|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Реализации изохронного интерфейса
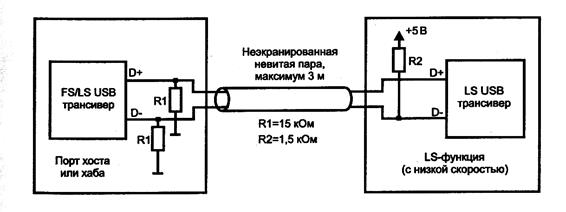
Они применяются, как правило, для обмена между микропроцессорными устройствами и персональными компьютерами. К таким интерфейсам, например, относятся шины USB и FireWire. Вообще, шина — это набор проводов, обладающих некими общими свойствами. Шина предназначена для передачи информации между частями микропроцессорных устройств и передачи данных внутри устройства. Шина содержит линии передачи информации и, возможно, линии синхронизации. Характерной особенностью шины является то, что к ней можно параллельно подключить несколько устройств. USB (Universal Serial Bus — универсальная последовательная шина) является промышленным стандартом расширения архитектуры PC, ориентированным на интеграцию с телефонией и устройствами бытовой электроники. Версия 1.0 была опубликована в январе 1996 года. Архитектура USB определяется следующими критериями: — легко реализуемое расширение периферии PC, — дешевое решение, поддерживающее скорость передачи до 12 Мбит/с. (400 Мбит/с. для спецификации 2.0), — полная поддержка в реальном времени передачи аудио и (сжатых) видеоданных, — гибкость протокола смешанной передачи изохронных данных и асинхронных сообщений, — интеграция с выпускаемыми устройствами. — обеспечение стандартного интерфейса, способного быстро завоевать рынок. — возможность создания новых классов устройств. C точки зрения конечного пользователя, привлекательны следующие черты USB: — простота кабельной системы и подключений, — скрытие подробностей электрического подключения от конечного пользователя, — самоидентифицирующиеся периферийные устройства, автоматическая связь устройств с драйверами и конфигурирование, — возможность динамического подключения и конфигурирования периферийного устройства. В настоящее время выпускаются микроконтроллеры со встроенным интерфейсом USB, а также блоки USB для промышленных контроллеров. На рисунках 3.6 и 3.7 показано подключение устройств по шине USB.
Рисунок 3.6. Подключение полноскоростного устройства
Рисунок 3.7. Подключение низкоскоростного устройства Шина FireWire ориентирована на интенсивный обмен между подключенными к ней устройствами. Она используется, как правило, при необходимости передавать видеоданные в реальном времени. CAN-интерфейс Контроллер локальной сети (CAN) был разработан автомобильной фирмой Robert Bosh в 1980 году. Этот интерфейс нашел широкое применение в автомобильной технике, системах автоматизации, медицинской технике и т.п. CAN соответствует семиуровневой эталонной модели иерархического представления сети открытых систем (OSI) и поддерживает ее два нижних уровня (рис. 3.8) [4].
Рисунок 3.8. Место интерфейса CAN в модели OSI Физический уровень CAN дает возможность оптимизировать протокол связи для различных сред передачи данных (витая пара, однопроводная линия, оптический кабель, радиоканал, инфракрасное излучение). Международная Организация Стандартов (ISO) и Общество Автомобильных Инженеров (SAE) определили некоторые протоколы связи CAN интерфейса для двух нижних уровней эталонной модели иерархического представления сети: ISO11898 – стандарт для высокоскоростных приложений; ISO11519 – стандарт для низкоскоростных приложений; J1939 (SAE) – использование CAN в автомобильных приложениях. Все три протокола определяют пятивольтовую дифференциальную физическую линию связи. Верхние уровни сетевой модели должны быть поддержаны программным обеспечением. Схема подключения устройств к интерфейсу CAN показана на рис. 3.9 [3].
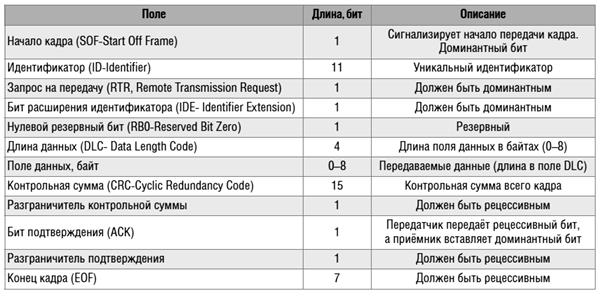
Рисунок 3.9. Схема подключения устройств к интерфейсу CAN Каждый узел сети должен контролировать бездействие шины в течение некоторого времени, прежде чем послать сообщение. Как только обнаружено бездействие шины, все узлы сети имеют равную возможность передать данные. В CAN используется неразрушающий поразрядный арбитраж на шине, сохраняющий сообщение не поврежденным при потере инициативы. Арбитраж позволяет передавать сообщения с высоким приоритетом, без каких-либо задержек и искажений. Логические уровни на шине определяются как ‘dominant’ и ‘recessive’. Узел передачи должен контролировать логическое состояние шины для начала передачи данных. На шине CAN логический бит 0 определяется как ‘dominant’, а бит 1 как ‘recessive’. Бит ‘dominant’ всегда будет выигрывать арбитраж у ‘recessive’ бита, поскольку имеет низкий уровень сигнала и более высокий приоритет. Каждый узел, передающий данные на шины, должен контролировать наличие передаваемого бита на шине. Сообщение с более низким приоритетом будет формировать на шине бит ‘recessive’, а при проверке обнаружит бит ‘dominant’, в этом случае узел, формирующий сообщение более низкого приоритета, теряет арбитраж. Узел, потерявший арбитраж, должен дождаться отсутствия активности на шине и повторить попытку передать данные. В CAN протоколе сообщения не являются адресными, т.е. сообщения не адресуются от одного узла к другому. Сообщение содержит идентификатор источника и собственно данные. Все узлы CAN сети могут принять каждое сообщение на шине и самостоятельно определить: данное сообщение должно быть отвергнуто или обработано. Например, в автомобиле датчик напряжения бортовой сети подключен только к центральному маршрутизатору. Маршрутизатор передает данные, полученные с датчика напряжения, другим узлам автомобиля. При использовании CAN интерфейса все “заинтересованные” узлы получили бы самую “свежую” информацию с датчика напряжения минуя маршрутизатор. Другой полезной особенностью CAN протокола является возможность удаленного запроса данных (RTR). В отличие от предыдущего случая, требуемые данные не ожидаются, когда появятся на шине, а запрашиваются у конкретного узла. Проектировщик может использовать эту особенность для снижения трафика шины при сохранении целостности сети. Добавление нового узла в систему не требует перенастройки остальных устройств сети. Новый узел начинает принимать сообщения из сети на основе их идентификаторов. В CAN протоколе используется 4 типа сообщений. Первый тип (наиболее распространенный) – стандартное сообщение с 11-разрядным идентификатором (рис. 3.10), используется для передачи информации к любому или всем узлам сети. Второй тип сообщений имеет 29-разрядный идентификатор, также используется для удаленного запроса данных (RTR) – показан на рис. 3.11. Два других типа сообщений используются для обработки ошибок.
Рисунок 3.10. Базовый формат кадра данных
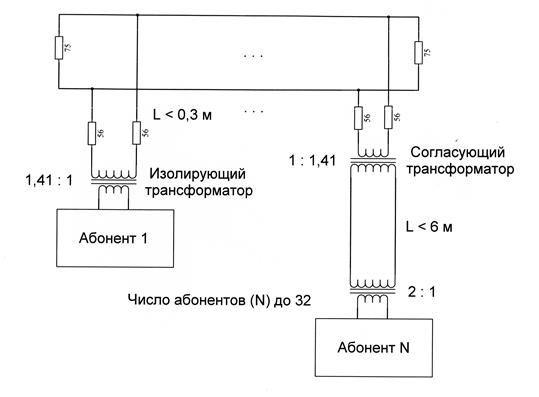
Рисунок 3.11. Расширенный формат кадра данных С появлением новой версии CAN 2.0B, скорость связи увеличилась в 8 раз по сравнению с первым вариантом и составила 1Мбит/с. Поскольку CAN интерфейс первоначально разрабатывался для использования в автомобилях, в его протокол был заложен эффективный механизм обработки ошибок. Протокол позволяет обнаружить большинство ошибок, возникающих во время передачи данных, что сохраняет целостность сообщения с классификацией ошибок как кратковременные и постоянные. CAN узлы могут находиться в нескольких состояниях: активном – при нормальной работе узла, и пассивном – при обнаружении большого количества ошибок. Такой подход гарантирует некоторую пропускную способность шины для критической информации. Неисправный узел не сможет монополизировать всю шину. Протокол CAN оптимизирован для систем, в которых должны передаваться относительно небольшие порции информации (по сравнению с Ethernet или USB, разработанных специально для больших объемов данных), направляемые к любому или всем узлам сети. Множественный доступ с опросом состояния шины позволяет каждому узлу получить доступ к шине с учетом приоритетов. Неадресная структура сообщений позволяет организовать многоабонентскую доставку данных с сокращением трафика шины. Быстрая устойчивая передача информации с системой контроля ошибок позволяет отключать неисправные узлы от шины, что гарантирует доставку критичных по времени сообщений. Серийно выпускаются микросхемы подключения микроконтроллеров к шине CAN, например, микросхема MCP2551 преобразователя последовательных сигналов ТТЛ-уровня в физические уровни сигналов шины CAN. Протокол Манчестер-2 Мультиплексные каналы межмодульного обмена информации (МК), выполненные по MIL-STD-1553B (ГОСТ 26765.52-87, ГОСТ Р 52070-2003), имеют магистральную (шинную) организацию (рис. 3.12).
Рисунок 3.12. Организация связи по стандарту MIL-STD-1553B Здесь для гальванической развязки используется одинарная или двойная трансформаторная развязка. По стандарту все абоненты делятся на два типа: – контроллер канала (KK) — абонент, задающий последовательность операций в МК и контролирующий правильность исполнения команд; – оконечные устройства (ОУ) – абоненты, имеющие собственные адреса, исполняющие команды и выдающие ему ответные слова. Наряду с KK и ОУ возможно подключение к МK “мониторов” – безадресных абонентов, используемых для наблюдения за потоками информации в МK. Функция контроллера может передаваться “интеллектуальным” ОУ. Процедура “передачи жезла” выполняется по командам и называется динамическим управлением каналом. Возможно построение многоуровневых систем управления на базе мультиплексного канала (рис.3.13).
Рисунок 3.13. Мультиуровневая система управления на основе мультиплексного канала Взаимодействие каналов верхних и нижних уровней осуществляется через “шлюзы”, строящиеся на основе ЭВМ. Физической средой распространения сигналов служат витая пара в экране, коаксиальный или триаксиальный кабель с волновым сопротивлением 75 Ом. Информация передается в коде “Манчестер-2” на частоте 1 МГц (Тc=1 мкс). Электрические параметры импульсов показаны на рис. 3.14. Размах сигнала (2Uо) на выходе передатчика составляет 3-10 В, а на входе приемника 1-10 В. Длительность фронта TF сигнала составляет 100…150 нс.
Рисунок 3.14. Электрические и временные параметры сигнала в мультиплексном канале На рис. 3.15 представлена длина линии связи в зависимости от пропускной способности (количество абонентов с длиной линии 3 м).
Рисунок 3.15. Зависимость длины линии связи в зависимости от пропускной способности Простейшим линейным кодом является униполярный код типа NRZ (non return to zero), где нули представлены отсутствием импульса (напряжение примерно ноль), а единицы – наличием импульса (положительное напряжение). Код “Манчестер-2” выполнен на базе этого кода, где единица кодируется отрицательным перепадом сигнала в перепаде битового интервала, ноль – положительным перепадом. Кодировка сигналов иллюстрируется рис. 3.16.
Рисунок 3.16. Кодировка сигналов “Манчестер-2” Форматы команд показаны на рис. 3.17.
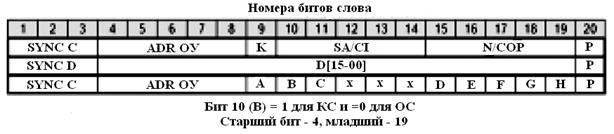
Рисунок 3.17. Форматы слов в мультиплексном канале Все слова подразделяются на три типа: – командные (С); – информационные (D); – ответные (ОС). Наличие в составе слов синхроимпульса (SYNC C или SYNC D) позволяет отличать служебные и информационные слова, при этом в ряде случаев используется инструментальный бит (В), позволяющий “мониторам” различать командные и ответные слова. Наличие пятиразрядного адреса (ADR) позволяет адресовать до 31 оконечного устройства. При этом адрес “11111” используется в качестве признака широковещательного режима (посылка адресована всем абонентам). Kодировка остальных полей: K – признак приема (0) или передачи (1) данных ОУ; SA/CI – поле подадреса (адреса блока данных длиной до 32 слов) или признак команды управления (00000 или 11111); N/COP – поле числа слов в посылке (00001-1, 00010-2, ..., 11111-31, 00000-32) или код команды управления (например, 00000 – принять управление динамическим каналом, 00010 – передать ответное слово и т.д.); А – признак ошибки в сообщении (1); В – инструментальный бит (1 – команда, 0 – ответное слово); С – запрос на обслуживание (1); D – признак принятия групповой команды (1); Е – признак занятости абонента (1); F – флаг неисправности абонента(1); G – признак принятия управления каналом (1); Н – флаг неисправности ОУ(1); Р – бит контроля четности (дополнение числа единиц в слове до нечетного); ХХХ – резервные разряды (используются по системному соглашению). Kодировка поля подадреса позволяет адресовать до 32 блоков данных, при этом подадреса 00000 и 11111 используются для выделения команд управления по отношению к командам обмена информацией. При использовании инструментального бита число подадресов ОУ сокращается с 30 (32 минус код “00000” и “11111”) до 14 соответственно. Форматы сообщений в МК приведены на рис. 3.18. Информация передается в полудуплексном режиме с временным разделением посылок под управлением контроллера по принципу “команда–ответ”.
Рисунок 3.18. Форматы сообщений в мультиплексном канале |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 373; Нарушение авторского права страницы