
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение передаточных функций корректирующих устройств
После выбора и определения параметров желаемой передаточной функции разомкнутой системы находят передаточные функции корректирующих устройств, предварительно определив передаточную функцию функционально необходимых устройств проектируемой системы. К таким устройствам относятся, например, фазовый детектор и перестраиваемый генератор в системе ФАПЧ, гетеродин и частотный дискриминатор в системе АПЧ, угловой дискриминатор и антенна с исполнительным устройством и усилителем мощности в системе автоматического сопровождения цели РЛС. Передаточную функцию разомкнутой системы без корректирующих устройств, составленную из передаточных функций функционально необходимых устройств системы, будем называть исходной передаточной функцией. Включение в систему РА корректирующих устройств означает введение в алгоритм управления, формируемого регулятором системы, дополнительных сигналов, пропорциональных сигналу ошибки, производным и интегралам от него, а также сигналов, пропорциональных производным от выходного сигнала. С физической точки зрения введение дополнительных сигналов приводит к компенсации влияния на качество работы системы РА наиболее инерционных устройств системы, в результате чего и достигаются заданные показатели качества работы системы. Различают три способа включения корректирующих устройств: последовательный (рис. 7.2, а); параллельный (рис. 7.2,б) и по схеме с обратной связью (рис. 7.2, в). Выбор того или иного способа включения корректирующего устройства зависит от удобства технической реализации и требований к стабильности характеристик системы РА.
Синтез систем РА основан на определении передаточной функции корректирующего устройства, включенного последовательно в цепь сигнала ошибки системы. Передаточная функция этого устройства должна быть выбрана такой, чтобы выполнялось условие
где Wри(p) – передаточная функция исходной части разомкнутой системы; Wкз(p) – передаточная функция последовательного корректирующего звена. Из выражения (7. 21) найдем
Следовательно, чем больше звеньев исходной передаточной функции включено в желаемую передаточную функцию системы, тем проще передаточная функция корректирующего звена. Число звеньев исходной функции, которые можно ввести в желаемую передаточную функцию, определяется заданным запасом устойчивости по фазе. Если в системе РА применяется корректирующее устройство, включенное в цепь обратной связи, то его передаточная функция имеет вид
откуда
где Wo(p) – передаточная функция корректирующего устройства в цепи обратной связи; Woб(p) – передаточная функция объекта управления (устройств, охваченных обратной связью). Если используют корректирующее устройство, включенное параллельно с каким-либо элементом системы, то его передаточная функция с учетом рис. 7.2 определяется как
Тогда
где Wп(p) – передаточная функция параллельного корректирующего устройства; W1(p) – передаточная функция цепи сигнала ошибки. В современных системах РА применяются все три способа включения корректирующих устройств. Это объясняется тем, что в ряде случаев передаточная функция одного устройства получается настолько сложной, что ее трудно реализовать технически. Кроме того, для улучшения стабильности работы систем РА относительно изменений условий окружающей среды и колебаний напряжений источников питания, целесообразно наиболее инерционные и нестабильные устройства системы охватить обратной связью. При этом передаточная функция последовательного корректирующего устройства, вычисленная по формуле (7.22), имеет вид
Один из сомножителей этого выражения, например, первый, реализуется с помощью последовательного корректирующего устройства, а второй – эквивалентного корректирующего устройства в цепи обратной связи, передаточная функция которого определяется по формуле (7.24). При синтезе систем РА часто оказывается, что передаточные функции корректирующих устройств не удовлетворяют условию физической реализуемости. Очевидно, что в таких случаях желаемая передаточная функция из-за упрощения передаточных функций корректирующих устройств может быть реализована лишь приближенно. При этом необходимо обеспечить совпадение ЛЧХ разомкнутой системы в области низких и средних частот с желаемыми ЛЧХ, расхождение характеристик допустимо только в области высоких частот. После упрощения передаточных функций корректирующих устройств необходимо построить ЛЧХ спроектированной системы РА и проверить выполнение заданных показателей качества работы. Обычно в системах РА применяют корректирующие устройства на постоянном токе. Корректирующие устройства на переменном токе используют редко, так как они сложны и для их нормальной работы требуются источники энергии с высокой стабильностью частоты, что в ряде случаев, особенно в системах РА летательных аппаратов, невыполнимо. Ниже рассматриваются корректирующие устройства постоянного тока. На рис. 7.3, а, б показаны схема и ЛЧХ звена с отставанием по фазе, которое используется в системах РА как последовательное корректирующее устройство. Его передаточная функция имеет вид
где Т=R2С – постоянная времени звена;
Рис. 7.3 - Схема (а) и ЛЧХ (б) корректирующего звена с отставанием по фазе На рис. 7.4, а, б представлены схема и ЛЧХ последовательного корректирующего звена с опережением по фазе, передаточная функция которого
где Т=R1С;
Рис. 7.4 - Схема (а) и ЛЧХ (б) корректирующего звена с опережением по фазе
В системах РА применяют также последовательное комбинированное звено, схема которого и ЛЧХ изображены на рис. 7.5, а, б. Передаточная функция звена имеет вид
Сопротивления и емкости выбираются такими, чтобы выполнялось условие Т1>Т2>Т3>Т4. С этой целью необходимо, чтобы C2>C1 и R1>R2. Тогда сопротивления и емкости звена рассчитывают по известным постоянным времени
В качестве корректирующих обратных связей используют жесткие и гибкие связи.
Рис. 7.5 - Схема (а) и ЛЧХ (б) комбинированного корректирующего звена Жесткая обратная связь не содержит дифференцирующих звеньев. Рассмотрим ее влияние на характеристики отдельных звеньев. Если жесткой обратной связью охватить инерционное звено, то, согласно (4.5),
где k = k1/(1+k1k0); T = T1/(l+k1k0); k1, T1 – коэффициент передачи и постоянная времени инерционного звена, охваченного обратной связью; ko – коэффициент передачи обратной связи. Таким образом, при охвате инерционного звена жесткой обратной связью не изменяется его тип, однако коэффициент усиления и постоянная времени уменьшаются в (l+k1k0) раз. Если жесткой обратной связью с коэффициентом передачи k0 охватить интегрирующее звено с коэффициентом передачи k1, то получим инерционное звено с параметрами k = 1/k0, T = 1/(k1k0) (изменяется тип звена). Следовательно, такую связь необходимо использовать в тех случаях, когда требуется понизить порядок астатизма, т.е. исключить в системе влияние интегрирующего звена. Гибкая обратная связь содержит дифференцирующие звенья, поэтому она действует только в переходном процессе, что не снижает точности системы в установившемся режиме. Оценим влияние гибкой обратной связи на характеристики различных звеньев. Если такой связью с передаточной функцией
охватить безынерционное звено, то получим звено с передаточной функцией
где k1 – коэффициент передачи безынерционного звена. Таким образом, охват безынерционного звена гибкой обратной связью эквивалентен включению в цепь сигнала ошибки системы последовательного звена с отставанием по фазе. Если гибкой обратной связью с передаточной функцией (7.32) охватить интегрирующее звено, то
где Из выражения (7.34) следует, что охват интегрирующего звена гибкой обратной связью эквивалентен последовательному включению в цепь сигнала ошибки системы звена с опережением по фазе, при этом астатизм системы РА не снижается. Для создания такого вида связи используются тахогенераторы, гироскопические датчики частоты вращения, RC-цепи. На рис. 7.6, а показана схема RС-цепи, передаточная функция которой определяется (7.32). Сигнал на выходе такой цепи в определенном диапазоне частот пропорционален первой производной uвых(t).
Рис. 7.6 - Гибкие обратные связи
В системах РА применяются гибкие обратные связи, выходной сигнал которых пропорционален второй производной входного сигнала обратной связи. Такая обратная связь (рис. 7.6, б) может быть сформирована с помощью тахогенератора и дифференцирующей RC-цепи, если входным сигналом обратной связи является угол поворота, или с помощью RС-цепи, изображенной на рис. 7.6, в, если на входе подается сигнал постоянного тока. Передаточная функция такой цепи
где Если R1<<R2, то приближенно можно принять, что
Пример. Синтезировать систему автоматического сопровождения цели РЛС (рис. 7.7). Найти передаточные функции корректирующих устройств из условия обеспечения в системе полосы пропускания, равной 10 с–1. Показатель колебательности не превышает 1,4, ошибка по положению равна нулю, ошибка по скорости – не более 0,175×10–2 рад и ошибка по ускорению – не более 0,87×10–2 рад при максимальных значениях производных сигнала 0,175 рад×с–1 и 0,35 рад×с–2.
Рис. 7.7 - Структурная схема системы автосопровождения цели РЛС Решение. Передаточная функция исходной части системы
где Параметры устройств исходной части системы: kп = 0,035 В/рад; kфд=0,8; kум = 10; k = 143 рад/(с В); Tп = Tфд = Tп=0,01 с; Tм = =0.02 с. Коэффициент передачи исходной части системы
С учетом требований к системе и формул (7.9)–(7.12) D j = 0,785 рад; wср = 7 с–1; С0 = 0; С1 = 0,01 с; С2 = 0,05 с2; К =100 с–1. В качестве желаемой передаточной функции разомкнутой системы примем функцию (7.7). Все частоты сопряжения передаточных функций устройств исходной части системы автоматического сопровождения (7.37) больше требуемой частоты среза, поэтому для упрощения корректирующих устройств включим передаточную функцию исходной части системы в состав желаемой передаточной функции. В результате получим
Постоянные времени T1, T2 и Т3 вычислим по формулам (7.19) и (7.20). Тогда T1 = 1,7 с; T2 = 0,45 с; T3 = 0,015 с. Так как значение T3 незначительно отличается от постоянной времени двигателя Tм=0,02 с, то для упрощения корректирующего устройства примем Т3=Тм. Передаточную функцию последовательного корректирующего устройства найдем, используя выражение (7.22):
где kкз = К/Ки–коэффициент передачи корректирующего звена; Ки – коэффициент передачи исходной части системы. Первый сомножитель в (7.40) реализуем в виде последовательного корректирующего устройства, включенного после фазового детектора, а второй – через эквивалентную обратную связь, передаточную функцию которой рассчитаем по формуле (7.24). Таким образом,
где k0 = (T1–T2)/(kykA) – коэффициент передачи цепи обратной связи. В выражении (7.41) пренебрегли постоянными времени Tу и Тм, так как соответствующие им частоты сопряжения намного больше частоты среза. Обратная связь с передаточной функцией (7.41) реализуется с помощью тахогенератора и дифференцирующей RC-цепи (рис. 7.6, б) с постоянной времени, равной T2. Передаточная функция цепи такой обратной связи имеет вид
где kтг – коэффициент передачи тахогенератора; kуо = k0/(k T2) – коэффициент усиления усилителя в цепи обратной связи. Так как при синтезе системы автоматического сопровождения были допущены упрощения, то необходимо проверить выполнение заданных требований. С этой целью на рис. 7.8 построены ЛЧХ спроектированной системы и ЛЧХ, соответствующие передаточной функции (7.39).
Рис. 7.8 - ЛЧХ системы автосопровождения цели РЛС Из сравнений этих характеристик видно, что выполняются все заданные показатели качества работы системы автоматического сопровождения цели.
|
Последнее изменение этой страницы: 2019-04-10; Просмотров: 500; Нарушение авторского права страницы
 Рис. 7.2 - Способы включения корректирующих устройств
Рис. 7.2 - Способы включения корректирующих устройств , (7.21)
, (7.21) . (7.22)
. (7.22) , (7.23)
, (7.23) , (7.24)
, (7.24) . (7.25)
. (7.25) , (7.26)
, (7.26) . (7.27)
. (7.27) , (7.28)
, (7.28) – постоянный коэффициент.
– постоянный коэффициент.
 , (7.29)
, (7.29) – постоянный коэффициент.
– постоянный коэффициент.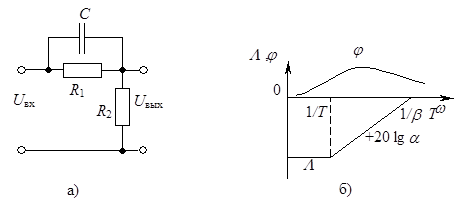
 . (7.30)
. (7.30) ;
;  ;
;  ;
; . (7.31)
. (7.31)
 (7.32)
(7.32) (7.33)
(7.33) , (7.34)
, (7.34) ;
;  ; k1 – коэффициент передачи интегрирующего звена.
; k1 – коэффициент передачи интегрирующего звена.
 , (7.35)
, (7.35) ;
;  . (7.36)
. (7.36)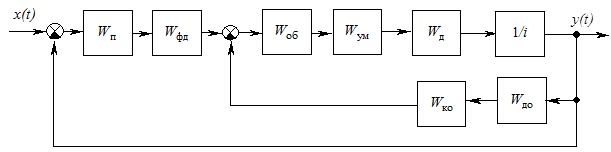
 , (7.37)
, (7.37) ;
;  ;
;  ;
;  - передаточные функции приемника, фазового детектора, усилителя мощности и антенны с двигателем и редуктором.
- передаточные функции приемника, фазового детектора, усилителя мощности и антенны с двигателем и редуктором. . (7.38)
. (7.38) .(7.39)
.(7.39) , (7.40)
, (7.40) , (7.41)
, (7.41) , (7.42)
, (7.42)