исследовании поведения таких систем при гармонических воздействиях. Пусть на вход линейного объекта (звена) поступает гармоническое воздействие
представленное на рис. 3.5,
Рис. 3.5. Входное и выходное гармонические воздействия
где А – амплитуда гармонического воздействия; j - фаза сигнала; w - круговая частота; Т – период сигнала, причем В установившемся режиме, если система устойчива, по истечении достаточно большого промежутка времени в ней установится периодическое движение с той же частотой, но с другими амплитудой В и фазой y, т.е. сигнал
также представленный на рис.3.5. Изменения амплитуды и фазы выходного сигнала обусловлены как свойствами рассматриваемого объекта (видом дифференциального уравнения и значениями параметров), так и частотой. Частотные характеристики системы (элементов) описывают передаточные свойства системы и ее звеньев в режиме установившихся гармонических колебаний, вызванных внешним гармоническим воздействием. Отношение амплитуд В/А и разность фаз Dj=y-j являются функциями частоты, графики которых называются амплитудно-частотными
и фазовыми частотными
характеристиками. Они показывают, что в линейной системе амплитуда и фаза гармонического сигнала в установившемся режиме изменяются при каждом значении частоты w. Частотной амплитудно-фазовой функцией (частотной передаточной функцией) W(jw) называется функция изменения амплитуды и фазы выходной переменной системы в установившемся режиме при приложении на вход гармонического воздействия. График частотной передаточной функции W(jw) называется амплитудно-фазовой частотной характеристикой (АФЧХ). Частотная передаточная функция W(jw) получается на основе преобразования Фурье, являющимся частным случаем преобразования Лапласа прир=jw:
На практике частотную передаточную функцию W(jw) получают путем замены в передаточной функции
р® jw . В итоге W(jw) имеет вид:
Частотная передаточная функция является комплексно-частотной функцией, которая на комплексной плоскости представляется, так как показано на рис. 3.6. Тогда можно записать, что
Из рис. 3.6 видно, что АФЧХ представляет собой годограф, определяющий геометрическое место точек для вектора с модулем А(w). Амплитудно-частотной характеристикой называется график функции А(w), определяемой выражением:
Рис. 3.6. Амплитудно-фазовая частотная характеристика САР
которая характеризует закон изменения соотношения амплитуд выходного и входного сигналов в зависимости от частоты. Примерный график амплитудно-частотной характеристикой для статической системы приведен на рис. 3.7.
Рис. 3.7. Амплитудная частотная характеристика статической САР Фазовой частотной характеристикой j(w) называется график функции
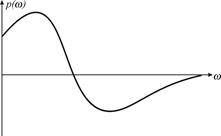
которая характеризует фазу выходного сигнала в зависимости от частоты задающего воздействия, примерный вид которой для статической системы представлен на рис. 3.8. Вещественной частотной характеристикой P(w) называется график функции
Рис. 3.8. Фазовая частотная характеристика статической САР
представленный на рис. 3.9.
Рис. 3.9.Вещественная частотная характеристика статической САР
Особенность функции Р(w) является ее четность, т.е. Мнимой частотной характеристикой Q(w) (МЧХ) называется график функции Q(w), определяемой по выражению:
примерный график которой приведен на рис. 3.10. Функция Q(w) является нечетной функцией, т.е. 26 звенья в файле звенья)
27 Способы соединения звеньев Систему автоматического управления можно рассматривать как комбинацию типовых динамических звеньев. Изображение системы управления в виде совокупности типовых и нетиповых динамических звеньев с указанием связей между ними носит название структурной схемы системы. Звено в этом случае выступает как элементарная структурная единица, преобразователь информации. Структурные схемы состоят из отдельных структурных элементов. Основными элементами структурных схем являются следующие. 1. Звено с одним входом и одним выходом: Y(s)=W(s)X(s).
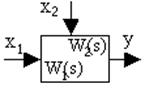
2. Звено с двумя входами и одним выходом (около каждого входа записывается своя передаточная функция):Y(s)=W1(s)X1(s)+W2(s)X2(s)
3. Линия связи и узел (разветвление), стрелка показывает направление передачи информации.
4. Сумматор.
5. Элемент сравнения.
В системах управления встречаются три вида соединений звеньев: последовательное, параллельное и соединение по схеме с обратной связью. Последовательное соединение звеньев изображено на рис.3.10, такое соединение характеризуется тем, что выход предыдущего звена подается на вход последующего.
Рис. 3.10. Последовательное соединение звеньев
Выходная величина последовательно соединенных звеньев определяется Откуда результирующая передаточная функция
Следовательно, в общем случае можно записать
где n - число включенных последовательно звеньев. Таким образом, результирующая передаточная функция последовательно соединенных звеньев равна произведению передаточных функций составляющих звеньев. Параллельное соединение звеньев изображено на рис.3.11, такое соединение характеризуется тем, что на входы всех звеньев подается одно и то же входное воздействие, а выходная величина определяется суммой выходных величин отдельных звеньев.
Рис. 3.11. Параллельное соединение звеньев
Выходная величина параллельно соединенных звеньев определяется y=y1+y2+y3, т.е.
Тогда В общем случае
где n - число включенных параллельно звеньев. Таким образом, результирующая передаточная функция параллельно соединенных звеньев равна сумме передаточных функций составляющих звеньев. Обратная связь. Такое соединение звеньев изображено на рис.3.12, оно характеризуется тем, что выходной сигнал звена подается на его вход.
Рис. 3.12. Соединение звеньев по схеме с обратной связью
Обратная связь может быть положительной (ПОС), если сигнал y1, снимаемый с выхода второго звена, суммируется с сигналом x на входе, и отрицательной (ООС), если y1 вычитается. Кроме того, обратные связи могут быть жесткими и гибкими. Связь называется гибкой, если передаточная функция W2(s) в установившемся режиме равна нулю. Для определения результирующей передаточной функции такой комбинации звеньев запишем очевидные соотношения:
где знак “+” относится к положительной, а знак “-” - к отрицательной обратной связи. Откуда результирующая передаточная функция обратной связи имеет вид
где знак “+” соответствует ООС, знак “-” - ПОС. В общем случае, сложная цепь динамических звеньев, образующих систему управления, включает в себя комбинации всех трех рассмотренных случаев, т.е. представляет собой смешанное соединение звеньев. Пользуясь выражениями (3.51), (3.52) и (3.53), можно найти общую результирующую передаточную функцию смешанного соединения звеньев. В тех случаях, когда структурная схема системы оказывается сложной и содержит перекрестные связи, ее упрощают и сводят к простейшему эквивалентному виду, пользуясь правилами преобразования структурных схем [1,2,7]. Основные правила эквивалентного преобразования структурных схем. 1. Перенос сумматора: а)
y = x1+x2+x3+x4 y = x1+x4+x2+x3
б)
y = x1W1(s)+x2 y = [x1+x2W1-1(s)] W1(s) = x1W1(s)+x2 2. Перенос узла: а)
б)
3. Преобразование к единичной обратной связи.
28 Устойчивость линейных САР САР всегда подвержена различного рода возмущениям, которые отклоняют ее режим от желаемого, и основное назначение САР — уменьшать эти отклонения. Если САР способна возвратиться к желаемому режиму, то она является устойчивой, а следовательно, работоспособной. В противном случае — неустойчивой и неработоспособной Желаемый режим может быть установившимся и неустановившимся. Рассмотрим более подробно устойчивость установившемся режиме (такой режим характерен для систем автоматической стабилизации, для позиционных следящих систем и т. д.). Если рассмотретьотклонение Δу системы от установившегося режима под действием кратковременного возмущения, то в устойчивой системе это отклонение исчезает со временем (рис. 5-1,а), а в неустой
Рис. 5-1. Характер изменения отклонений в устойчивой (а)и неустойчивой (б) САР
чивой — нарастает (рис. 5-1,б). Характер процесса при этом может быть апериодическим (кривая 1) или колебательным (кривая 2).Апериодический нарастающий процесс может возникнуть в САР с регулированием по отклонению, если, например, неправильно выбрать полярность обратной связи, включив вместо отрицательной обратной связи положительную. В этом случае управляющее устройство будет не устранять отклонение, а увеличивать его. Колебательный нарастающий процесс может наступить, например, при чрезмерно большом коэффициенте усиления системы, когда возникшее отклонение настолько энергично возвращает систему к установившемуся режиму, что система из-за инерции или запаздывания проскакивает его, приводя к еще большему отклонению и т. д. Аналогичный характер процессов справедлив и для неустановившихся режимов: система считается устойчивой, если отклонение от желаемого режима остается ограниченным по величине при действии на нее ограниченных возмущений. Основой для анализа систем на устойчивость являются методы, разработанные А. М. Ляпуновым (1892 г.). Для линейных или линеаризованных систем необходимым и достаточным условием устойчивости системы является отрицательный знак действительной части всех корней характеристического уравнения, составленного для уравнений первого приближения. Если же хотя бы один корень имеет положительную действительную часть, то система является неустойчивой. Таким образом, для исследования устойчивости системы надо знать корни ее характеристического уравнения. 29.Критерий устойчивости Найквиста. Критерий Найквиста - частотный критерий, позволяющий по виду амплитудно-фазовой частотной характеристики разомкнутой системы оценить устойчивость работы замкнутой системы. АФЧХ может быть получена экспериментально или аналитически. Аналитическое построение АФЧХ производится обычными методами. Критерий Найквиста формулируется по разному в зависимости от того, устойчива разомкнутая система или нет.
АФЧХ астатической системы, начинаясь на вещественной положительной полуоси, при ω->0 дугой бесконечно большого радиуса перемещается на угол, равный -ν
Если разомкнутая система неустойчива, то для устойчивости замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы охватывала точку с координатами (-1, j0) и при изменении частоты от 0 до
Запас устойчивости по фазе задается некоторым углом φ (рис.4.6). В хорошо демпфированных системах запас устойчивости по амплитуде составляет примерно 6-20 дБ, что составляет 2÷10 в линейном масштабе, а запас по фазе от 30 до 60°.
По ЛЧХ разомкнутой системы можно определить запасы устойчивости: запас по фазе φзап отсчитывается по л.ф.х. на частоте среза ωср и равен φзап=π - φ(ωср), а запас по амплитуде Lзап соответствует значению л.а.х. на частоте, при которой л.ф.х. равна -π (рис.4.7). Если φ(ωср)=-&pi, то система находится на границе устойчивости. Критический коэффициент усиления разомкнутой системы Kкр определяется из выражения 20*lg(Kкр)=20*lg(Kраз) + Lзап.
30.Основные законы регулирования. |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 916; Нарушение авторского права страницы

 . (5)
. (5)
 . (6)
. (6) , где
, где  - амплитуда, а ω – угловая частота внешнего воздействия.
- амплитуда, а ω – угловая частота внешнего воздействия.
 , (3.12)
, (3.12)
 .
. , (3.13)
, (3.13) (3.14)
(3.14) (3.15)
(3.15) . (3.16)
. (3.16) (3.17)
(3.17) . (3.18)
. (3.18) . (3.19)
. (3.19) , (3.20)
, (3.20)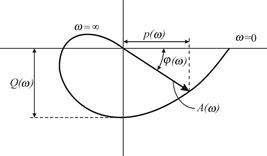

 , (3.21)
, (3.21) , (3.22)
, (3.22)
 .
. , (3.23)
, (3.23)

 и
и 

 или
или 


 .
. равняется
равняется .
. , (3.51)
, (3.51)
 .
. .
. , (3.52)
, (3.52)
 ,
, , (3.53)
, (3.53) Þ
Þ 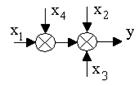
 Þ
Þ 
 Þ
Þ 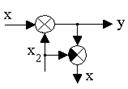
 Þ
Þ 
 Þ
Þ 




 не охватывала точку с координатами -I, j0. Если АФЧХ разомкнутой системы проходит через точку с координатами -I, j0, то система будет нейтральной. На рис.4.4 представлены АФЧХ разомкнутых статических систем. Критерий Найквиста позволяет наглядно проследить влияние изменения параметров передаточной функции на устойчивость системы.
не охватывала точку с координатами -I, j0. Если АФЧХ разомкнутой системы проходит через точку с координатами -I, j0, то система будет нейтральной. На рис.4.4 представлены АФЧХ разомкнутых статических систем. Критерий Найквиста позволяет наглядно проследить влияние изменения параметров передаточной функции на устойчивость системы.
 , где ν - порядок астатизма. На рис.4.5 изображена АФЧХ устойчивой в замкнутом состоянии астатической системы первого порядка.
, где ν - порядок астатизма. На рис.4.5 изображена АФЧХ устойчивой в замкнутом состоянии астатической системы первого порядка.


 .
.