
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Структура управляющих устройств на базе микропроцессоровСтр 1 из 9Следующая ⇒
Интерфейсы микропроцессорных устройств При выборе стандарта для построения пространственно распределенных систем автоматического управления реального масштаба времени (САУ РВ) разработчик должен оценить прежде всего следующие параметры [13]: – геометрические размеры сети; – обеспечение гарантированного времени доставки сообщений; – достоверность и надежность передачи информации; – удобство работы с выбранным стандартом в плане стандартизации решений и унификации оборудования; – наличие как можно большего числа стандартизированных уровней из семиуровневой модели взаимодействия открытых систем (OSI); – оптимальное соотношение “возможности/цена”. Параллельные интерфейсы Параллельные интерфейсы характеризуются тем, что в них для передачи бит в слове используются отдельные сигнальные линии, и биты передаются одновременно [5]. Параллельные интерфейсы используют логические уровни ТТЛ, что ограничивает длину кабеля (как правило, не более 5 метров) из-за невысокой помехозащищенности ТТЛ-интерфейса. Гальваническая развязка отсутствует. Поэтому параллельные интерфейсы используются редко — для связи компьютеров с принтерами и организации сети между двумя компьютерами при их близком расположении. Последовательные интерфейсы Последовательный интерфейс для передачи данных использует одну сигнальную линию, по которой информационные биты передаются друг за другом последовательно. Отсюда название интерфейса и порта. Английские термины — Serial Interface и Serial Port. Последовательная передача позволяет сократить количество сигнальных линий и увеличить дальность связи. Характерной особенностью является применение не-ТТЛ сигналов. В ряде последовательных интерфейсов применяется гальваническая развязка внешних (обычно входных) сигналов от схемной земли устройства, что позволяет соединять устройства, находящиеся под разными потенциалами. К таким интерфейсам относятся RS-232, RS-422, RS-485, токовая петля и другие [5]. CAN-интерфейс Контроллер локальной сети (CAN) был разработан автомобильной фирмой Robert Bosh в 1980 году. Этот интерфейс нашел широкое применение в автомобильной технике, системах автоматизации, медицинской технике и т.п. CAN соответствует семиуровневой эталонной модели иерархического представления сети открытых систем (OSI) и поддерживает ее два нижних уровня (рис. 3.8) [4].
Рисунок 3.8. Место интерфейса CAN в модели OSI Физический уровень CAN дает возможность оптимизировать протокол связи для различных сред передачи данных (витая пара, однопроводная линия, оптический кабель, радиоканал, инфракрасное излучение). Международная Организация Стандартов (ISO) и Общество Автомобильных Инженеров (SAE) определили некоторые протоколы связи CAN интерфейса для двух нижних уровней эталонной модели иерархического представления сети: ISO11898 – стандарт для высокоскоростных приложений; ISO11519 – стандарт для низкоскоростных приложений; J1939 (SAE) – использование CAN в автомобильных приложениях. Все три протокола определяют пятивольтовую дифференциальную физическую линию связи. Верхние уровни сетевой модели должны быть поддержаны программным обеспечением. Схема подключения устройств к интерфейсу CAN показана на рис. 3.9 [3].
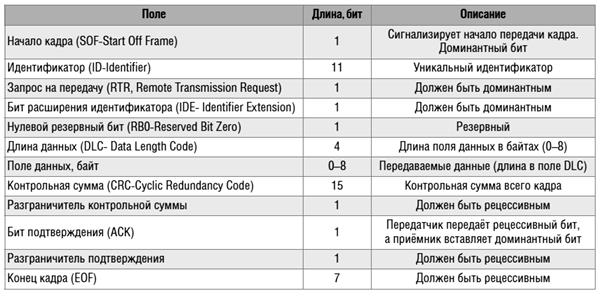
Рисунок 3.9. Схема подключения устройств к интерфейсу CAN Каждый узел сети должен контролировать бездействие шины в течение некоторого времени, прежде чем послать сообщение. Как только обнаружено бездействие шины, все узлы сети имеют равную возможность передать данные. В CAN используется неразрушающий поразрядный арбитраж на шине, сохраняющий сообщение не поврежденным при потере инициативы. Арбитраж позволяет передавать сообщения с высоким приоритетом, без каких-либо задержек и искажений. Логические уровни на шине определяются как ‘dominant’ и ‘recessive’. Узел передачи должен контролировать логическое состояние шины для начала передачи данных. На шине CAN логический бит 0 определяется как ‘dominant’, а бит 1 как ‘recessive’. Бит ‘dominant’ всегда будет выигрывать арбитраж у ‘recessive’ бита, поскольку имеет низкий уровень сигнала и более высокий приоритет. Каждый узел, передающий данные на шины, должен контролировать наличие передаваемого бита на шине. Сообщение с более низким приоритетом будет формировать на шине бит ‘recessive’, а при проверке обнаружит бит ‘dominant’, в этом случае узел, формирующий сообщение более низкого приоритета, теряет арбитраж. Узел, потерявший арбитраж, должен дождаться отсутствия активности на шине и повторить попытку передать данные. В CAN протоколе сообщения не являются адресными, т.е. сообщения не адресуются от одного узла к другому. Сообщение содержит идентификатор источника и собственно данные. Все узлы CAN сети могут принять каждое сообщение на шине и самостоятельно определить: данное сообщение должно быть отвергнуто или обработано. Например, в автомобиле датчик напряжения бортовой сети подключен только к центральному маршрутизатору. Маршрутизатор передает данные, полученные с датчика напряжения, другим узлам автомобиля. При использовании CAN интерфейса все “заинтересованные” узлы получили бы самую “свежую” информацию с датчика напряжения минуя маршрутизатор. Другой полезной особенностью CAN протокола является возможность удаленного запроса данных (RTR). В отличие от предыдущего случая, требуемые данные не ожидаются, когда появятся на шине, а запрашиваются у конкретного узла. Проектировщик может использовать эту особенность для снижения трафика шины при сохранении целостности сети. Добавление нового узла в систему не требует перенастройки остальных устройств сети. Новый узел начинает принимать сообщения из сети на основе их идентификаторов. В CAN протоколе используется 4 типа сообщений. Первый тип (наиболее распространенный) – стандартное сообщение с 11-разрядным идентификатором (рис. 3.10), используется для передачи информации к любому или всем узлам сети. Второй тип сообщений имеет 29-разрядный идентификатор, также используется для удаленного запроса данных (RTR) – показан на рис. 3.11. Два других типа сообщений используются для обработки ошибок.
Рисунок 3.10. Базовый формат кадра данных
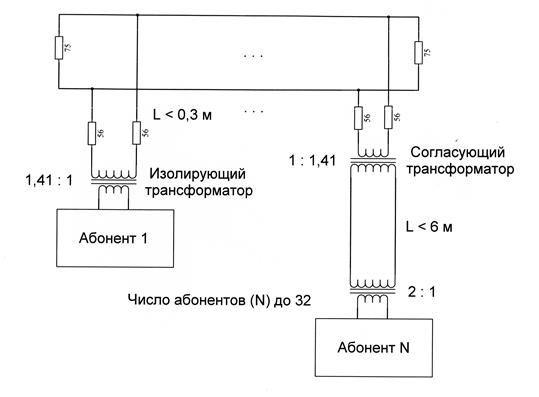
Рисунок 3.11. Расширенный формат кадра данных С появлением новой версии CAN 2.0B, скорость связи увеличилась в 8 раз по сравнению с первым вариантом и составила 1Мбит/с. Поскольку CAN интерфейс первоначально разрабатывался для использования в автомобилях, в его протокол был заложен эффективный механизм обработки ошибок. Протокол позволяет обнаружить большинство ошибок, возникающих во время передачи данных, что сохраняет целостность сообщения с классификацией ошибок как кратковременные и постоянные. CAN узлы могут находиться в нескольких состояниях: активном – при нормальной работе узла, и пассивном – при обнаружении большого количества ошибок. Такой подход гарантирует некоторую пропускную способность шины для критической информации. Неисправный узел не сможет монополизировать всю шину. Протокол CAN оптимизирован для систем, в которых должны передаваться относительно небольшие порции информации (по сравнению с Ethernet или USB, разработанных специально для больших объемов данных), направляемые к любому или всем узлам сети. Множественный доступ с опросом состояния шины позволяет каждому узлу получить доступ к шине с учетом приоритетов. Неадресная структура сообщений позволяет организовать многоабонентскую доставку данных с сокращением трафика шины. Быстрая устойчивая передача информации с системой контроля ошибок позволяет отключать неисправные узлы от шины, что гарантирует доставку критичных по времени сообщений. Серийно выпускаются микросхемы подключения микроконтроллеров к шине CAN, например, микросхема MCP2551 преобразователя последовательных сигналов ТТЛ-уровня в физические уровни сигналов шины CAN. Протокол Манчестер-2 Мультиплексные каналы межмодульного обмена информации (МК), выполненные по MIL-STD-1553B (ГОСТ 26765.52-87, ГОСТ Р 52070-2003), имеют магистральную (шинную) организацию (рис. 3.12).
Рисунок 3.12. Организация связи по стандарту MIL-STD-1553B Здесь для гальванической развязки используется одинарная или двойная трансформаторная развязка. По стандарту все абоненты делятся на два типа: – контроллер канала (KK) — абонент, задающий последовательность операций в МК и контролирующий правильность исполнения команд; – оконечные устройства (ОУ) – абоненты, имеющие собственные адреса, исполняющие команды и выдающие ему ответные слова. Наряду с KK и ОУ возможно подключение к МK “мониторов” – безадресных абонентов, используемых для наблюдения за потоками информации в МK. Функция контроллера может передаваться “интеллектуальным” ОУ. Процедура “передачи жезла” выполняется по командам и называется динамическим управлением каналом. Возможно построение многоуровневых систем управления на базе мультиплексного канала (рис.3.13).
Рисунок 3.13. Мультиуровневая система управления на основе мультиплексного канала Взаимодействие каналов верхних и нижних уровней осуществляется через “шлюзы”, строящиеся на основе ЭВМ. Физической средой распространения сигналов служат витая пара в экране, коаксиальный или триаксиальный кабель с волновым сопротивлением 75 Ом. Информация передается в коде “Манчестер-2” на частоте 1 МГц (Тc=1 мкс). Электрические параметры импульсов показаны на рис. 3.14. Размах сигнала (2Uо) на выходе передатчика составляет 3-10 В, а на входе приемника 1-10 В. Длительность фронта TF сигнала составляет 100…150 нс.
Рисунок 3.14. Электрические и временные параметры сигнала в мультиплексном канале На рис. 3.15 представлена длина линии связи в зависимости от пропускной способности (количество абонентов с длиной линии 3 м).
Рисунок 3.15. Зависимость длины линии связи в зависимости от пропускной способности Простейшим линейным кодом является униполярный код типа NRZ (non return to zero), где нули представлены отсутствием импульса (напряжение примерно ноль), а единицы – наличием импульса (положительное напряжение). Код “Манчестер-2” выполнен на базе этого кода, где единица кодируется отрицательным перепадом сигнала в перепаде битового интервала, ноль – положительным перепадом. Кодировка сигналов иллюстрируется рис. 3.16.
Рисунок 3.16. Кодировка сигналов “Манчестер-2” Форматы команд показаны на рис. 3.17.
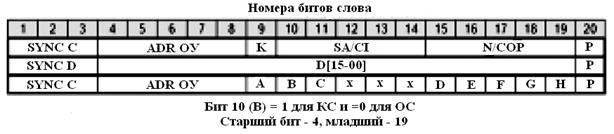
Рисунок 3.17. Форматы слов в мультиплексном канале Все слова подразделяются на три типа: – командные (С); – информационные (D); – ответные (ОС). Наличие в составе слов синхроимпульса (SYNC C или SYNC D) позволяет отличать служебные и информационные слова, при этом в ряде случаев используется инструментальный бит (В), позволяющий “мониторам” различать командные и ответные слова. Наличие пятиразрядного адреса (ADR) позволяет адресовать до 31 оконечного устройства. При этом адрес “11111” используется в качестве признака широковещательного режима (посылка адресована всем абонентам). Kодировка остальных полей: K – признак приема (0) или передачи (1) данных ОУ; SA/CI – поле подадреса (адреса блока данных длиной до 32 слов) или признак команды управления (00000 или 11111); N/COP – поле числа слов в посылке (00001-1, 00010-2, ..., 11111-31, 00000-32) или код команды управления (например, 00000 – принять управление динамическим каналом, 00010 – передать ответное слово и т.д.); А – признак ошибки в сообщении (1); В – инструментальный бит (1 – команда, 0 – ответное слово); С – запрос на обслуживание (1); D – признак принятия групповой команды (1); Е – признак занятости абонента (1); F – флаг неисправности абонента(1); G – признак принятия управления каналом (1); Н – флаг неисправности ОУ(1); Р – бит контроля четности (дополнение числа единиц в слове до нечетного); ХХХ – резервные разряды (используются по системному соглашению). Kодировка поля подадреса позволяет адресовать до 32 блоков данных, при этом подадреса 00000 и 11111 используются для выделения команд управления по отношению к командам обмена информацией. При использовании инструментального бита число подадресов ОУ сокращается с 30 (32 минус код “00000” и “11111”) до 14 соответственно. Форматы сообщений в МК приведены на рис. 3.18. Информация передается в полудуплексном режиме с временным разделением посылок под управлением контроллера по принципу “команда–ответ”.
Рисунок 3.18. Форматы сообщений в мультиплексном канале Read Holding Registers Описание: чтение двоичного содержания регистров в подчиненном. Запрос специфицирует начальный регистр и количество регистров для чтения. Регистры адресуются, начиная с 0. Ниже приведен пример чтения регистров 108-110 с подчиненного устройства 17. Все числа в примере представлены в шестнадцатиричном формате. Запрос: Адрес подчиненного 11. Функция 03. Начальный адрес ст. байт 00. Начальный адрес мл. байт 6С. Кол-во регистров ст. байт 00. Кол-во регистров мл. байт 03. Контрольная сумма --. Данные регистров в ответе передаются как два байта на регистр. Для каждого регистра первый байт содержит старшие биты, второй байт содержит младшие биты. За одно обращение может считываться 125 регистров для контроллеров 984-Х8Х (984-685 и т.д.), и 32 регистра для других контроллеров. Ответ дается, когда все данные укомплектованы. Ответ: Адрес подчиненного 11. Функция 03. Счетчик байт 06. Данные (регистр 108) ст. 02. Данные (регистр 108) мл. 2B. Данные (регистр 109) ст. 00. Данные (регистр 109) мл. 00. Данные (регистр 110) ст. 00. Данные (регистр 110) мл. 64. Контрольная сумма --. Выбор управляющей ЭВМ В качестве управляющих ЭВМ могут использоваться как универсальные ЭВМ (например, PC-подобные в промышленном исполнении, специализированные управляющие ЭВМ), так и промышленные контроллеры, а также встраиваемые системы, выполненные на базе однокристальных микроконтроллеров (однокристальные ЭВМ [2]) или цифровых сигнальных процессоров (реже используются программируемые логические матрицы). К достоинствам управляющих ЭВМ на базе универсальных ВМ можно отнести следующее: возможность использования стандартных языков программирования ЭВМ; доступность программного обеспечения; высокие вычислительные мощности подобных систем. К недостаткам следует отнести отсутствие в таких ЭВМ разветвленных средств ввода/вывода. Здесь будет необходимо подключать разработанные для данной ЭВМ модули расширения. Такие решения могут оказаться достаточно дорогими в реализации. К достоинствам промышленных контроллеров следует отнести наличие для них готовых блоков всевозможных интерфейсов и устройств ввода/вывода, а также простых конструктивных решений для сборки таких систем. К недостаткам подобных систем следует отнести необходимость приобретения специализированного программного обеспечения, а также невысокое быстродействие таких систем при использовании специализированных языков программирования (так как в них уже прошита операционная среда для поддержки языков программирования). К достоинствам управляющих ЭВМ на базе однокристальных микроконтроллеров следует отнести, в первую очередь, невысокую стоимость подобных систем, высокое быстродействие при решении задач управления, наличие большого количества встроенных устройств и интерфейсов. К недостаткам можно отнести необходимость приобретения специализированного программного обеспечения, а также необходимость разработки электроники связи их с объектами управления. Промышленные ЭВМ Для примера можно рассмотреть одноплатные ЭВМ фирмы Avalue Techtologies Inc. (Тайвань) серий ETX, ETX Express, COM Express. Они имеют следующие характеристики: — компактность с полной функциональностью ПК в форматах 3.5” — (146 x 101мм), 5.25” — (203 x 146 мм), Mini-ATX (170 x 170 мм), ATX — (234 х 140 мм); — экономия 60% времени и затрат на разработку; — снижение рисков разработки; — гибкая и масштабируемая производительность; — поддержка современных интерфейсов: LVDS, SATA-II, 8-бит GPIO, 1 Гигабит LAN, 4PCI, PCI Express x16; — рабочий диапазон температур: 0…60ºС, промышленный диапазон по запросу. Также этой же фирмой выпускаются одноплатные компьютеры малого формата 3.25”, 5.25”, EPIC со следующими характеристиками: — компактность: 3.5” — (146 x 101мм), 5.25” — (203 x 146 мм), EPIC — (165 x 115 мм), PC/104 (96 х 90мм); — процессор от высокопроизводительного Intel® Core 2 Duo до экономичного AMD Geode; — поддержка интерфейсов: 2 канала 24-разряда LVDS, DVI, VGA, TFT, 16-бит GPIO, 1 Гб LAN, SATA-II, CF I/II, USB 2.0; — рабочий диапазон температур: 0…60ºС, промышленный диапазон по запросу. На такие компьютеры могут устанавливаться любые существующие в настоящее время операционные системы и соответствующее программное обеспечение. К ним могут подключаться либо стандартные, либо разработанные в промышленном исполнении периферийные устройства. Например, компактные терминалы этой же фирмы типа MTP-1702, MTP-1502 имеют следующие характеристики: — встроенный Intel® Celeron® M 600 МГц процессор; — 15”/17” TFT ЖК дисплей; — небьющийся сенсорный экран (резистивный); — степень защиты передней панели: IP65; — стандартное крепление VESA (75мм); — чтение смарт-карт; — 4 порта USB; — не требуется вентилятор для охлаждения; — антибактериальный пластиковый корпус; — размеры: MTP-1502: 442 x 349 x 70 мм; — размеры: MTP-1702: 457 x 374 x 75 мм. Промышленные контроллеры В России наибольшее распостранение в настоящее время получили промышленные контроллеры европейских (Siemens, Schneider Electric и т.п.) и японских фирм (Omron и т.п.). В качестве примера рассмотрим характеристики контроллера S7-300 фирмы Siemens на примере процессора CPU 312 [14]: — пакет для программирования STEP 7, v5.1+SP4, — встроенная ОЗУ 16 кбт, наружная не поддерживается, — загрузочная память наружная до 4 Мбт, — времена обработки: битовых операций — минимум 0,2 мкс, операций со словами — минимум 0,4 мкс, арифметики с фиксированной точкой — минимум 5 мкс, арифметики с плавающей запятой — минимум 6 мкс, — счетчиков максимум 128, — таймеров максимум 128, — диапазон времени таймеров 10 мс — 9990 с., — функциональных блоков максимум 512, — встроенные часы реального времени, — цифровых каналов максимум 256, — аналоговых каналов максимум 64, — защита программы пользователя, — встроенный интерфейс RS-485. Достаточно широкое распостранение получили также контроллеры, выполненные на базе IBM-совместимых процессоров. В этом случае в такой контроллер, как правило, “зашивается” одна из операционных систем реального времени (например, QNX) и при программировании контроллеров используется один из универсальных языков программирования (С и подобные языки). Как правило, промышленные контроллеры содержат большое число коммуникационных портов, которые позволяют создавать не только локальные системы автоматизации, но и строить на их базе сети, включающие в себя как ЭВМ уровня АСУ предприятия, так и сети на базе промышленных контроллеров. Для примера можно рассмотреть сеть, показанную в документации фирмы “Промконтроллер” (на базе контроллеров P06) [9]:
Рисунок 4.1. Распределенная система на базе промышленных контроллеров IBM-совместимый процессорный модуль Р06 имеет следующие технические характеристики: — центральный процессор – INTEL XScale® IXP420 266/533 МГц; — системное ОЗУ SDRAM РС133 МГц — 32/64 Мбайт; — Flash-память для хранения СПО и прикладных программ — 16/32 Мбайт; — энергонезависимое статическое ОЗУ — 1 Мбайт с питанием от резервной батареи; — астрономический таймер-календарь с питанием от резервной батареи; — сторожевой таймер WatchDog; — два последовательных интерфейса Ethernet IEEE 802.3 10/100 Мбит; — 2 или 6 последовательных интерфейсов UART: СОМ1, СОМ2 или COM1…COM6; — схема контроля напряжения питания и разряда резервной батареи; — перемычки и светодиодные индикаторы конфигурации и состояния; — электропитание процессорного модуля Р06 осуществляется от источника постоянного тока номинальным напряжением 24 В, допустимый входной диапазон напряжения питания 15…30 В; — максимальная потребляемая мощность процессорного модуля не превышает 4,5 или 8,5 Вт в зависимости от исполнения; — испытательное напряжение гальванической развязки между внутренними цепями модуля и сигналом “заземление” разъема питания модуля — 500 В; — испытательное напряжение гальванической развязки между контактами разъема последовательного коммуникационного интерфейса СОМ2 и внутренними цепями модуля — 500 В; — испытательное напряжение гальванической развязки между контактами разъемов последовательных коммуникационных интерфейсов СОМ3...СОМ5 и внутренними цепями модуля — 500 В; — испытательное напряжение гальванической развязки между контактами разъема интерфейса LAN1 и внутренними цепями модуля — 500 В; — испытательное напряжение гальванической развязки между контактами разъема интерфейса LAN2 и внутренними цепями модуля — 500 В; — процессорный модуль Р06 устойчив к воздействию следующих климатических и механических факторов: рабочая температура окружающего воздуха от плюс 5 до плюс 55°С или от минус 40 до плюс 55°С; относительная влажность окружающего воздуха от 10 до 95% при температуре плюс 35°С; атмосферное давление от 84 до 106,7 кПа; вибрация для частот от 5 до 9 Гц с амплитудой смещения 3,5 мм; вибрация для частот от 9 до 150 Гц с ускорением 10 м/с2; — габаритные размеры модуля — не более 159×97×59 мм. Микроконтроллеры Однокристальные микро-ЭВМ со своей архитектурой выпускают практически все ведущие фирмы в области микроэлектроники. Разрядность таких микроконтроллеров варьируется от 8 до 32 бит (реже используются другие разрядности), быстродействие — от единиц до сотен и более миллионов операций в секунду, память программ — от единиц и долей кбт до десятков Мбт, размер встроенного ОЗУ — от единиц байт до десятков Мбт. То есть задача выбора такого устройства представляет собой довольно нетривиальную задачу. Часто в качестве основного критерия выступают в этом случае доступность этого микроконтроллера, доступность программного обеспечения для него, а также и “модность” этого микроконтроллера. Рассмотрим характеристики нескольких микроконтроллеров разных фирм. ► Основные характеристики 8-миразрядного микроконтроллера с RISC-архитектурой ATMega8535 фирмы Atmel (серия AVR) [8]: — общее количество команд — 130, — 32 8-разрядных рабочих регистра, — производительность — до 16 миллионов операций в секунду при тактовой частоте 16 МГц (среднее быстродействие 5 MIPS), — встроенный двухтактовый перемножитель, — 8 кбт Flash-памяти программ, — 512 байт перепрограммируемой памяти данных, — 512 байт ОЗУ, — два 8-разрядных таймера с предделителем, — один 16-разрядный таймер с предделителем, — 4 канала ШИМ, — 10-битный АЦП с коммутатором на 8 каналов, — программируемый последовательный универсальный синхронно-асинхронный приемо-передатчик (USART), — встроенные аппаратные последовательные интерфейсы SPI и I2C, — программируемый сторожевой таймер, — встроенный аналоговый компаратор, — внутренний RC-генератор, — встроенный драйвер управления питанием, — 32 программируемых линии ввода-вывода, — напряжение питания в зависимости от типа от 2,7В до 5,5В, — режимы микропотребления, — внутренние и наружные источники прерываний, — возможность защиты программ и данных от наружного считывания. Данная серия содержит микроконтроллеры с памятью программ до 128 кбт, быстродействием до 7 MIPS, с общим числом линий ввода-вывода до 84. ► Основные характеристики 32-разрядного микроконтроллера с RISC-архитектурой µPD70F3707(3706) фирмы NEC (серия V850): — объем флэш-памяти программ 256 кбт (для контроллера 3706 — 128кбт), — объем ОЗУ 12 кбт, — количество 32-разрядных РОН — 32, — объем адресуемой памяти программ 64 Мбт, — частота тактового генератора — до 5 МГц с возможностью умножения частоты внутри контроллера на 4 (частота до 20 МГц), — минимальное время выполнения инструкции 50 нс (среднее быстродействие 27 MIPS), — количество линий ввода-вывода — 84, — четыре 16-разрядных таймера-счетчика типа P, — два 16-разрядных таймера-счетчика типа Q, — один 16-разрядный таймер временных интервалов типа M, — один сторожевой таймер 2, — один часовой таймер, — 10-разрядный АЦП с коммутатором на 16 каналов, — три канала UART, — два канала последовательного трехпроводного интерфейса CSIB, — четыре контроллера прямого доступа в память, — встроенная функция внутрисхемной отладки программ, — встроенный монитор питания со сбросом микроконтроллера, — векторов прерывания наружных — 12, внутренних — 43, — напряжение питания контроллера — от 3,5В до 5,5В, — рабочий диапазон температур — от -40 до +85°С. Данная серия (V850) содержит микроконтроллеры с памятью программ до 640 кбт, быстродействием до 100 MIPS, с общим числом линий ввода-вывода до 200. Данные контроллеры являются прямыми конкурентами микроконтроллеров на базе ядра ARM7. ► Рассмотрим контроллеры фирмы Atmel на базе ядра ARM7 [10]. Они построены на базе ядра ARM7TDMI. Аббревиатура TDMI означает следующее: – T (Thumb architecture extension) – наличие 16-битного набора команд THUMB; – D (core has Debug extension) – наличие аппаратного доступа к ядру для отладки; – M (core has enhanced Multiplier) – наличие аппаратного умножителя; – I (core has embedded ICE macrocell) – наличие встроенного модуля для подключения внутрисхемного эмулятора. Ядра с обозначением TDMI поддерживают два набора команд – 32-битный набор ARM и 16-битный набор THUMB, являющийся подмножеством набора ARM. В ряде приложений использование набора команд THUMB приводит к уменьшению размера кода и более быстрому выполнению последнего. Сравнительная таблица микроконтроллеров приведена на рис. 4.2.
Рисунок 4.2. Сравнительная таблица параметров контроллеров на базе ядра ARM7 Примечания: SPI – последовательный трехпроводный интерфейс; TWI – последовательный двухпроводный интерфейс (с поддержкой режима I2C); USART – универсальный синхронно-асинхронный последовательный интерфейс; SSC – последовательный трехпроводный интерфейс (с поддержкой режима I2S). Контроллеры поддерживают также работу с сетью Ethernet 10/100. ► Рассмотрим контроллеры фирмы Atmel на базе ядра ARM9 [11]. Они построены на базе ядра ARM9TDMI. Ядро ARM9TDMI является развитием ARM7ТDMI и совместимо с ним на уровне исходных кодов. В отличие от микросхем ARM7, контроллеры на ядре ARM9, как правило, имеют на кристалле кэш-память команд и данных, что повышает общую производительность процессора. Корпорация ATMEL выпускает ряд моделей таких микроконтроллеров (см. табл. на рис.4.3).
Рисунок 4.3. Сравнительная таблица параметров контроллеров на базе ядра ARM9 “Родоначальником” семейства ARM9 у ATMEL является микроконтроллер AT91RM9200, построенный на ядре ARM920ТDMI. При тактовой частоте 180 МГц эти контроллеры имеют производительность примерно 200 MIPS. Все микросхемы имеют раздельное питание ядра и периферийных модулей 1,8 и 3,3 В соответственно. Причём напряжение питания ядра можно изменять в диапазоне 1,65…1,95 В, управляя таким образом потребляемой мощностью и тактовой частотой ядра контроллера. Такое сочетание параметров позволяет применять микроконтроллеры ARM9 в самых разных приложениях, в том числе для построения низкопотребляющих систем, работающих в режиме реального времени. Все микроконтроллеры Atmel семейства ARM9 содержат модуль управления памятью (MMU, Memory Management Unit). Этот модуль необходим для полноценной работы операционных систем класса Linux или Windows. Контроллеры поддерживают также работу с сетью Ethernet 10/100. Контроллеры могут поддерживать внешнюю интерфейсную шину (EBI) – поддержка памяти SDRAM, Burst Flash, CompactFlash, SmartMedia и NAND Flash. Поскольку при выполнении команд используется кэш-память, то при управлении в реальном времени могут возникать задержки реакции системы на прерывания (впрочем, весьма небольшие). Библиографический список 1. Антошина, И.В. Микропроцессоры и микропроцессорные системы. Аналитический обзор. / И.В. Антошина, Ю.Т. Котов. — М.: Московский государственный университет леса, кафедра электроники и микропроцессорной техники, 2005. — 432с. 2. Боборыкин, А.В. Однокристальные микроЭВМ. / А.В. Боборыкин, Г.П. Липовецкий, Г.В. Литвинский и др.— М.: МИКАП, 1994. — 400с. 3. Вальпа, О. Микроконтроллеры и CAN-интерфейс. / О. Вальпа // Современная электроника, 2011. – №7. –С.42-49. 4. Введение в CAN 2.0B интерфейс. / ООО “Микро-Чип”, М.: 2001. – Информационный ресурс www.microchip.ru. Доступно 2.09.2013. 5. Гук, М. Интерфейсы ПК: справочник. / М. Гук. — СПб: Питер Ком, 1999. — 416с. 6. Мартин, Дж. Программирование для вычислительных систем реального времени. / Дж. Мартин. — М.: Наука, 1975. — 360с. 7. Цилькер, Б.Я. Организация ЭВМ и систем: Учебник для вузов. / Б.Я. Цилькер, С.А. Орлов. — СПб.: Питер, 2004. — 668с.: ил. 8. Евстифеев, А.В. Микроконтроллеры AVR семейств Tiny и Mega фирмы Atmel. / А.В. Евстифеев. — М.: Издательский дом “Додэка-XXI”, 2005. — 560с. 9. Информационный ресурс www.tecon.ru. Доступно 2.09.2013. 10. Королев, Н. 32-разрядные микроконтроллеры ATMEL на базе ядра ARM7. / Н. Королев. // Компоненты и технологии, №6, 2006. 11. Королев, Н. 32-разрядные микроконтроллеры ATMEL на базе ядра ARM9. / Н. Королев. // Современная электроника, №4, 2007. 12. Петров, И.В. Программируемые контроллеры. Стандартные языки и приемы прикладного программирования. / И.В. Петров. — М.: СОЛОН-Пресс, 2004. — 256с. 13. Хвощ, С.Т. Промышленные сети на базе стандарта MIL-STD-1553B. / С.Т. Хвощ, Х.Х Амаду. // СТА, №1, 1999. — с.42-45. 14. Siemens. Simatic. Программируемый контроллер S7-300. Данные CPU, CPU 31xC и CPU 31x. Справочное руководство. Оглавление 1. Структура управляющих устройств на базе микропроцессоров.. 3 2. Структура ЭВМ в управляющих микропроцессорных устройствах.. 7 3. Интерфейсы микропроцессорных устройств.. 11 3.1. Параллельные интерфейсы.. 11 3.2. Последовательные интерфейсы.. 12 3.2.1. Способы последовательной передачи. 12 3.2.2. Реализации асинхронного интерфейса. 14 3.2.3. Реализации синхронного интерфейса. 15 3.2.4. Реализации изохронного интерфейса. 19 3.2.5. CAN-интерфейс. 20 3.2.6. Протокол Манчестер-2. 24 3.2.7. Протокол высокого уровня MODBUS. 29 3.3. Особенности использования шин. 32 4. Выбор управляющей ЭВМ... 34 4.1. Промышленные ЭВМ... 35 4.2. Промышленные контроллеры.. 36 4.3. Микроконтроллеры.. 38 5. Программирование управляющих микропроцессорных устройств.. 42 5.1. Программирование промышленных контроллеров. 42 5.2. Программирование микроконтроллеров. 47 Библиографический список. 57
Структура управляющих устройств на базе микропроцессоров Системы управления объектами могут строиться на базе одного управляющего устройства, соединенного с объектом управления (ОУ) несколькими каналами связи. Обобщенная структура такой системы управления показана на рис. 1.1.
Рис. 1.1. Структура системы на базе одного микропроцессора В качестве управляющего устройства системы может использоваться микропроцессорный контроллер (МК), построенный на базе микропроцессора определенного типа. Информация о состоянии объекта управления передается в микропроцессорный контроллер через блок нормирующих преобразователей (БН), коммутатор (К) и аналого-цифровой преобразователь (АЦП). Нормирующие преобразователи используются в системе для согласования уровней информационных сигналов на выходе объекта управления с уровнями входных сигналов коммутатора. Аналого-цифровой преобразователь служит для преобразования аналоговых сигналов с выхода объекта в цифровой код. После преобразования цифровой информации о состоянии объекта управления по определенному алгоритму, обычно содержащемуся в памяти МК, вырабатываются управляющие воздействия, которые поступают на вход объекта управления через цифроаналоговый преобразователь (ЦАП) и исполнительное устройство (ИУ). Заметим, что, если мультиплексирование входных сигналов ОУ на входе АЦП возможно практически всегда, то мультиплексирование управляющих сигналов на входе МК часто недопустимо. Такая структура управляющей системы объясняется необходимостью запоминания каждого управляющего воздействия. Следует заметить, что среди выходных сигналов объектов управления аналогового типа могут быть и дискретные сигналы. Ввод таких сигналов в микропроцессорный контроллер осуществляется через блок формирования сигнала (БФС), назначение которого — согласовать их уровни и мощности с входными цепями микропроцессорного контроллера. При наличии нескольких дискретных сигналов для их ввода в МК можно использовать мультиплексирование. При наличии на входе объекта управления исполнительного устройства дискретного типа (ИУД) (усилители мощности, тиристорные преобразователи, работающие в ключевом режиме), управляющее воздействие формируется в микропроцессорный контроллер и подается в ИУД без использования ЦАП. Система управления может решать различные задачи: поддержание на определенном уровне или изменение по определенному закону выходных параметров объекта управления; программное изменение выходных параметров объекта и отслеживание их изменений в соответствии с некоторыми внешними сигналами; отслеживание их изменений в соответствии с некоторыми внешними сигналами и другие. Центральное место в рассматриваемой системе занимает микропроцессорный контроллер, а остальные элементы — БН, К, АЦП, ЦАП и ИУ — обеспечивают связь микропроцессорного контроллера с объектом управления. Часто их объединяют одним общим названием — устройство связи с объектом (УСО). Конструктивно все элементы системы могут располагаться на одной плате, которая размещается в конструктиве объекта управления. Контроллер может быть выполнен на базе определенного типа микропроцессора и нескольких микросхем подкрепления. При использовании МК как встроенного средства управления в отдельно взятые объекты технические параметры микропроцессорного контроллера и УСО могут быть неунифицированными, и, следовательно, системы управления различных объектов не взаимозаменяемы. Общая стоимость автоматизированной системы при этом становится значительной. Для снижения затрат на систему управления возможно использование одного универсального комплекта МК и УСО, которые при необходимости могут быть подключены к любому из объектов. Такой подход к автоматизации особенно целесообразен, когда потребитель является обладателем бытовой ПЭВМ. Небольшим набором средств сопряжения с объектом можно обеспечить в этом случае решение многих задач. Объекты управления могут объединяться в группы, которые составляют технологическую линию. Системы управления объектами этого класса могут строиться по тому же принципу, составляя совокупность одноконтурных систем управления данного уровня (рис. 1.2).
Рис. 1.2. Структура системы на базе нескольких микропроцессоров В этом случае каждая локальная система управления одним из объектов работает независимо от других систем. При необходимости информация о состоянии объектов может быть передана в центральное вычислительное устройство для решения некоторых общих для группы объектов управляющих задач. Задачи, решаемые микропроцессорной системой управления (МПСУ), могут зависеть от характера входных воздействий, поступающих в систему. Так, например, управление роботом может осуществляться по разным алгоритмам в зависимости от результата решения задачи распознавания представленного роботу объекта. В этом и подобных случаях структура МПСУ оказывается переменной. В микропроцессорных системах она перестраивается программно. Сложные объекты управления (самолеты, космические аппараты, прокатные станы, роторные конвейерные линии и т. п.) представляют собой совокупность взаимосвязанных многорежимных управляемых систем, объединенных единой системой управления. Основополагающими принципами, определяющими структуру МПСУ подобными объектами, является иерархичность, независимость управления по уровням иерархии и информационная замкнутость. Обобщенная структура иерархической МПСУ показана на рис. 1.3 [1].
Рис. 1.3. Структура иерархической МПСУ Здесь с объектами управления (ОУ) связаны микроконтроллеры (МК), а они по иерархии — с ЭВМ разного уровня. В качестве примера можно рассмотреть систему управления робота-манипулятора. У него есть несколько звеньев, а в качестве входного воздействия используются положения схвата. При управлении только пространственным положением последнего звена можно записать уравнение
Рис. 1.4. Общая структура системы управления робота-манипулятора На вход основной ЭВМ поступают (или вычисляются ей же) требуемые положения конечного звена робота-манипулятора. Основная ЭВМ запрашивает у контроллеров каждого звена их положения и, зная требуемое положение конечного звена, вычисляет новые их значения. Эти значения она отсылает для отработки в контроллеры систем управления звеньев робота. Эти контроллеры постоянно контролируют положения звеньев и осуществляют замыкание обратных связей локальных систем управления (возможно, с какими-либо регуляторами). Также при необходимости контроллеры производят ограничение положения звеньев и сообщают об этой ситуации в основную ЭВМ. В результате у нас получилась иерархическая структура с двумя уровнями иерархии. Сама задача у нас определила структуру микропроцессорной системы. Но, кроме этого, на структуру может повлиять такой параметр, как интегральные характеристики управляющих микропроцессоров. В данной задаче, например, контроллеры систем управления звеньев робота-манипулятора могут иметь невысокие быстродействие, объемы памяти и пр. А вот основная ЭВМ должна решать задачу преобразования координат в реальном масштабе времени, поэтому она должна обладать высоким быстродействием при решении математических задач и, кроме того, иметь скоростные интерфейсы связи с управляющими микропроцессорами и с наружным оборудованием. При недостатке этих ресурсов, возможно, придется вместо одной ЭВМ использовать систему ЭВМ, соединенных друг с другом каким-либо образом. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 363; Нарушение авторского права страницы














 , где
, где  – текущие положения звеньев механизма. Из формулы видно, что при этих условиях структура системы управления может иметь вид, показанный на рис. 1.4.
– текущие положения звеньев механизма. Из формулы видно, что при этих условиях структура системы управления может иметь вид, показанный на рис. 1.4.