|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Установка машины в рабочее положение
Машина Phoenix-Lite имеет два стандартных положения: рабочее и транспортное. Перед началом работы машины она должна быть установлена в рабочее положение (рис. 3-3).
Для перемещения или хранения машины нужно использовать транспортное положение (рис. 3-4).
Для перевода машины из транспортного в рабочее положение встаньте лицом к нижней части машины, возьмитесь обеими руками за ручку для подъема и аккуратно опустите ее в горизонтальное положение. Не отпускайте ручку, пока все четыре колеса не коснутся поверхности дорожки.
Для перевода машины из рабочего в транспортное положение встаньте со стороны передней части (сторона с форсунками, разбрызгивающими очиститель) машины, возьмитесь обеими руками за ручку для подъема и аккуратно поднимите ее в вертикальное положение. Не отпускайте ручку, пока все четыре колеса не коснутся поверхности дорожки.
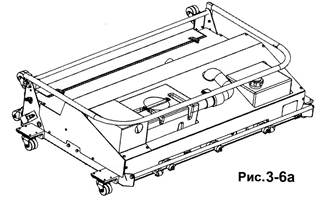
Ручка
Ручка машины, изображенная на рис. 3-6а и 3-6b, может быть установлена в любое положение (180˚ по горизонтали). Это позволит вам ставить ее в удобное положение вне зависимости от операции, выполняемой в данный момент.
Замечание: в момент начала движения машины по дорожке опустите ручку на достаточную высоту для того, чтобы при движении машины не была задета маскировочная панель.
На ручке расположена кнопка START и специальные крепежные ремешки. Кнопка START выполняет то же самое, что и кнопка START, расположенная на панели управления.
Рекомендуемая процедура подключения кабеля питания:
Такая процедура предотвращает случайное срабатывание заднего датчика.
Оптические датчики
Передний и задний оптические датчики определяют, достигла ли машина при своем движении по дорожке пиндека или зоны игрока.
Передний датчик находится на нижней части машины, как показано на рис. 3-8. Он направлен на поверхности дорожки. Сигналы с этого датчика используются машиной только при ее движении от зоны игрока к пиндеку. Датчик постоянно сканирует расстояние до поверхности дорожки, когда машина достигает окончания пиндека, датчик посылает сигнал машине.
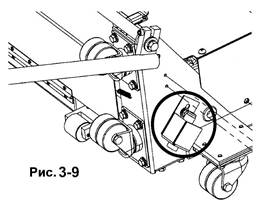
Задний датчик расположен на правой боковой части машины на кронштейне (рис. 3-9). Датчик направлен в правый желоб немного назад от машины. Сигналы с этого датчика используются машиной только при ее движении от пиндека к зоне игрока. Датчик постоянно сканирует расстояние до поверхности желоба, когда машина достигает начала зоны игрока (адаптера), датчик посылает сигнал машине.
Замечания:
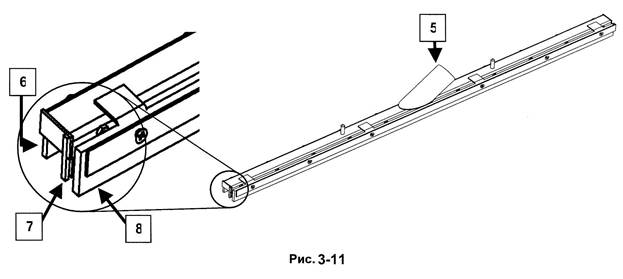
Отделение очистки.
Компоненты, из которых состоит отделение очистки, представлены на рис. 3-10 и 3-11, и описаны ниже.
|
Последнее изменение этой страницы: 2019-04-20; Просмотров: 200; Нарушение авторского права страницы




 Крепежные ремешки служат для крепления кабеля питания, чтобы при движении машины по дорожке не повредить его.
Крепежные ремешки служат для крепления кабеля питания, чтобы при движении машины по дорожке не повредить его.