|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Устройство и основы теории сейсмоприёмников
Сейсмоприёмник (СП) или геофон (в иностранной литературе) – устройство, воспринимающее механические колебания среды, в которой он установлен, и преобразующее их в электрические колебания (сигнал). Так как механические колебания среды есть непрерывная функция времени (t), то сигнал также является непрерывной функцией t, аналогом механических колебаний. (термин «аналоговый» в сейсморазведке синоним термина «непрерывный во времени»). Для преобразования механических колебаний в электрический сигнал используются следующие физические явления: - электромагнитная индукция; - пьезоэлектрический эффект; - изменение емкости воздушного конденсатора; - магнитострикционный эффект (точнее – эффект Виллари, обратный магнитострикции). В наземных и скважинных наблюдениях используются главным образом электромеханические (индукционные) СП, в морской – пьезоэлектрические. 4.1. Индукционные сейсмоприёмники. Конструктивная схема СП. Кинематическая схема СП. Преобразователь представляет собой подвижную (подвешенную на пружине с одной степенью свободы) катушку, помещенную в поле постоянного магнита, жестко закрепленного на корпусе. При перемещении катушки изменяется величина магнитного потока, проходящего через катушку, и на её выводах возникает ЭДС. 4.1.1. Вывод дифференциального уравнения индукционного СП Корпус СП с помощью штыка жестко закреплен на грунте. Пусть в результате упругих колебаний корпус СП переместился вверх на расстояние хк. Под действием сил инерции инертная масса сместилась вверх на хМ < хк. Относительное удлинение пружины (перемещение инертной массы относительно корпуса) составляет x = xM - xк (25) Примечания: 1. Возникновение ЭДС(и как следствие – электрического сигнала) связано с движением инертной массы: xM= xM (t ); x к = x к (t ). 2. При рассмотрении движения можно исключить силу начального растяжения пружины: при малых смещениях х она полностью уравновешивается силой тяжести. Движение СП рассмотрим в спектральной области: ~ смещение корпуса x к (t ) <=> X к ( w ); ~ смещение катушки xM (t ) <=> XM ( w ); ~ относительное смещение х( t ) <=> X ( w ); Движение инертной массы осуществляется при участии следующих сил: * Сила упругости пружины fy ( t ) <=> Fy ( w ) При малой амплитуде колебаний fy(t) связано с удлинением fy ( t ) с законом Гука: fy ( t ) = - N х( t ) <=> Fy ( w ) = - NX ( w ) (26) где N – коэффициент упругости пружины; Сила fy ( t ) имеет знак, противоположный знаку х( t ),т.к. стремится восстановить первоначальное состояние пружины. * Сила инерции fn ( t ) <=> Fn ( w ) В соответствии с первым законом Ньютона fn(t)= - М В соответствии с теоремой о спектре производной: Fn(w) = (j w)2М×[Х( w )+Хк( w )] (27) * Сила затухания fT(t) <=> FT(w) Для гашения собственных колебаний упругой системы СП в неё вводят элемент затухания. Для упрощения рассуждений примем ,что колебания системы {пружина+инертная масса} погружена в вязкую жидкость и на неё действует сила вязкого трения, которая при небольших скоростях перемещения прямо пропорциональна скорости смещения fT(t)= - D где D – коэффициент вязкого трения (или коэффициент демпфирования). Согласно теореме о спектре производной FT (ω) = - jω D X(ω) (29) Кроме механических сил в СП действует электромагнитная сила, возникающая в схеме индукционного преобразователя. - Скорость смещения инертной массы ( катушки) относительно магнита где w – число витков катушки, j - магнитный поток, пронизывающий виток, - Сила тока, создаваемого ЭДС i= где Z-комплексное сопротивление электрической .цепи (будем полагать чисто активным; Z=R). - При протекании тока i в катушке преобразователя создаётся электромагнитная сила fэ(t), направленная в сторону, противоположную направления смещения катушки (правило Ленца): f э (t)= - w·i ~ с учётом (31): f э (t)= - i ~ заменяя i из(32) и учитывая (30): f э ( t )= - ~ в спектральной области: f э ( t ) <=> F э( w )= = В соответствии с правилом Д’Аламбера уравнение движения инертной массы можно записать как : fy ( t ) + fn ( t ) + fT ( t ) = f э ( t ) =0 - NX - ( j w )2 × ( X + Xk ) × M - j w DX - ( j w ~ Разделяя в (36) движение грунта и движение катушки получим: { N +( j w )2 M +( j w )( D + где G = G(w )= j w Xk ( w ) - спектр скорости смещения корпуса СП. Т.О.соотношение (37) устанавливает связь между спектром смещения корпуса Х k ( w ) или спектром скорости смещения G(w ) и спектром относительного перемещения инертной массыX( w ). - Представим полное сопротивление электрической цепи как R = R 1 + R 2 (38) где R1 - сопротивление преобразователя; R2 - сопротивление нагрузки. - Пусть измеряемой реакцией СП на механическое смещение является падение напряжения U(t) на нагрузке R2 Т.Е. U ( t ) = - Из (30) E ( w )=( j w ) U(w)= Выражая X(w) через U(w) и заменяя в (37) {( j w )2М+( j w )[ D + {( j w )2М+( j w )[ D + Выражение(40) в спектральной форме описывает действие индукционного СП, связывая спектр скорости смещения корпуса ( G ( w )) со спектром снимаемого с нагрузки напряжения ( U (( w )). Слагаемые в левой части уравнения(40) можно рассматривать как: Тогда можно представить: ~ ~ ~ ( Разделив на М левую и правую части выражения (40) можно записать: [( j w )2+2( j w )
4.1.2. Характеристики СП с активной нагрузкой Из уравнения движения (41)можно получить комплексную частотную характеристику СП (и, следовательно, АЧХ,ФЧХ). Входной функцией преобразователя СП являются скорость (спектр) скорости смещения корпуса g ( t) ó G ( w ). Выходной функцией – напряжение на активной нагрузке R2: u ( t ) ó U ( w ) (cпектр напряжения). Комплексная частотная характеристика СП: Hc ( w ) = U ( w )/ G ( w ), или в соответствии с выражением (41) Hc ( w ) = Обозначим: b = xc / w 0 c - коэффициент затухания, отнесённый к собственной частоте СП, Тогда Hc= АЧХ и ФЧХ СП можно получить представив Hc ( w ) как сумму действительной и мнимой части Hc ( w ) = A ( w ) - jB ( w ), соответственно: АЧХ: | Hc n | =Kc( n )== Опуская громоздкие преобразования можно получить: ÷ Hc ( n ) ç =Кc ( n )= ϰ c ( n )=arc tg АЧХ (44) выражает зависимость отношения спектра электрического напряжения U к спектру скорости смещения корпуса G от частоты вынужденных гармонических колебаний. ФЧХ (45) определяет сдвиг фазы напряжения по отношению к фазе скорости. Рассмотрим характер зависимости частотной характеристики от затухания. Из (44) видно, что: при n =0: Кс(0) = 0 (все кривые исходят из начальной координаты), при n =1: Кс (1) = a / 2 b , при n = ¥ : Кс( n ) ® a , т.к. b << n, то подкоренное выражение в знаменателе равенства (44) (1-2n2 + n4 + 4n2)= (1+2n2+n4)=(1+n2)2, при n >>1 выражение (1+n2)2 стремится к n4. -Экстремальные значения К c ( n ) можно найти из соотношения d К c ( n )/ d n =0: n 1 = 0 (минимальное значение), n 2 = ~ Из (46) видно, что так К c ( n ) является действительной величиной только при b ~ Величина b = 1 / Графики АЧХ показаны на рисунке ниже:
Выделяется ещё одно – критическое – значение относительного затухания b : b = 1 = b критическое (47)
Затухание реальных СП выбирается обычно в интервале b опт < b < b крит
Логарифмическая крутизна АЧХ: S ( n )= При n << 1 (т.е. w<<w0с), то S(n) » 2: это означает, что спектр сигналов, который лежит в этом диапазоне относительных частот, дважды дифференцирован, т.е .U(t) по форме совпадает со второй производной скорости смещения g (t). При n→1 логарифмическая крутизна S(n) » 1. Для оценки значения S ( n ) при n>>1 преобразуем выражение (48) S ( n ) = Определим граничные относительные частоты (nгран) для b ³ bопт. ~ Из анализа графиков: К c ( n max ) = К c ( ¥ )= a ~ Исходя из условия К c ( n гр )=0.707 К c ( n max )=0.707a и учитывая ,что 0.707 » при bопт= при bкр=1 => n4гр-2n2гр-1=0 => nгр»1.56 Фазовые характеристики СП: Из выражения (45) следует :
Графики фазово-частотных характеристик сейсмоприёмника показаны ниже:
- Используя эту особенность
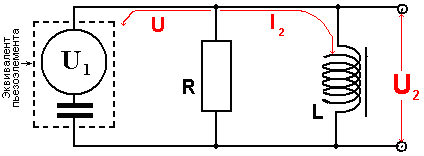
4.1.3. Реакция СП на импульсное воздействие Для оценки реакции СП на импульсное воздействие получим на основании выражения (42) импульсную реакцию СП (используя Фурье-преобразование f ( t )= hc (t)= Исследуем полученное выражение. Возможны два случая: ~ при b < 1 решением (50) будет : hc ( t ) = A Выражение (51) описывает затухающую синусоиду, затухания определяется экспоненциальной функцией ~ при b > 1 решением (50) будет: hc(t)= hc ( t ) - гранично-апериодическая функция. 4.2. Пьезоэлектрические сейсмоприёмники В жидкой среде существуют только волны давления и для преобразования механических колебаний в электрический сигнал целесообразно использовать пьезоэлектрический эффект. В пьезокерамическом элементе, работающим на сжатие или изгиб, на гранях возникают электрические заряды. Вследствие присущей элементу электрической ёмкости (С) на гранях возникает разность потенциалов U1, прямо пропорциональная приложенному давлению p: U 1=d × p (55) где d - коэффициент, зависящий от вида пьезоэлемента , его конструктив- Переменное во времени давление в безграничной среде можно представить как p ( t ) = r Vpg(t) (56) где r - плотность жидкости; V r - cкорость продольных волн в жидкости; g(t) - скорость относительного перемещения частиц в жидкости. Эквивалентная схема пьезосейсмоприёмника предствлена ниже: R-активнаянагрузка
L-индуктивность трасформатора.
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 331; Нарушение авторского права страницы
 fn ( t ) прямо пропорционально ускорению инертной массы и направлена в сторону, противоположную ускорению.
fn ( t ) прямо пропорционально ускорению инертной массы и направлена в сторону, противоположную ускорению. = - М
= - М  (26)
(26) (28)
(28) . Тогда ЭДС в обмотке: e =w
. Тогда ЭДС в обмотке: e =w  =
=  (30)
(30) – коэффициент электромеханической связи. (31)
– коэффициент электромеханической связи. (31) , (32)
, (32) (33)
(33) (34)
(34)
 (35)
(35) ó U ( w ) =
ó U ( w ) =  ,где е( t )ó E ( w )
,где е( t )ó E ( w )
 [( j w ) X ]=
[( j w ) X ]=  [( j w ) X ] (39)
[( j w ) X ] (39) /
/ 
 =
=  c - коэффициент затухания СП
c - коэффициент затухания СП =2
=2  f 0 c = w 0 c - частота собственных колебаний СП
f 0 c = w 0 c - частота собственных колебаний СП =
=  (42)
(42)  n = w ¤ w 0с = f / f 0 c – относительная частота колебаний
n = w ¤ w 0с = f / f 0 c – относительная частота колебаний (43)
(43)
 ; (44)
; (44) ; (45)
; (45) ; (46)
; (46) £ 1
£ 1
 =
=  ; (48)
; (48) =
=  ;
;  ), выражение (44) можно записать как: n4гр+2(1-2b2) n2гр-1 = 0
), выражение (44) можно записать как: n4гр+2(1-2b2) n2гр-1 = 0 => n4гр =1, nгр=1.
=> n4гр =1, nгр=1. (49)
(49) - Все фазовые характеристики
- Все фазовые характеристики  F ( w ) ej w t d w). Преобразуем H(w) в h(t).
F ( w ) ej w t d w). Преобразуем H(w) в h(t). ejwtdw (50)
ejwtdw (50) sin(w 1 t + j 0) (при t
sin(w 1 t + j 0) (при t  0) (51)
0) (51) e
e  +
+  e
e  ]e
]e  (53)
(53)