
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Поступательное движение твердого тела. Закон движения.Стр 1 из 18Следующая ⇒
Рис.1 При движении точки М вектор
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор Геометрическое место концов вектора 2. Координатный способ задания движения точки. Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.1), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т. е. знать зависимости
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения. Чтобы получить уравнение траектории надо из уравнений движения исключить параметр Нетрудно установить зависимость между векторным и координатным способами задания движения. Разложим вектор
где Так как начало
Пример 1. Движение точки задано уравнениями
Чтобы исключить время, параметр t, найдём из первого уравнения Начальное положение точки M0 (при t=0) определяется координатами Рис.2 Через 1 сек. точка будет в положении M1 с координатами
Примечание. Движение точки может быть задано с помощью и других координат. Например, цилиндрических или сферических. Среди них будут не только линейные размеры, но и углы. При необходимости, с заданием движения цилиндрическими и сферическими координатами можно познакомиться по учебникам. 3. Естественный способ задания движения точки.
Рис.3
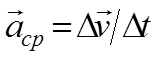
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.3) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси). Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О' до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M1, М2,... . следовательно, расстояние s будет с течением времени изменяться. 3. Определение скорости и ускорения точки при векторном способе задания движения. Вектор скорости точки Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки. Известно, что при движении точки по прямой линии с постоянной скоростью, равномерно, скорость её определяется делением пройденного расстояния s на время:
Рис. 5
в момент времени t в положении М, определяемом радиусом-вектором Отношение вектора перемещения точки к соответствующему промежутку времени дает векторную величину, называемую средней по модулю и направлению скоростью точки за промежуток времени
Скоростью точки в данный момент времени
Итак, вектор скорости точки в данный момент времени равен первой производной от радиуса-вектора точки по времени. Так как предельным направлением секущей ММ1 является касательная, то вектор скорости точки в данный момент времени направлен по касательной к траектории точки в сторону движения. Вектор ускорения точки Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Пусть в некоторый момент времени
Рис.6
Тогда за промежуток времени Отношение приращения вектора скорости
Вектор среднего ускорения имеет то же направление, что и вектор Ускорением точки в данный момент времени t называется векторная величина Найдем, как располагается вектор
4. Определение скорости и ускорения точки при координатном способе задания движения. Вектор скорости точки
Таким образом, проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени. Зная проекции скорости, найдем ее модуль и направление (т.е. углы
Итак, численная величина скорости точки в данный момент времени равна первой производной от расстояния (криволинейной координаты) s точки по времени. Направлен вектор скорости по касательной к траектории, которая нам наперед известна. Определение ускорения при координатном способе задания движения Вектор ускорения точки
или
т.е. проекция ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул
где Пример 3. Движение точки задано уравнениями Из первого уравнения Это уравнение параболы. В начале движения, при А, например, при t =0,5 c она будет в положении M с координатами Проекции скорости на оси При И модуль скорости Составляющие скорости по осям и вектор её показаны в масштабе на рис. 7.
Рис.7 Проекции ускорения
5. Определение скорости и ускорения точки при естественном способе задания движения. Величину скорости можно определить как предел (
где Следовательно, скорость точки есть первая производная по времени от закона движения:
Направлен вектор скорости, как было установлено ранее, по касательной к траектории. Если величина скорости в данный момент будет больше нуля, то вектор скорости направляется в положительном направлении Определение ускорения при естественном способе задания движения. Касательное и нормальное ускорение точки При естественном способе задания движения вектор
Рис.8
Было показано, что ускорение точки Вычислим проекции Тогда по определению
Перейдем в этом равенстве от векторов к их проекциям на оси
Учитывая, что проекция вектора на параллельные оси одинаковы, проведем через точку М1 оси Напомним, что предел отношения угла смежности
Обращаясь теперь к чертежу (рис.9), находим, что проекции векторов
где Следовательно,
Заметим что при
Тогда, учитывая, что в пределе
Правую часть выражения
так как пределы каждого из стоящих в скобке сомножителей при
Окончательно получаем:
Итак, мы доказали, что проекция ускорения точки на касательную равна первой производной от численной величины скорости или второй производной от расстояния (криволинейной координаты) s no времени, а проекция ускорения на главную нормаль равна квадрату скорости деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю (
Рис.9
Отложим вдоль касательной Вектор ускорения точки
Рис.11 Рис.12
Поступательно движутся педали велосипеда относительно его рамы во время движения, поршни в цилиндрах двигателя внутреннего сгорания относительно цилиндров, кабины колеса обозрения в парках относительно Земли.
Свойства поступательного движения определяются следующей теоремой: при поступательном движении все точки тела описывают одинаковые (при наложении совпадающие) траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения. Для доказательства рассмотрим твердое тело, совершающее поступательное движение относительно системы отсчета Oxyz. Возьмем в теле две произвольные точки А и В, положения которых в момент времени t определяются радиусами-векторами Проведем вектор Тогда При этом длина АВ постоянна, как расстояние между точками твердого тела, а направление АВ остается неизменным, так как тело движется поступательно. Таким образом, вектор АВ во все время движения тела остается постоянным ( Для нахождения скоростей точек А и В продифференцируем обе части равенства по времени. Получим
Но производная от постоянного вектора АВ равна нулю. Производные же от векторов
т.е. что скорости точек А и В тела в любой момент времени одинаковы и по модулю, и по направлению. Беря от обеих частей полученного равенства производные по времени:
Следовательно, ускорения точек А и В тела в любой момент времени тоже одинаковы по модулю и направлению. Так как точки А и В были выбраны произвольно, то из найденных результатов следует, что у всех точек тела их траектории, а также скорости и ускорения в любой момент времени будут одинаковы. Таким образом, теорема доказана. Из теоремы следует, что поступательное движение твердого тела определяется движением какой-нибудь одной из его точки. Следовательно, изучение поступательного движения тела сводится к задаче кинематике точки, нами уже рассмотренной. При поступательном движении общую для всех точек тела скорость Заметим, что понятие о скорости и ускорении тела имеют смысл только при поступательном движении. Во всех остальных случаях точки тела, как мы увидим, движутся с разными скоростями и ускорениями, и термины <<скорость тела>> или <<ускорение тела>> для этих движений теряют смысл. Закон движения — математическая формулировка того, как движется тело или как происходит движение более общего вида или набор зависимостей, которые выявляют все данные о движении точки. В классической механике материальной точки закон движения представляет собой три зависимости трёх пространственных координат от времени, либо зависимость одной векторной величины (радиус-вектора) от времени, вида
Закон движения может быть найден, в зависимости от задачи, либо из дифференциальных законов механики (см. Законы Ньютона), либо из интегральных (см. Закон сохранения энергии, Закон сохранения импульса), либо из так называемых вариационных принципов. Рис.13 Тогда положение тела в любой момент времени однозначно определится взятым с соответствующим знаком углом
Уравнение выражает закон вращательного движения твердого тела вокруг неподвижной оси. Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость Если за промежуток времени
Таким образом, числовое значение угловой скорости тела в данный момент времени равно первой производной от угла поворота по времени. Знак Размерность угловой скорости 1/Т (т.е. 1/время); в качестве единицы измерения обычно применяют рад/с или, что тоже, 1/с (с-1), так как радиан - величина безразмерная. Угловую скорость тела можно изобразить в виде вектора
Рис.14
Угловое ускорение характеризует изменение с течением времени угловой скорости тела. Если за промежуток времени
Таким образом, числовое значение углового ускорения, тела в данный момент времени равно первой производной от угловой скорости или второй производной от угла поворота тела по времени. Размерность углового ускорения 1/T2 (1/время2); в качестве единицы измерения обычно применяется рад/с2 или, что то же, 1/с2 (с-2). Если модуль угловой скорости со временем возрастает, вращение тела называется ускоренным, а если убывает, - замедленным. Легко видеть, что вращение будет ускоренным, когда величины Угловое ускорение тела (по аналогии с угловой скоростью) можно также изобразить в виде вектора
Направление
Рис.15 Рис. 16 2. Ускорения точек тела. Для нахождения ускорения точки М воспользуемся формулами В нашем случае
или окончательно:
Касательная составляющая ускорения Отклонение вектора полного ускорения от радиуса описываемой точкой окружности определяется углом Так как
Рис.17 Рис.18
3. Векторы скорости и ускорения точек тела. Чтобы найти выражения непосредственно для векторов
Таким образом, модуль векторного произведения Пример 5. Маятник
Рис.19
Маятник вращается вокруг горизонтальной оси Например, при Скорость точки
 
касательное ускорение Величина полного ускорения точки
Рис.28 Рис.29
Рассмотрим сечение S тела какой-нибудь плоскости О xy, параллельной плоскости П (рис.29). При плоскопараллельном движении все точки тела, лежащие на прямой ММ’, перпендикулярной течению S, т. е. плоскости П, движутся тождественно. Отсюда заключаем, что для изучения движения всего тела достаточно изучить, как движется в плоскости Оху сечение S этого тела или некоторая плоская фигура S. Поэтому в дальнейшем вместо плоского движения тела будем рассматривать движение плоской фигуры S в ее плоскости, т.е. в плоскости Оху. Положение фигуры S в плоскости Оху определяется положением какого-нибудь проведенного на этой фигуре отрезка АВ (рис. 28). В свою очередь положение отрезка АВ можно определить, зная координаты При движении фигуры величины
Уравнения, определяющие закон происходящего движения, называются уравнениями движения плоской фигуры в ее плоскости. Они же являются уравнениями плоскопараллельного движения твердого тела. Первые два из уравнений движения определяют то движение, которое фигура совершала бы при Основными кинематическими характеристиками рассматриваемого движения являются скорость и ускорение поступательного движения, равные скорости и ускорению полюса Рис.30 Рис.31 Рис.32
Один из таких методов дает теорема: проекции скоростей двух точек твердого тела на ось, проходящую через эти точки, равны друг другу. Рассмотрим какие-нибудь две точки А и В плоской фигуры (или тела). Принимая точку А за полюс (рис.32), получаем
и теорема доказана. Рис.33 Если теперь в момент времени
так как
Из равенств, следует еще, что
т.е. что скорости точек плоской фигуры пропорциональны их расстояниям от МЦС. Полученные результаты приводят к следующим выводам. 1. Для определения мгновенного центра скоростей надо знать только направления скоростей 2. Для определения скорости любой точки плоской фигуры, надо знать модуль и направление скорости какой-нибудь одной точки А фигуры и направление скорости другой ее точки В. Тогда, восставив из точек А и В перпендикуляры к 3. Угловая скорость
12. Частные случаи определения мгновенного центра скоростей. Рассмотрим некоторые частные случаи определения мгновенного центра скоростей. а) Если плоскопараллельное движение осуществляется путем качения без скольжения одного цилиндрического тела по поверхности другого неподвижного, то точка Р катящегося тела, касающаяся неподвижной поверхности (рис.34), имеет в данный момент времени вследствие отсутствия скольжения скорость, равную нулю ( б) Если скорости точек А и В плоской фигуры параллельны друг другу, причем линия АВ не перпендикулярна
Рис.34 Рис.35 в) Если скорости точек А и В плоской фигуры параллельны друг другу и при этом линия АВ перпендикулярна г) Если известны вектор скорости Рис.41 Рис.42
Наконец, когда точка М движется криволинейно и ее траектория известна, то Рис.48 Рассмотрим точку М, движущуюся по отношению к подвижно системе отсчета Oxyz, которая в свою очередь как-то движется относительно другой системы отсчета 1. Движение, совершаемое точкой М по отношению к подвижной системе отсчета (к осям Oxyz), называется относительным движением (такое движение будет видеть наблюдатель, связанный с этими осями и перемещающийся вместе с ними). Траектория АВ, описываемая точкой в относительном движении, называется относительной траекторией. Скорость точки М по отношению к осям Oxyz называется относительной скоростью (обозначается 2. Движение, совершаемое подвижной системой отсчета Oxyz (и всеми неизменно связанными с нею точками пространства) по отношению к неподвижной системе Скорость той неизменно связанной с подвижными осями Oxyz точки m, с которой в данный момент времени совпадает движущаяся точка М, называется переносной скоростью точки М в этот момент (обозначается
Если представить себе, что относительное движение точки происходит по поверхности (или внутри) твердого тела, с которым жестко связаны подвижные оси Oxyz, то переносной скоростью (или ускорением) точки М в данный момент времени будет скорость (или ускорение) той точки т тела, с которой в этот момент совпадает точка М. 3. Движение, совершаемое точкой по отношению к неподвижной системе отсчета В приведенном выше примере движение шара относительно палубы парохода будет относительным, а скорость - относительной скоростью шара; движение парохода по отношению к берегу будет для шара переносным движением, а скорость той точки палубы, которой в данный момент времени касается шар будет в этот момент его переносной скоростью; наконец, движение шара по отношению к берегу будет его абсолютным движением, а скорость - абсолютной скоростью шара. При исследовании сложного движения точки полезно применять «Правило остановки». Для того, чтобы неподвижный наблюдатель увидел относительное движение точки, надо остановить переносное движение. Тогда будет происходить только относительное движение. Относительное движение станет абсолютным. И наоборот, если остановить относительное движение, переносное станет абсолютным и неподвижный наблюдатель увидит только это переносное движение. В последнем случае, при определении переносного движения точки, обнаруживается одно очень важное обстоятельство. Переносное движение точки зависит от того в какой момент будет остановлено относительное движение, от того, где точка находится на среде в этот момент. Так как, вообще говоря, все точки среды движутся по-разному. Поэтому логичнее определять переносное движение точки как абсолютное движение той точки среды, с которой совпадает в данный момент движущаяся точка.
Рис.49
Произвольное переносное движение подвижной системы отсчета слагается из поступательного движения со скоростью Положение точки М по отношению к подвижной системе отсчета можно определить радиусом-вектором
где координаты x, y, z точки М изменяются с течением времени вследствие движения точки М относительно подвижной системы отсчета. Если радиус-вектор Положение точки М относительно неподвижной системы отсчета
Если относительные координаты x , y , z точки М и векторы Скорость составного движения точки М, или абсолютная скорость этой точки, равна, очевидно, производной от радиуса-вектора
Поэтому, дифференцируя равенство (1) по времени t, получим
Разобьем слагаемые в правой части этого равенства на две группы по следующему признаку. К первой группе отнесем те слагаемые, которые содержат производные только от относительных координат x , y , z , а ко второй - те слагаемые, которые содержат производные от векторов
Каждая из групп слагаемых, обозначенных через Скорость Скорость Итак, Это равенство выражает теорему сложения скоростей в случае, когда переносное движение является произвольным: абсолютная скорость точки М равна геометрической сумме переносной и относительной скоростей этой точки. Пример 13. Колечко М движется по вращающемуся стержню так, что
Рис.50
Ранее было установлено, что траектория относительного движения – прямая линия, совпадающая со стержнем, и движение это определяется уравнением Поэтому относительная скорость Абсолютная скорость колечка
Рис.51 Если переносное движение подвижной системы отсчета есть поступательное движение, то Кроме того, поворотное ускорение точки может, очевидно, обращаться в нуль, если: а) вектор относительной скорости б) точка не имеет движения относительно подвижной системы отсчета или относительная скорость Рис.9
Прямая DE, вдоль которой направлена сила, называется линией действия силы. В тексте вектор силы обозначается латинскими буквами
2. Совокупность сил, действующих на какое-нибудь твердое тело, будем называть системой сил. 3. Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным. 4. Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными. 5. Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешенной или эквивалентной нулю. 6. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил. Таким образом, равнодействующая - это сила, которая одна заменяет действие данной системы сил на твердое тело. 7. Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой. 8. Силы, действующие на твердое тело, можно разделить на внешние и внутренние. Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел. Внутренними называются силы, с которыми частицы данного тела действуют друг на друга. 9. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной. Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными. Понятие о сосредоточенной силе является условным, так как практически приложить силу к телу в одной точке нельзя. Силы, которые мы в механике рассматриваем как сосредоточенные, представляют собою по существу равнодействующие некоторых систем распределенных сил. В частности, обычно рассматриваемая в механике сила тяжести, действующая на данное твердое тело, представляет собою равнодействующую сил тяжести его частиц. Линия действия этой равнодействующей проходит через точку, называемую центром тяжести тела. Аксиомы статики. Все теоремы и уравнения статики выводятся из нескольких исходных положений, принимаемых без математических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике. Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1 = F2) и направлены вдоль одной прямой в противоположные стороны (рис. 10).
Рис.10
Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может. Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Эта аксиома устанавливает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу. Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела.
Рис.11
В самом деле, пусть на твердое тело действует приложенная в точке А сила Таким образом, вектор, изображающий силу Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах. Вектор
Рис.12 Величина равнодействующей

Конечно, Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке. Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие. Закон о равенстве действия и противодействия является одним из основных законов механики. Из него следует, что если тело А действует на тело В с силой
Рис.13 Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым). Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сваренными друг с другом и т. д.
Рис.14 Рис.15
Рис.16
2. Нить. Связь, осуществленная в виде гибкой нерастяжимой нити (рис.15), не дает телу М удаляться от точки подвеса нити по направлению AM. Поэтому реакция Т натянутой нити направлена вдоль нити от тела к точке ее подвеса. Если даже заранее можно догадаться, что реакция направлена к телу, все равно ее надо направить от тела. Таково правило. Оно избавляет от лишних и ненужных предположений и, как убедимся далее, помогает установить сжат стержень или растянут. 3. Цилиндрический шарнир (подшипник). Если два тела соединены болтом, проходящим через отверстия в этих телах, то такое соединение называется шарнирным или просто шарниром; осевая линия болта называется осью шарнира. Тело АВ, прикрепленное шарниром к опоре D (рис.16,а), может поворачиваться как угодно вокруг оси шарнира (в плоскости чертежа); при этом конец А тела не может переместиться ни по какому направлению, перпендикулярному к оси шарнира. Поэтому реакция R цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной к оси шарнира, т.е. в плоскости Аху. Для силы R в этом случае наперед не известны ни ее модуль R, ни направление (угол 4. Шаровой шарнир и подпятник. Этот вид связи закрепляет какую-нибудь точку тела так, что она не может совершать никаких перемещений в пространстве. Примерами таких связей служат шаровая пята, с помощью которой прикрепляется фотоаппарат к штативу (рис.16,б) и подшипник с упором (подпятник) (рис. 16,в). Реакция R шарового шарнира или подпятника может иметь любое направление в пространстве. Для нее наперед неизвестны ни модуль реакции R, ни углы, образуемые ею с осями х, у, z.
Рис.17 5. Стержень. Пусть в какой-нибудь конструкции связью является стержень АВ, закрепленный на концах шарнирами (рис.17). Примем, что весом стержня по сравнению с воспринимаемой им нагрузкой можно пренебречь. Тогда на стержень будут действовать только две силы приложенные в шарнирах А и В. Но если стержень АВ находится в равновесии, то по аксиоме 1 приложенные в точках А и В силы должны быть направлены вдоль одной прямой, т. е. вдоль оси стержня. Следовательно, нагруженный на концах стержень, весом которого по сравнению с этими нагрузками можно пренебречь, работает только на растяжение или на сжатие. Если такой стержень является связью, то реакция 6. Подвижная шарнирная опора (рис.18, опора А) препятствует движению тела только в направлении перпендикулярном плоскости скольжения опоры. Реакция 7. Неподвижная шарнирная опора (рис.18, опора В). Реакция
Рис.18
Способ закрепления, показанный на рис.18, употребляется для того, чтобы в балке АВ не возникало дополнительных напряжений при изменении ее длины от изменения температуры или от изгиба. Заметим, что если опору А балки (рис.18) сделать тоже неподвижной, то балка при действии на нее любой плоской системы сил будет статически неопределимой, так как тогда в три уравнения равновесия войдут четыре неизвестные реакции 8. Неподвижная защемляющая опора или жесткая заделка (рис.19). В этом случае на заделанный конец балки со стороны опорных плоскостей действует система распределенных сил реакций. Считая эти силы приведенными к центру А, мы можем их заменить одной наперед неизвестной силой
Рис.19 При определении реакций связи других конструкций надо установить, разрешает ли она двигаться вдоль трех взаимно перпендикулярных осей и вращаться вокруг этих осей. Если препятствует какому-либо движению – показать соответствующую силу, если препятствует вращению – пару с соответствующим моментом. Иногда приходится исследовать равновесие нетвердых тел. При этом будем пользоваться предположением, что если это нетвердое тело находится в равновесии под действием сил, то его можно рассматривать как твердое тело, используя все правила и методы статики. Рис. 12
Обозначать проекцию силы
Но из чертежа видно, что Следовательно,
т. е. проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направлением оси. При этом проекция будет положительной, если угол между направлением силы и положительным направлением оси - острый, и отрицательной, если этот угол - тупой; если сила перпендикулярна к оси, то ее проекция на ось равна нулю.
Рис.13 Проекцией силы В некоторых случаях для нахождения проекции силы на ось бывает удобнее найти сначала ее проекцию на плоскость, в которой эта ось лежит, а затем найденную проекцию на плоскость спроектировать на данную ось. Например, в случае, изображенном на рис. 13, найдем таким способом, что
Рис.14 Фигура, построенная на рис. 14,б, называется силовым (в общем случае векторным) многоугольником. Таким образом, геометрическая сумма или главный вектор нескольких сил изображается замыкающей стороной силового многоугольника, построенного из этих сил (правило силового многоугольника). При построении векторного многоугольника следует помнить, что у всех слагаемых векторов стрелки должны быть направлены в одну сторону (по обводу многоугольника), а у вектора Равнодействующая сходящихся сил. При изучении статики мы будем последовательно переходить от рассмотрения более простых систем сил к более сложным. Начнем с рассмотрения системы сходящихся сил. Сходящимися называются силы, линии действия которых пересекаются в одной точке (см. рис. 14, а). По следствию из первых двух аксиом статики система сходящихся сил, действующих на абсолютно твердое тело, эквивалентна системе сил, приложенных в одной точке (на рис. 14, а в точке А). Последовательно применяя аксиому параллелограмма сил, приходим к выводу, что система сходящихся сил имеет равнодействующую, равную геометрической сумме (главному вектору) этих сил и приложенную в точке их пересечения. Следовательно, если силы
Рис.15
 на ось х нужно использовать правило двойного проектирования. на ось х нужно использовать правило двойного проектирования.
Проектируем силу сначала на плоскость хОу, в которой расположена ось (рис.15), получим вектор Аналогично действуя, найдём проекцию на ось у: Проекция на ось z находится проще: Нетрудно убедиться, что проекции сил на ось V равны:
При определении этих проекций удобно воспользоваться рис.16, видом сверху на расположение сил и осей.
Рис.16
Вернёмся к системе сходящихся сил (рис. 17). Проведём оси координат с началом в точке пересечения линий действия сил, в точке О. Мы уже знаем, что равнодействующая сил
Они равны алгебраическим суммам проекций сил на соответствующие оси. А зная проекции равнодействующей, можно определить и величину её как диагональ прямоугольного параллелепипеда
Направление вектора
Рис.17
Пример 2. На шар, вес которого Р, лежащий на горизонтальной плоскости и привязанный к ней нитью АВ, действует сила F (рис.18). Определим реакции связей.
Рис.18
Следует сразу заметить, что все задачи статики решаются по одной схеме, в определённом порядке. Продемонстрируем ее на примере решения этой задачи. 1. Надо выбрать (назначить) объект равновесия – тело, равновесие которого следует рассмотреть, чтобы найти неизвестные. В этой задаче, конечно, объект равновесия – шар. 2. Построение расчётной схемы. Расчётная схема – это объект равновесия, изображённый отдельно, свободным телом, без связей, со всеми силами, действующими на него: реакциями и остальными силами. Показываем реакцию нити 3. Надо установить какая получилась система сил и составить соответствующие уравнения равновесия. Здесь получилась система сходящихся сил, расположенных в плоскости, для которой составляем два уравнения (оси можно проводить произвольно):
4. Решаем систему уравнений и находим неизвестные.
По условию задачи требовалось найти давление шара на плоскость. А мы нашли реакцию плоскости на шар. Но, по определению следует, что эти силы равны по величине, только давление на плоскость будет направлено в противоположную сторону, вниз.
Рис.20
Ограничимся пока рассмотрением систем сил, лежащих в одной плоскости. В этом случае плоскость поворота для всех сил является общей и в дополнительном задании не нуждается. Тогда для количественного измерения вращательного эффекта можно ввести следующее понятие о моменте силы: моментом силы Момент силы
В дальнейшем условимся считать, что момент имеет знак плюс, если сила стремится повернуть тело вокруг центра О против хода часовой стрелки, и знак минус, - если по ходу часовой стрелки. Так, для силы Отметим следующие свойства момента силы: 1) Момент силы не изменяется при переносе точки приложения силы вдоль ее линии действия. 2) Момент силы относительно центра О равен нулю только тогда, когда сила равна нулю или когда линия действия силы проходит через центр О (плечо равно нулю). 3) Момент силы численно выражается удвоенной площадью треугольника ОАВ (рис. 20,б)
Этот результат следует из того, что
Рис.21
Рассмотрим систему сил Для доказательства теоремы найдем соответствующие выражения моментов m0(
Аналогично вычисляются моменты всех других сил. Обозначим равнодействующую сил
или,
Пара сил. Момент пары сил. Парой сил (или просто парой) называются две силы, равные по величине, параллельные и направленные в противоположные стороны (рис.22). Очевидно,
Рис.22
Несмотря на то, что сумма сил равна нулю, эти силы не уравновешиваются. Под действием этих сил, пары сил, тело начнёт вращаться. И вращательный эффект будет определяться моментом пары:
Расстояние a между линиями действия сил называется плечом пары. Если пара вращает тело против часовой стрелки, момент её считается положительным (как на рис.22), если по часовой стрелке – отрицательным. Для того, чтобы момент пары указывал и плоскость, в которой происходит вращение, его представляют вектором. Вектор момента пары Нетрудно доказать, что вектор момента пары
О точке приложения вектора
Рис.23 Свойства пар 1) Проекция пары на любую ось равна нулю. Это следует из определения пары сил. 2) Найдём сумму моментов сил
Рис.24
Покажем радиусы-векторы точек А1 и А2 и вектор
Но Но Значит Момент пары сил относительно любой точки равен моменту этой пары. Отсюда следует, что, во-первых, где бы не находилась точка О и, во-вторых, где бы не располагалась эта пара в теле и как бы она не была повёрнута в своей плоскости, действие её на тело будет одинаково. Так как момент сил, составляющих пару, в этих случаях один и тот же, равный моменту этой пары Поэтому можно сформулировать ещё два свойства. 3) Пару можно перемещать в пределах тела по плоскости действия и переносить в любую другую параллельную плоскость. 4) Так как действие на тело сил, составляющих пару, определяется лишь её моментом, произведением одной из сил на плечо, то у пары можно изменять силы и плечо, но так, чтобы момент пары остался прежним. Например, при силах F1= F2=5 H и плече а = 4 см момент пары m = 20 H×см. Можно силы сделать равными 2 Н, а плечо а = 10 см. При этом момент останется прежним 20 Нсм и действие пары на тело не изменится. Все эти свойства можно объединить и, как следствие, сделать вывод, что пары с одинаковым вектором момента Исходя из этого, на расчётных схемах пару изображают в виде дуги со стрелкой, указывающей направление вращения, и рядом пишут величину момента m. Или, если это пространственная конструкция, показывают только вектор момента этой пары. И вектор момента пары можно прикладывать к любой точке тела. Значит вектор момента пары И ещё одно дополнительное замечание. Так как момент пары равен вектору момента одной из сил её относительно точки приложения второй силы, то момент пары сил относительно какой-либо оси z – есть проекция вектора момента пары
где Рис.25
 и и  . Так как . Так как  , то эти силы , то эти силы  и и  будут образовывать пару, момент которой будут образовывать пару, момент которой  , где , где  – радиус-вектор точки В, совпадающий с АВ. – радиус-вектор точки В, совпадающий с АВ.
Так как
Следовательно, в результате сложения пар, расположенных в пересекающихся плоскостях, получится пара сил. Момент её будет равен векторной сумме моментов слагаемых пар. При сложении нескольких пар, действующих в произвольных плоскостях, получим пару с моментом
Конечно, эта результирующая пара будет располагаться в плоскости перпендикулярной вектору Равенство нулю результирующей пары будет означать, что пары, действующие на тело, уравновешиваются. Следовательно, условие равновесия пар
Если пары расположены в одной плоскости, векторы моментов их будут параллельны. И момент результирующей пары можно определить как алгебраическую сумму моментов пар.
Рис.26
Например, пары, показанные на рис.26, расположены в одной плоскости и моменты их: m1=2 Hсм , m2=5 Hсм, m3=3 Hсм. Пары уравновешиваются, потому что алгебраическая сумма их моментов равна нулю:
Рис.27
Приложим к этой точке две уравновешивающиеся силы В результате получим силу Этот процесс замены силы Точка О называется точкой приведения; сила Основная теорема статики. Для произвольной системы сил Главным вектором системы сил называют величину, равную сумме всех сил системы, Главным моментом системы сил относительно некоторого центра О называют величину, равную сумме моментов всех сил системы относительно центра, Основная теорема статики (теорема Пуансо). Произвольная пространственная система сил эквивалентна силе, равной главному вектору системы и приложенной в некоторой точке (центре приведения), и паре сил, момент которой равен главному моменту системы относительно выбранного центра приведения. Доказательство
В результате получим: – систему сходящихся сил где – систему пар сил, моменты которых где Систему сходящихся сил заменим ее равнодействующей равной главному вектору исходной системы, а систему пар сил – одной парой, момент которой равен главному моменту исходной системы относительно центра O. Теорема доказана. Следствие.Две системы сил эквивалентны тогда и только тогда, когда они имеют одинаковые главные векторы и одинаковые главные моменты относительно одного и того же центра.
Итак, простейшая система сил, к которой в общем случае приводится произвольная система, состоит из одной силы и одной пары сил. Выясним влияние центра приведения на простейшую систему.Выберем новый центр приведения Определим главный момент системы относительно нового центра где Таким образом, т.е. при изменении центра приведения главный момент изменяется на величину момента силы, равной главному вектору и приложенной в первоначальном центре приведения, относительно нового центра приведения. Предположим, что для некоторого центра O: Теорема Вариньона Теорема. Если система сил имеет равнодействующую, то ее момент относительно произвольной точки равен сумме моментов всех сил системы относительной этой же точки. Доказательство
Но и поэтому из выражения (3.7) получим откуда следует что и нужно было доказать. Теорема Вариньона справедлива и для моментов сил относительно координатных осей. Действительно, спроецируем векторное равенство (3.8) на оси системы Oxyz и получим Равновесие системы тел. Система твердых тел состоит из нескольких тел, соединённых друг с другом шарнирами или соприкасающихся между собой. При решении задач на равновесие системы тел недостаточно рассматривать равновесие всей системы в целом, так как число неизвестных может быть больше числа уравнений. Для решения задачи необходимо будет дополнительно рассмотреть равновесие какой-нибудь одной или нескольких частей конструкции. Другой способ решения подобных задач состоит в том, что конструкцию сразу расчленяют на отдельные тела и составляют уравнения равновесия каждого из тел, рассматривая его как свободное. При этом реакции внутренних связей будут попарно равны по модулю и противоположны по направлению. Для записи условия равновесия системы, состоящей из твёрдых тел, систему разделяют на отдельные части, и записывают уравнения равновесия как для всей системы, так и для её частей[1]. При этом возможны несколько эквивалентных вариантов записи условий равновесия в зависимости от выбора частей системы, для которых записываются уравнения. Виды равновесия Выделяют три вида равновесия:
Рис.43 Рассмотрим теперь твердое тело, на которое действует какая угодно система сил приложенных в центре О, и система пар, моменты которых будут равны
Силы, приложенные в точке О, заменяются одной силой
Чтобы сложить все полученные пары, надо геометрически сложить векторы моментов этих пар. В результате система пар заменится одной парой, момент которой
Как и в случае плоской системы, величина
Рис.44
Таким образом мы доказали следующую теорему, любая система сил, действующих на абсолютно твердое тело, при приведении к произвольно взятому центру О заменяется одной силой Векторы Выражения для Rx, Ry, Rz нам известны. Проекции вектора Окончательно для определения проекций главного вектора
Рис.36
При определении центра тяжести полезны несколько теорем. 1) Если однородное тело имеет плоскость симметрии, то центр тяжести его находится в этой плоскости. Если оси х и у расположить в этой плоскости симметрии (рис.36), то для каждой точки с координатами
2) Если однородное тело имеет ось симметрии, то центр тяжести тела находится на этой оси. Действительно, в этом случае, если ось z провести по оси симметрии, для каждой точки с координатами
Аналогично доказывается и третья теорема. 3) Если однородное тело имеет центр симметрии, то центр тяжести тела находится в этой точке.
И ещё несколько замечаний. Первое. Если тело можно разделить на части, у которых известны вес и положение центра тяжести, то незачем рассматривать каждую точку, а в формулах (2) Второе. Если тело однородное, то вес отдельной части его
И аналогично, Третье замечание. Если тело состоит из однородных пластин одинаковой, малой толщины, то объём каждой пластины
где Четвёртое замечание. Если тело состоит из стержней, прямых или криволинейных, однородных и постоянного сечения, то вес их
где Отметим, что согласно определению центр тяжести - это точка геометрическая; она может лежать и вне пределов данного тела (например, для кольца).
где
Если твердое тело представляет собой неоднородную линию, то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
где
42. Способы определения центра тяжести. Способы определения координат центра тяжести. Исходя из полученных выше общих формул, можно указать конкретные способы определения координат центров тяжести тел.
1. Симметрия. Если однородное тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии. 2. Разбиение. Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести и площадь известны.
3. Дополнение. Частный случай способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны.
Рис.26
Наибольший угол
Так как
При равновесии полная реакция R, в зависимости от сдвигающих сил, может проходить где угодно внутри угла трения. Когда равновесие становится предельным, реакция будет отклонена от нормали на угол Конусом трения называют конус, описанный предельной силой реакции шероховатой связи Если к телу, лежащему на шероховатой поверхности, приложить силу Р, образующую угол
Рис.27
Для равновесия твёрдого тела на шероховатой поверхности необходимо и достаточно, чтобы линия действия равнодействующей активных сил, действующих на твёрдое тело, проходила внутри конуса трения или по его образующей через его вершину. Тело нельзя вывести из равновесия любой по модулю активной силой, если её линия действия проходит внутри конуса трения.
Рис.1 При движении точки М вектор
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор Геометрическое место концов вектора 2. Координатный способ задания движения точки. Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.1), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т. е. знать зависимости
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения. Чтобы получить уравнение траектории надо из уравнений движения исключить параметр Нетрудно установить зависимость между векторным и координатным способами задания движения. Разложим вектор
где Так как начало
Пример 1. Движение точки задано уравнениями
Чтобы исключить время, параметр t, найдём из первого уравнения Начальное положение точки M0 (при t=0) определяется координатами Рис.2 Через 1 сек. точка будет в положении M1 с координатами
Примечание. Движение точки может быть задано с помощью и других координат. Например, цилиндрических или сферических. Среди них будут не только линейные размеры, но и углы. При необходимости, с заданием движения цилиндрическими и сферическими координатами можно познакомиться по учебникам. 3. Естественный способ задания движения точки.
Рис.3
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.3) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси). Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О' до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M1, М2,... . следовательно, расстояние s будет с течением времени изменяться. 3. Определение скорости и ускорения точки при векторном способе задания движения. Вектор скорости точки Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки. Известно, что при движении точки по прямой линии с постоянной скоростью, равномерно, скорость её определяется делением пройденного расстояния s на время:
Рис. 5
в момент времени t в положении М, определяемом радиусом-вектором Отношение вектора перемещения точки к соответствующему промежутку времени дает векторную величину, называемую средней по модулю и направлению скоростью точки за промежуток времени
Скоростью точки в данный момент времени
Итак, вектор скорости точки в данный момент времени равен первой производной от радиуса-вектора точки по времени. Так как предельным направлением секущей ММ1 является касательная, то вектор скорости точки в данный момент времени направлен по касательной к траектории точки в сторону движения. Вектор ускорения точки Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Пусть в некоторый момент времени
Рис.6
Тогда за промежуток времени Отношение приращения вектора скорости
Вектор среднего ускорения имеет то же направление, что и вектор Ускорением точки в данный момент времени t называется векторная величина Найдем, как располагается вектор
4. Определение скорости и ускорения точки при координатном способе задания движения. Вектор скорости точки
Таким образом, проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени. Зная проекции скорости, найдем ее модуль и направление (т.е. углы
Итак, численная величина скорости точки в данный момент времени равна первой производной от расстояния (криволинейной координаты) s точки по времени. Направлен вектор скорости по касательной к траектории, которая нам наперед известна. Определение ускорения при координатном способе задания движения Вектор ускорения точки
или
т.е. проекция ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул
где Пример 3. Движение точки задано уравнениями Из первого уравнения Это уравнение параболы. В начале движения, при А, например, при t =0,5 c она будет в положении M с координатами Проекции скорости на оси При И модуль скорости Составляющие скорости по осям и вектор её показаны в масштабе на рис. 7.
Рис.7 Проекции ускорения
5. Определение скорости и ускорения точки при естественном способе задания движения. Величину скорости можно определить как предел (
где Следовательно, скорость точки есть первая производная по времени от закона движения:
Направлен вектор скорости, как было установлено ранее, по касательной к траектории. Если величина скорости в данный момент будет больше нуля, то вектор скорости направляется в положительном направлении Определение ускорения при естественном способе задания движения. Касательное и нормальное ускорение точки При естественном способе задания движения вектор
Рис.8
Было показано, что ускорение точки Вычислим проекции Тогда по определению
Перейдем в этом равенстве от векторов к их проекциям на оси
Учитывая, что проекция вектора на параллельные оси одинаковы, проведем через точку М1 оси Напомним, что предел отношения угла смежности
Обращаясь теперь к чертежу (рис.9), находим, что проекции векторов
где Следовательно,
Заметим что при
Тогда, учитывая, что в пределе
Правую часть выражения
так как пределы каждого из стоящих в скобке сомножителей при
Окончательно получаем:
Итак, мы доказали, что проекция ускорения точки на касательную равна первой производной от численной величины скорости или второй производной от расстояния (криволинейной координаты) s no времени, а проекция ускорения на главную нормаль равна квадрату скорости деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю (
Рис.9
Отложим вдоль касательной Вектор ускорения точки
Поступательное движение твердого тела. Закон движения. В кинематике, как и в статистике, будем рассматривать все твердые тела как абсолютно твердые. Абсолютно твердым телом называется материальное тело, геометрическая форма которого и размеры не изменяются ни при каких механических воздействиях со стороны других тел, а расстояние между любыми двумя его точками остается постоянным. Кинематика твердого тела, также как и динамика твердого тела, является одним из наиболее трудных разделов курса теоретической механики. Задачи кинематики твердого тела распадаются на две части: 1) задание движения и определение кинематических характеристик движения тела в целом; 2) определение кинематических характеристик движения отдельных точек тела. Существует пять видов движения твердого тела: 1) поступательное движение; 2) вращение вокруг неподвижной оси; 3) плоское движение; 4) вращение вокруг неподвижной точки; 5) свободное движение. Первые два называются простейшими движениями твердого тела/ Начнем с рассмотрения поступательного движения твердого тела. Поступательным называется такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельной своему начальному направлению. Поступательное движение не следует смешивать с прямолинейным. При поступательном движении тела траектории его точек могут быть любыми кривыми линиями. Приведем примеры. 1. Кузов автомобиля на прямом горизонтальном участке дороги движется поступательно. При этом траектории его точек будут прямыми линиями. 2. Спарник АВ (рис.11) при вращении кривошипов Рис.11 Рис.12
Поступательно движутся педали велосипеда относительно его рамы во время движения, поршни в цилиндрах двигателя внутреннего сгорания относительно цилиндров, кабины колеса обозрения в парках относительно Земли.
Свойства поступательного движения определяются следующей теоремой: при поступательном движении все точки тела описывают одинаковые (при наложении совпадающие) траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения. Для доказательства рассмотрим твердое тело, совершающее поступательное движение относительно системы отсчета Oxyz. Возьмем в теле две произвольные точки А и В, положения которых в момент времени t определяются радиусами-векторами Проведем вектор Тогда При этом длина АВ постоянна, как расстояние между точками твердого тела, а направление АВ остается неизменным, так как тело движется поступательно. Таким образом, вектор АВ во все время движения тела остается постоянным ( Для нахождения скоростей точек А и В продифференцируем обе части равенства по времени. Получим
Но производная от постоянного вектора АВ равна нулю. Производные же от векторов
т.е. что скорости точек А и В тела в любой момент времени одинаковы и по модулю, и по направлению. Беря от обеих частей полученного равенства производные по времени:
Следовательно, ускорения точек А и В тела в любой момент времени тоже одинаковы по модулю и направлению. Так как точки А и В были выбраны произвольно, то из найденных результатов следует, что у всех точек тела их траектории, а также скорости и ускорения в любой момент времени будут одинаковы. Таким образом, теорема доказана. Из теоремы следует, что поступательное движение твердого тела определяется движением какой-нибудь одной из его точки. Следовательно, изучение поступательного движения тела сводится к задаче кинематике точки, нами уже рассмотренной. При поступательном движении общую для всех точек тела скорость Заметим, что понятие о скорости и ускорении тела имеют смысл только при поступательном движении. Во всех остальных случаях точки тела, как мы увидим, движутся с разными скоростями и ускорениями, и термины <<скорость тела>> или <<ускорение тела>> для этих движений теряют смысл. Закон движения — математическая формулировка того, как движется тело или как происходит движение более общего вида или набор зависимостей, которые выявляют все данные о движении точки. В классической механике материальной точки закон движения представляет собой три зависимости трёх пространственных координат от времени, либо зависимость одной векторной величины (радиус-вектора) от времени, вида
Закон движения может быть найден, в зависимости от задачи, либо из дифференциальных законов механики (см. Законы Ньютона), либо из интегральных (см. Закон сохранения энергии, Закон сохранения импульса), либо из так называемых вариационных принципов. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 482; Нарушение авторского права страницы
 будет с течением времени изменяться и по модулю, и по направлению. Следовательно,
будет с течением времени изменяться и по модулю, и по направлению. Следовательно,  :
: .
. ,
,  ,
,  .
. .
. на составляющие по осям координат:
на составляющие по осям координат:
 - проекции вектора на оси;
- проекции вектора на оси;  – единичные векторы направленные по осям, орты осей.
– единичные векторы направленные по осям, орты осей.


 из второго
из второго  Затем возведём в квадрат и сложим. Так как
Затем возведём в квадрат и сложим. Так как  получим
получим  Это уравнение эллипса с полуосями 2 см и 3 см (рис.2).
Это уравнение эллипса с полуосями 2 см и 3 см (рис.2).


 . При неравномерном движении эта формула не годится. Введем сначала понятие о средней скорости точки за какой-нибудь промежуток времени. Пусть движущаяся точка находится
. При неравномерном движении эта формула не годится. Введем сначала понятие о средней скорости точки за какой-нибудь промежуток времени. Пусть движущаяся точка находится
 , а в момент
, а в момент  приходит в положение M1 определяемое вектором
приходит в положение M1 определяемое вектором  (рис.5). Тогда перемещение точки за промежуток времени
(рис.5). Тогда перемещение точки за промежуток времени  определяется вектором
определяется вектором  который будем называть вектором перемещения точки. Из треугольника ОММ1 видно, что
который будем называть вектором перемещения точки. Из треугольника ОММ1 видно, что  ; следовательно,
; следовательно,  .
. :
: .
. называется векторная величина
называется векторная величина  , к которой стремится средняя скорость
, к которой стремится средняя скорость  при стремлении промежутка времени
при стремлении промежутка времени  к нулю:
к нулю: ,
,  .
. движущаяся точка находится в положении М и имеет скорость
движущаяся точка находится в положении М и имеет скорость  , а в момент
, а в момент  приходит в положение
приходит в положение  и имеет скорость
и имеет скорость  (рис. 6).
(рис. 6).
 скорость точки получает приращение
скорость точки получает приращение  . Для построения вектора
. Для построения вектора  отложим от точки М вектор, равный
отложим от точки М вектор, равный  , и построим параллелограмм, в котором диагональю будет
, и построим параллелограмм, в котором диагональю будет  , a одной из сторон
, a одной из сторон  . Тогда, очевидно, вторая сторона и будет изображать вектор
. Тогда, очевидно, вторая сторона и будет изображать вектор  . Заметим, что вектор
. Заметим, что вектор  определяет вектор среднего ускорения точки за этот промежуток времени:
определяет вектор среднего ускорения точки за этот промежуток времени: .
. , к которой стремится среднее ускорение
, к которой стремится среднее ускорение  при стремлении промежутка времени
при стремлении промежутка времени  к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени. по отношению к траектории точки. При прямолинейном движении вектор
по отношению к траектории точки. При прямолинейном движении вектор  направлен вдоль прямой, по которой движется точка. Если траекторией точки является плоская кривая, то вектор ускорения
направлен вдоль прямой, по которой движется точка. Если траекторией точки является плоская кривая, то вектор ускорения  , так же как и вектор
, так же как и вектор  , лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор
, лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор  направлен в сторону вогнутости траектории и лежит в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке M1 (рис. 4). В пределе, когда точка М стремится к М, эта плоскость занимает положение так называемой соприкасающейся плоскости, т.е. плоскости, в которой происходит бесконечно малый поворот касательной к траектории при элементарном перемещении движущейся точки. Следовательно, в общем случае вектор ускорения
направлен в сторону вогнутости траектории и лежит в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке M1 (рис. 4). В пределе, когда точка М стремится к М, эта плоскость занимает положение так называемой соприкасающейся плоскости, т.е. плоскости, в которой происходит бесконечно малый поворот касательной к траектории при элементарном перемещении движущейся точки. Следовательно, в общем случае вектор ускорения  лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой.
лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой. , учитывая, что
, учитывая, что  ,
,  ,
,  , найдем:
, найдем: ,
,  ,
,  .
. ,
,  ,
,  , которые вектор
, которые вектор  образует с координатными осями) по формулам
образует с координатными осями) по формулам ;
; ,
,  ,
,  .
. в проекции на оси получаем:
в проекции на оси получаем: ,
,  ,
, 
 ,
,  ,
,  ,
, ;
; ,
,  ,
,  ,
, ,
,  ,
,  - углы, образуемые вектором ускорения с координатными осями.
- углы, образуемые вектором ускорения с координатными осями. .
. . Подставив во второе, получим уравнение траектории:
. Подставив во второе, получим уравнение траектории: 
 , точка находилась на самом верху, в положении M0 (
, точка находилась на самом верху, в положении M0 (  ).
).








 . Так как проекция вектора ускорения на ось x равна нулю, а на ось y – отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени.
. Так как проекция вектора ускорения на ось x равна нулю, а на ось y – отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени. – длина хорды
– длина хорды  ):
):
 – длина дуги
– длина дуги  . Первый предел равен единице, второй предел – производная
. Первый предел равен единице, второй предел – производная 

 определяют по его проекциям на оси
определяют по его проекциям на оси  , имеющие начало в точке М и движущиеся вместе с нею (рис.8). Эти оси, называемые осями естественного трехгранника (или скоростными (естественными) осями), направлены следующим образом: ось
, имеющие начало в точке М и движущиеся вместе с нею (рис.8). Эти оси, называемые осями естественного трехгранника (или скоростными (естественными) осями), направлены следующим образом: ось  - вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось
- вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось  - по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось
- по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось  - перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль
- перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль  , лежащая в соприкасающейся плоскости (в плоскости самой кривой, если кривая плоская), называется главной нормалью, а перпендикулярная к ней нормаль
, лежащая в соприкасающейся плоскости (в плоскости самой кривой, если кривая плоская), называется главной нормалью, а перпендикулярная к ней нормаль 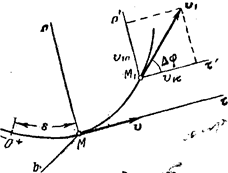
 лежит в соприкасающейся плоскости, т.е. в плоскости
лежит в соприкасающейся плоскости, т.е. в плоскости  ; следовательно, проекция вектора
; следовательно, проекция вектора  на бинормаль равна нулю (
на бинормаль равна нулю (  ).
). , на две другие оси. Пусть в момент времени t точка находится в положении М и имеет скорость
, на две другие оси. Пусть в момент времени t точка находится в положении М и имеет скорость  , a в момент
, a в момент  приходит в положение М1 и имеет скорость
приходит в положение М1 и имеет скорость  .
. .
. и
и  , проведенные в точке М (рис.8). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
, проведенные в точке М (рис.8). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим: ,
,  .
. параллельные
параллельные  и обозначим угол между направлением вектора
и обозначим угол между направлением вектора  и касательной
и касательной  через
через  . Этот угол между касательными к кривой в точках М и М1 называется углом смежности.
. Этот угол между касательными к кривой в точках М и М1 называется углом смежности. к длине дуги
к длине дуги  определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны
определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны  в точке М. Таким образом,
в точке М. Таким образом, .
. и
и  на оси
на оси  будут равны:
будут равны: ,
, и
и  - численные величины скорости точки в моменты
- численные величины скорости точки в моменты  и
и  .
. .
. точка М1 неограниченно приближается к М и одновременно
точка М1 неограниченно приближается к М и одновременно .
. , получим для
, получим для  выражение
выражение .
. преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на
преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на  . Тогда будем иметь
. Тогда будем иметь ,
, равны:
равны:
 .
. ). Эти результаты выражают собою одну из важных теорем кинематики точки.
). Эти результаты выражают собою одну из важных теорем кинематики точки.
 и главной нормали
и главной нормали  и
и  , численно равные
, численно равные  и
и  (рис. 9). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая
(рис. 9). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая  будет всегда направлена в сторону вогнутости кривой (величина a всегда положительна), а составляющая
будет всегда направлена в сторону вогнутости кривой (величина a всегда положительна), а составляющая  в зависимости от знака проекции
в зависимости от знака проекции  (см. рис.9, а и б).
(см. рис.9, а и б). изображается диагональю параллелограмма, построенного на составляющих
изображается диагональю параллелограмма, построенного на составляющих  и
и  . Так как эти составляющие взаимно перпендикулярны, то по модулю:
. Так как эти составляющие взаимно перпендикулярны, то по модулю: .
.
 и
и  (рис. 12).
(рис. 12). , соединяющий эти точки.
, соединяющий эти точки. .
. ). Вследствие этого, траектория точки В получается из траектории точки А параллельным смещением всех ее точек на постоянный вектор
). Вследствие этого, траектория точки В получается из траектории точки А параллельным смещением всех ее точек на постоянный вектор  . Следовательно, траектории точек А и В будут действительно одинаковыми (при наложении совпадающими) кривыми.
. Следовательно, траектории точек А и В будут действительно одинаковыми (при наложении совпадающими) кривыми. .
. и
и  по времени дают скорости точек А и В. В результате находим, что
по времени дают скорости точек А и В. В результате находим, что ,
, или
или  .
. называют скоростью поступательного движения тела, а ускорение
называют скоростью поступательного движения тела, а ускорение  - ускорением поступательного движения тела. Векторы
- ускорением поступательного движения тела. Векторы  и
и 
 между этими полуплоскостями, который назовем углом поворота тела. Будем считать угол
между этими полуплоскостями, который назовем углом поворота тела. Будем считать угол  ), и отрицательным, если по ходу часовой стрелки. Измерять угол
), и отрицательным, если по ходу часовой стрелки. Измерять угол  .
. и угловое ускорение
и угловое ускорение  .
. тело совершает поворот на угол
тело совершает поворот на угол  , то численно средней угловой скоростью тела за этот промежуток времени будет
, то численно средней угловой скоростью тела за этот промежуток времени будет  . В пределе при
. В пределе при  найдем, что
найдем, что или
или  .
. , модуль которого равен |
, модуль которого равен |  | и который направлен вдоль оси вращения тела в ту сторону, откуда вращение видно происходящим против хода часовой стрелки (рис.14). Такой вектор определяет сразу и модуль угловой скорости, и ось вращения, и направление вращения вокруг этой оси.
| и который направлен вдоль оси вращения тела в ту сторону, откуда вращение видно происходящим против хода часовой стрелки (рис.14). Такой вектор определяет сразу и модуль угловой скорости, и ось вращения, и направление вращения вокруг этой оси.
 угловая скорость тела изменяется на величину
угловая скорость тела изменяется на величину  , то числовое значение среднего углового ускорения тела за этот промежуток времени будет
, то числовое значение среднего углового ускорения тела за этот промежуток времени будет  . В пределе при
. В пределе при  найдем,
найдем, или
или  .
. и
и  имеют одинаковые знаки, и замедленным, - когда разные.
имеют одинаковые знаки, и замедленным, - когда разные. .
. ,
,  .
. . Подставляя значение
. Подставляя значение  в выражения
в выражения  и
и  , получим:
, получим:

 ,
,  .
. всегда направлена по радиусу МС к оси вращения (рис.16). Полное ускорение точки М будет
всегда направлена по радиусу МС к оси вращения (рис.16). Полное ускорение точки М будет  или
или  .
. , который вычисляется по формуле
, который вычисляется по формуле  . Подставляя сюда значения
. Подставляя сюда значения  и
и  , получаем
, получаем  .
. имеют в данный момент времени для всех точек тела одно и то же значение, то ускорения всех точек вращающегося твердого тела пропорциональны их расстояниям от оси вращения и образуют в данный момент времени один и тот же угол
имеют в данный момент времени для всех точек тела одно и то же значение, то ускорения всех точек вращающегося твердого тела пропорциональны их расстояниям от оси вращения и образуют в данный момент времени один и тот же угол 
 , проведем из произвольной точки О оси АВ радиус-вектор
, проведем из произвольной точки О оси АВ радиус-вектор  точки М (рис. 17). Тогда
точки М (рис. 17). Тогда  и по формуле
и по формуле или
или  .
. равен модулю скорости точки М. Направления векторов
равен модулю скорости точки М. Направления векторов  - формула Эйлера, т.е. вектор скорости любой точки вращающегося тела равен векторному произведению угловой скорости тела на радиус-вектор этой точки.
- формула Эйлера, т.е. вектор скорости любой точки вращающегося тела равен векторному произведению угловой скорости тела на радиус-вектор этой точки. качается в вертикальной плоскости так, что
качается в вертикальной плоскости так, что  . Длина
. Длина  (рис. 19)
(рис. 19)
 , перпендикулярной вертикальной плоскости. Угловая скорость
, перпендикулярной вертикальной плоскости. Угловая скорость  угловое ускорение
угловое ускорение 


 (вращение по часовой стрелке);
(вращение по часовой стрелке);  (угловое ускорение направлено также по часовой стрелке). Вращение в этом положении ускоренное.
(угловое ускорение направлено также по часовой стрелке). Вращение в этом положении ускоренное. :
: 
 (определяется модуль скорости). Направлен вектор скорости соответственно направлению угловой скорости – в сторону вращения.
(определяется модуль скорости). Направлен вектор скорости соответственно направлению угловой скорости – в сторону вращения. . (Определён опять модуль вектора ускорения. Направлен вектор
. (Определён опять модуль вектора ускорения. Направлен вектор  вниз, как указывает угловое ускорение).
вниз, как указывает угловое ускорение).
 и
и  точки А и угол
точки А и угол  , который отрезок АВ образует с осью х. Точку А, выбранную для определения положения фигуры S, будем в дальнейшем называть полюсом.
, который отрезок АВ образует с осью х. Точку А, выбранную для определения положения фигуры S, будем в дальнейшем называть полюсом. .
. =const; это, очевидно, будет поступательное движение, при котором все точки фигуры движутся так же, как полюс А. Третье уравнение определяет движение, которое фигура совершала бы при
=const; это, очевидно, будет поступательное движение, при котором все точки фигуры движутся так же, как полюс А. Третье уравнение определяет движение, которое фигура совершала бы при  и
и  , т.е. когда полюс А неподвижен; это будет вращение фигуры вокруг полюса А. Отсюда можно заключить, что в общем случае движение плоской фигуры в ее плоскости может рассматриваться как слагающееся из поступательного движения, при котором все точки фигуры движутся так же, как полюс А, и из вращательного движения вокруг этого полюса.
, т.е. когда полюс А неподвижен; это будет вращение фигуры вокруг полюса А. Отсюда можно заключить, что в общем случае движение плоской фигуры в ее плоскости может рассматриваться как слагающееся из поступательного движения, при котором все точки фигуры движутся так же, как полюс А, и из вращательного движения вокруг этого полюса. ,
,  , а также угловая скорость
, а также угловая скорость  и угловое ускорение
и угловое ускорение  вращательного движения вокруг полюса.
вращательного движения вокруг полюса. . Отсюда, проектируя обе части равенства на ось, направленную по АВ, и учитывая, что вектор
. Отсюда, проектируя обе части равенства на ось, направленную по АВ, и учитывая, что вектор  перпендикулярен АВ, находим
перпендикулярен АВ, находим
 взять точку Р за полюс, то скорость точки А будет
взять точку Р за полюс, то скорость точки А будет ,
, . Аналогичный результат получается для любой другой точки фигуры. Следовательно, скорости точек плоской фигуры определяются в данный момент времени так, как если бы движение фигуры было вращением вокруг мгновенного центра скоростей. При этом
. Аналогичный результат получается для любой другой точки фигуры. Следовательно, скорости точек плоской фигуры определяются в данный момент времени так, как если бы движение фигуры было вращением вокруг мгновенного центра скоростей. При этом
 и т.д.
и т.д.
 и
и  каких-нибудь двух точек А и В плоской фигуры (или траектории этих точек); мгновенный центр скоростей находится в точке пересечения перпендикуляров, восставленных из точек А и В к скоростям этих точек (или к касательным к траекториям).
каких-нибудь двух точек А и В плоской фигуры (или траектории этих точек); мгновенный центр скоростей находится в точке пересечения перпендикуляров, восставленных из точек А и В к скоростям этих точек (или к касательным к траекториям). и
и  , найдем скорость
, найдем скорость  любой точки М плоской фигуры. Направлен вектор
любой точки М плоской фигуры. Направлен вектор  перпендикулярно РМ в сторону поворота фигуры.
перпендикулярно РМ в сторону поворота фигуры. плоской фигуры равна в каждый данный момент времени отношению скорости какой-нибудь точки фигуры к ее расстоянию от мгновенного центра скоростей Р:
плоской фигуры равна в каждый данный момент времени отношению скорости какой-нибудь точки фигуры к ее расстоянию от мгновенного центра скоростей Р: .
. ), и, следовательно, является мгновенным центром скоростей. Примером служит качение колеса по рельсу.
), и, следовательно, является мгновенным центром скоростей. Примером служит качение колеса по рельсу. т. е.
т. е.  ; аналогичный результат получается для всех других точек. Следовательно, в рассматриваемом случае скорости всех точек фигуры в данный момент времени равны друг другу и по модулю, и по направлению, т.е. фигура имеет мгновенное поступательное распределение скоростей (такое состояние движения тела называют еще мгновенно поступательным). Угловая скорость
; аналогичный результат получается для всех других точек. Следовательно, в рассматриваемом случае скорости всех точек фигуры в данный момент времени равны друг другу и по модулю, и по направлению, т.е. фигура имеет мгновенное поступательное распределение скоростей (такое состояние движения тела называют еще мгновенно поступательным). Угловая скорость 

 и
и  , то положение мгновенного центра скоростей Р, лежащего на перпендикуляре к
, то положение мгновенного центра скоростей Р, лежащего на перпендикуляре к  .
. можно заменить суммой
можно заменить суммой  .
. , которую называем основной или условно неподвижной (рис. 48). Каждая из этих систем отсчета связана, конечно, с определенным телом, на чертеже не показанным. Введем следующие определения.
, которую называем основной или условно неподвижной (рис. 48). Каждая из этих систем отсчета связана, конечно, с определенным телом, на чертеже не показанным. Введем следующие определения. ), a ускорение - относительным ускорением (обозначается
), a ускорение - относительным ускорением (обозначается  ). Из определения следует, что при вычислении
). Из определения следует, что при вычислении  и
и  можно движение осей Oxyz во внимание не принимать (рассматривать их как неподвижные).
можно движение осей Oxyz во внимание не принимать (рассматривать их как неподвижные). , является для точки М переносным движением.
, является для точки М переносным движением. ), а ускорение этой точки m - переносным ускорением точки М (обозначается
), а ускорение этой точки m - переносным ускорением точки М (обозначается  ). Таким образом,
). Таким образом, .
. , называется абсолютным или сложным. Траектория CD этого движения называется абсолютной траекторией, скорость - абсолютной скоростью (обозначается
, называется абсолютным или сложным. Траектория CD этого движения называется абсолютной траекторией, скорость - абсолютной скоростью (обозначается  ) и ускорение - абсолютным ускорением (обозначается
) и ускорение - абсолютным ускорением (обозначается  ).
). точки О и движения вокруг мгновенной оси вращения ОР, походящей через точку О, с мгновенной угловой скоростью
точки О и движения вокруг мгновенной оси вращения ОР, походящей через точку О, с мгновенной угловой скоростью  . Вследствие переносного движения подвижной системы отсчета радиус-вектора
. Вследствие переносного движения подвижной системы отсчета радиус-вектора  и направления единичных векторов
и направления единичных векторов  изменяются. Если векторы
изменяются. Если векторы  заданы в функции времени, то переносное движение подвижной системы отсчета вполне определено.
заданы в функции времени, то переносное движение подвижной системы отсчета вполне определено.
 ,
, задан в функции времени, то относительное движение точки М, т.е. движение этой точки относительно подвижной системы отсчета, задано.
задан в функции времени, то относительное движение точки М, т.е. движение этой точки относительно подвижной системы отсчета, задано. , может быть определено радиусом-вектором
, может быть определено радиусом-вектором  . Из рис.49 видно, что
. Из рис.49 видно, что . (1)
. (1) определены в функции времени, то слагающееся из относительного и переносного движений составное движение точки М, т.е. движение этой точки по отношению к неподвижной системе отсчета, также надо считать заданным.
определены в функции времени, то слагающееся из относительного и переносного движений составное движение точки М, т.е. движение этой точки по отношению к неподвижной системе отсчета, также надо считать заданным. .
. . (2)
. (2)  , т.е. от величин, изменяющихся только вследствие переносного движения подвижной системы отсчета
, т.е. от величин, изменяющихся только вследствие переносного движения подвижной системы отсчета (3)
(3)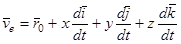 . (4)
. (4) , представляет собой, по крайней мере, по размерности некоторую скорость. Выясним физический смысл скоростей
, представляет собой, по крайней мере, по размерности некоторую скорость. Выясним физический смысл скоростей  и
и  .
. , как это следует из равенства (3), вычисляется в предположении, что изменяются только относительные координаты x , y , z точки М, но векторы
, как это следует из равенства (3), вычисляется в предположении, что изменяются только относительные координаты x , y , z точки М, но векторы  остаются постоянными, т.е. подвижная система отсчета Oxyz как бы условно считается неподвижной. Итак, скорость
остаются постоянными, т.е. подвижная система отсчета Oxyz как бы условно считается неподвижной. Итак, скорость  вычисляется так, как будто бы точка М не двигалась относительно подвижной системы отсчета, так как производные x , y , z в равенство (4) не входят. Поэтому скорость
вычисляется так, как будто бы точка М не двигалась относительно подвижной системы отсчета, так как производные x , y , z в равенство (4) не входят. Поэтому скорость  . (5)
. (5) (см) и
(см) и  (рад).
(рад).
 . Траектория переносного движения точки М в момент времени t – окружность радиуса
. Траектория переносного движения точки М в момент времени t – окружность радиуса  .
.
 . И направлена по касательной к траектории вдоль стержня (рис.50). Переносная скорость колечка, как при вращении вокруг оси,
. И направлена по касательной к траектории вдоль стержня (рис.50). Переносная скорость колечка, как при вращении вокруг оси,  . Направлен вектор этой скорости по касательной к траектории переносного движения, перпендикулярно стержню.
. Направлен вектор этой скорости по касательной к траектории переносного движения, перпендикулярно стержню. . Величина ее, т.к.
. Величина ее, т.к. 
 .
. и поэтому поворотное ускорение
и поэтому поворотное ускорение  точки также равно нулю. Поворотное ускорение равно, очевидно, нулю и в том случае, когда
точки также равно нулю. Поворотное ускорение равно, очевидно, нулю и в том случае, когда  в данный момент времени обращается в нуль.
в данный момент времени обращается в нуль. точки параллелен вектору угловой скорости
точки параллелен вектору угловой скорости  переносного вращения, т.е. относительное движение точки происходит по направлению, параллельному оси переносного вращения;
переносного вращения, т.е. относительное движение точки происходит по направлению, параллельному оси переносного вращения; точки в данный момент времени равна нулю (
точки в данный момент времени равна нулю (  ).
). ,
,  ,
,  и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина - модуль.
и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина - модуль.
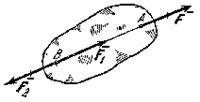
 (рис.11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы
(рис.11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы  и
и  , такие, что
, такие, что  =
=  ,
,  =
=  . От этого действие силы
. От этого действие силы  на тело не изменится. Но силы
на тело не изменится. Но силы  согласно аксиоме 1 также образуют уравновешенную систему, которая может быть отброшена. В результате на тело. Будет действовать только одна сила
согласно аксиоме 1 также образуют уравновешенную систему, которая может быть отброшена. В результате на тело. Будет действовать только одна сила  , равная
, равная  , равный диагонали параллелограмма, построенного на векторах
, равный диагонали параллелограмма, построенного на векторах  и
и  (рис.12), называется геометрической суммой векторов
(рис.12), называется геометрической суммой векторов  :
:  =
=  .
.
 Такое равенство будет соблюдаться только при условии, что эти силы направлены по одной прямой в одну сторону. Если же векторы сил окажутся перпендикулярными, то
Такое равенство будет соблюдаться только при условии, что эти силы направлены по одной прямой в одну сторону. Если же векторы сил окажутся перпендикулярными, то 
 =
=  (рис. 13). Однако силы
(рис. 13). Однако силы 

 ).
).
 стержня будет направлена вдоль оси стержня.
стержня будет направлена вдоль оси стержня. такой опоры направлена по нормали к поверхности, на которую опираются катки подвижной опоры.
такой опоры направлена по нормали к поверхности, на которую опираются катки подвижной опоры. такой опоры проходит через ось шарнира и может иметь любое направление в плоскости чертежа. При решении задач будем реакцию
такой опоры проходит через ось шарнира и может иметь любое направление в плоскости чертежа. При решении задач будем реакцию  изображать ее составляющими
изображать ее составляющими  и
и  по направлениям осей координат. Если мы, решив задачу, найдем
по направлениям осей координат. Если мы, решив задачу, найдем 
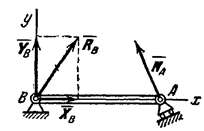
 ,
,  ,
,  ,
,  .
. , приложенной в этом центре, и парой с наперед неизвестным моментом
, приложенной в этом центре, и парой с наперед неизвестным моментом  . Силу
. Силу  можно в свою очередь изобразить ее составляющими
можно в свою очередь изобразить ее составляющими  и
и  . Таким образом, для нахождения реакции неподвижной защемляющей опоры надо определить три неизвестных величины
. Таким образом, для нахождения реакции неподвижной защемляющей опоры надо определить три неизвестных величины  ,
,  и
и  . Если под такую балку где-нибудь в точке В подвести еще одну опору, то балка станет статически неопределимой.
. Если под такую балку где-нибудь в точке В подвести еще одну опору, то балка станет статически неопределимой.
 на ось Ох будем символом
на ось Ох будем символом  . Тогда для сил, изображенных на рис. 12, получим:
. Тогда для сил, изображенных на рис. 12, получим: ,
,  .
. ,
,  .
. ,
,  ,
,
 на плоскость Оху называется вектор
на плоскость Оху называется вектор  , заключенный между проекциями начала и конца силы
, заключенный между проекциями начала и конца силы  , где
, где  — угол между направлением силы
— угол между направлением силы  .
.
 ,
,  , …,
, …,  сходятся в точке A (рис. 14, а), то сила, равная главному вектору
сходятся в точке A (рис. 14, а), то сила, равная главному вектору  , величиной
, величиной  а затем его проектируем на ось х:
а затем его проектируем на ось х: 
 .
. .
.


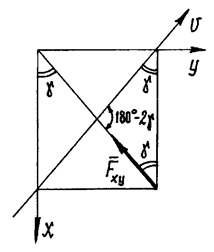
 . Спроектируем это векторное равенство на оси. Получим проекции равнодействующей
. Спроектируем это векторное равенство на оси. Получим проекции равнодействующей 
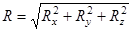 или
или .
. 


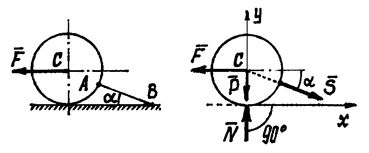
 и нормальную реакцию плоскости –
и нормальную реакцию плоскости –  (рис.18). Кроме них на шар действуют заданные силы
(рис.18). Кроме них на шар действуют заданные силы  и
и  .
.
 ,
,



 относительно центра О называется величина, равная взятому с соответствующим знаком произведению модуля силы на длину плеча.
относительно центра О называется величина, равная взятому с соответствующим знаком произведению модуля силы на длину плеча. относительно центра О будем обозначать символом m0(F). Следовательно,
относительно центра О будем обозначать символом m0(F). Следовательно,


 ,
,  , …,
, …,  ), … . По формуле
), … . По формуле  . Но, как видно из рисунка,
. Но, как видно из рисунка,  , где F1x - проекция силы
, где F1x - проекция силы  .
.  , через
, через  . Тогда, по теореме о проекции суммы сил на ось, получим
. Тогда, по теореме о проекции суммы сил на ось, получим  . Умножая обе части этого равенства на ОА, найдем:
. Умножая обе части этого равенства на ОА, найдем:
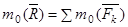 .
. ,
,  и
и  .
.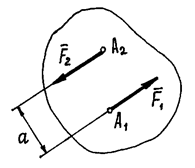
 .
. направляется перпендикулярно плоскости, в которой расположена пара, в такую сторону, что если посмотреть оттуда, увидим вращение тела против часовой стрелки (рис. 23).
направляется перпендикулярно плоскости, в которой расположена пара, в такую сторону, что если посмотреть оттуда, увидим вращение тела против часовой стрелки (рис. 23). – есть вектор этого векторного произведения (рис. 23). И заметим, что он равен вектору момента силы
– есть вектор этого векторного произведения (рис. 23). И заметим, что он равен вектору момента силы  относительно точки А, точки приложения второй силы:
относительно точки А, точки приложения второй силы: .
. будет сказано ниже. Пока приложим его к точке А.
будет сказано ниже. Пока приложим его к точке А.
 и
и  составляющих пару, относительно какой-либо точки О (рис.24).
составляющих пару, относительно какой-либо точки О (рис.24).
 , соединяющий эти точки. Тогда момент пары сил относительно точки О
, соединяющий эти точки. Тогда момент пары сил относительно точки О .
. . Поэтому
. Поэтому  .
. , а
, а  .
. .
. .
. и неважно где расположенные на теле, оказывают на него равное действие. То есть такие пары эквивалентны.
и неважно где расположенные на теле, оказывают на него равное действие. То есть такие пары эквивалентны. ,
,  – угол между вектором
– угол между вектором  .
. .
.  .
. .
. 
 .
.

 и
и  , параллельные силе
, параллельные силе  и равные ей по величине:
и равные ей по величине: 
 , приложенную к точке О. То есть мы как бы перенесли заданную силу
, приложенную к точке О. То есть мы как бы перенесли заданную силу  . Момент этой пары
. Момент этой пары  , равен моменту заданной силы
, равен моменту заданной силы  введем два определения.
введем два определения. (3.1)
(3.1) . (3.2)
. (3.2) Рассмотрим систему сил
Рассмотрим систему сил  ,
, ;
; ,
, .
. ,
,
 Рис. 3.3.
Рис. 3.3.
 (рис. 3.3). Сила
(рис. 3.3). Сила  не зависит от выбора центра приведения и равна сумме всех сил системы, т.е.
не зависит от выбора центра приведения и равна сумме всех сил системы, т.е. .
.

 .
. , (3.3)
, (3.3) и
и  . Тогда вследствие формулы (3.3) для любого центра
. Тогда вследствие формулы (3.3) для любого центра  и
и  .
. Рассмотрим систему сил
Рассмотрим систему сил  , приложенную в точке A (рис. 3.5). Приложим уравновешивающую силу
, приложенную в точке A (рис. 3.5). Приложим уравновешивающую силу  в этой же точке и получим систему сил
в этой же точке и получим систему сил  ~ 0, главный момент которой относительно точки O
~ 0, главный момент которой относительно точки O . (3.7)
. (3.7)

 ,
, , (3.8)
, (3.8) . (3.9)
. (3.9) ,
,  ,…,
,…,  (рис. 44, а). Выберем произвольную точку О за центр приведения и перенесем все силы системы в этот центр, присоединяя при этом соответствующие пары. Тогда на тело будет действовать система сил
(рис. 44, а). Выберем произвольную точку О за центр приведения и перенесем все силы системы в этот центр, присоединяя при этом соответствующие пары. Тогда на тело будет действовать система сил =
=  =
=  =
=  .
. =
=  (
(  =
=  (
(  =
=  (
(  ),
), или,
или, .
. или,
или, .
. , равная геометрической сумме моментов всех сил относительно центра О, называется главным моментом системы относительно этого центра.
, равная геометрической сумме моментов всех сил относительно центра О, называется главным моментом системы относительно этого центра.
 или,
или,  . Аналогично находятся величины My и Mz.
. Аналогично находятся величины My и Mz. 

 можно отыскать точку с координатами
можно отыскать точку с координатами  . И координата
. И координата  по (2), будет равна нулю, т.к. в сумме
по (2), будет равна нулю, т.к. в сумме  все члены имеющие противоположные знаки, попарно уничтожаются. Значит центр тяжести расположен в плоскости симметрии.
все члены имеющие противоположные знаки, попарно уничтожаются. Значит центр тяжести расположен в плоскости симметрии. можно отыскать точку с координатами
можно отыскать точку с координатами  и координаты
и координаты  и
и  , вычисленные по формулам (2), окажутся равными нулю.
, вычисленные по формулам (2), окажутся равными нулю. – определять как вес соответствующей части и
– определять как вес соответствующей части и  , где
, где  - удельный вес материала, из которого сделано тело, а
- удельный вес материала, из которого сделано тело, а  - объём этой части тела. И формулы (1) примут более удобный вид. Например,
- объём этой части тела. И формулы (1) примут более удобный вид. Например,

 где
где  - объём всего тела.
- объём всего тела. где
где  – площадь пластины, d – толщина. И координаты центра тяжести будут определяться только с помощью площадей:
– площадь пластины, d – толщина. И координаты центра тяжести будут определяться только с помощью площадей:
 – координаты центра тяжести отдельных пластин;
– координаты центра тяжести отдельных пластин;  – общая площадь тела.
– общая площадь тела. где l i – длина,
где l i – длина,  – вес единицы длины (погонного метра), а координаты центра тяжести будут определяться с помощью длин отдельных участков:
– вес единицы длины (погонного метра), а координаты центра тяжести будут определяться с помощью длин отдельных участков:
 – координаты центра тяжести
– координаты центра тяжести  -го участка;
-го участка; 


 - вес единицы площади тела,
- вес единицы площади тела,  - вес всего тела.
- вес всего тела.



 - вес единицы длины тела ,
- вес единицы длины тела , - вес всего тела.
- вес всего тела.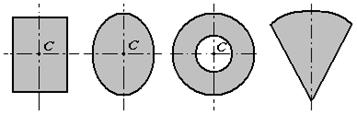




 .
.



 , который полная реакция шероховатой связи образует с нормалью к поверхности, называется углом трения. Из чертежа видно, что
, который полная реакция шероховатой связи образует с нормалью к поверхности, называется углом трения. Из чертежа видно, что
 , отсюда находим следующую связь между углом трения и коэффициентом трения:
, отсюда находим следующую связь между углом трения и коэффициентом трения:
 вокруг направления нормальной реакции.
вокруг направления нормальной реакции. с нормалью (рис. 27), то тело сдвинется только тогда, когда сдвигающее усилие
с нормалью (рис. 27), то тело сдвинется только тогда, когда сдвигающее усилие  будет больше
будет больше  (мы считаем
(мы считаем  , пренебрегая весом тела). Но неравенство
, пренебрегая весом тела). Но неравенство  , в котором
, в котором  , выполняется только при
, выполняется только при  , т.е. при
, т.е. при  . Следовательно, никакой силой, образующей с нормалью угол
. Следовательно, никакой силой, образующей с нормалью угол  , тело вдоль данной поверхности сдвинуть нельзя. Этим объясняются известные явления заклинивания или самоторможения тел.
, тело вдоль данной поверхности сдвинуть нельзя. Этим объясняются известные явления заклинивания или самоторможения тел.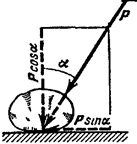
 и
и  также движется поступательно (любая проведенная в нем прямая остается параллельной ее начальному направлению). Точки спарника движутся при этом по окружностям.
также движется поступательно (любая проведенная в нем прямая остается параллельной ее начальному направлению). Точки спарника движутся при этом по окружностям.
