|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчет и построение нагрузочной характеристики асинхронного двигателя МАП422-4/8ОМ1 ⇐ ПредыдущаяСтр 5 из 5
2.4.1 Определение скорости выбирания якорной цепи Определяем скорость выбирания якорной цепи по стадиям
Продолжительность каждой стадии:
Расчетное значение полного времени съемки судна с якоря:
Средняя скорость съемки судна с якоря:
Время подъема якоря, висящего на полностью вытравленной цепи
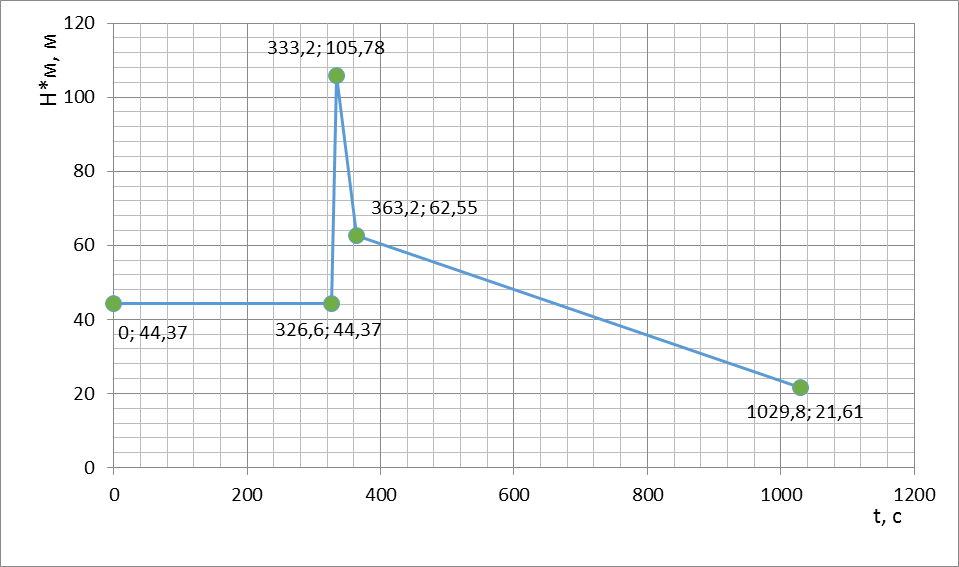
Рисунок 2.4. Нагрузочная диаграмма электропривода якорно-швартовного устройства при съемке судна с якоря
Проверка второго двигателя на нагрев
АНАЛИТИЧЕСКАЯ ЧАСТЬ Выбор двигателя и анализ технико-экономической части Таблица 3.1. Сравнительные характеристики двигателей.
Исходя из данных таблицы, полученных в ходе расчетов, видно, что электропривод с исполнительным двигателем серии МАП421-4/8ОМ1 имеет ряд преимуществ над электроприводом с исполнительным двигателем серии МАП422-4/8ОМ1: · меньшее время съемки судна с якоря · большую среднюю скорость съемки судна с якоря · меньшее время подъема якоря, висящего на полностью вытравленной цепи · меньший среднеквадратичный момент, свидетельствующий о меньшей температурной нагрузке Вывод: Электропривод с исполнительным двигателем серии МАП421-4/8ОМ1 более предпочтителен. Анализ систем управления Выбор для электропривода якорно-швартовного устройства той или иной схемы управления (контроллерной, релейно-контакторной, электромашинной, бустерной или др.) зависит от мощности исполнительного двигателя. Весьма перспективными в настоящее время считаются схемы тиристорного управления. По условиям работы якорно-швартовного устройства его электропривод должен работать в кратковременном режиме, обеспечивая подъем и спуск якоря с различными скоростями, плавный пуск под полной нагрузкой и торможение, а также стоянку исполнительного двигателя под током в течение 0, 5 мин. Контроллерные схемы управления. Эти схемы используются при мощности исполнительного двигателя до 10 кВт (реже — до 25 кВт). Контроллерные схемы, предназначенные для электроприводов небольшой мощности, отличаются простотой и надежностью работы, малым весом и небольшими габаритами, а также сравнительной дешевизной. С увеличением мощности привода схемы становятся все менее надежными и более громоздкими. К числу недостатков этих схем относится и то, что они не обеспечивают: а) автоматического ограничения момента двигателя при отрыве якоря от грунта, что в установках большой мощности может вызвать поломки в механизме или обрыв якорной цепи (увеличение мощности всегда сопровождается уменьшением запаса прочности механизмов); б) Ограничения бросков пусковых и тормозных токов, что может явиться причиной кругового огня на коллекторе и короткого замыкания в щеточном механизме двигателя. Сказанное объясняет, почему контроллерные схемы управления требуют для своего обслуживания квалифицированного персонала. Применение релейно-контакторных схем в электроприводах большой мощности заставляет увеличивать число пусковых и регулировочных ступеней, в связи с чем возрастает количество аппаратов управления и соответственно снижается надежность работы установки. К тому же усложняется уход за ней. С увеличением мощности привода значительно возрастают вес и габариты оборудования и, в первую очередь, сопротивлений. Схема становится соизмеримой по весу с системой Г—Д. Электромашинные схемы управления. Система Г—Д удовлетворяет всем требованиям электропривода якорно-швартовного устройства в отношении плавности пуска, торможения и регулирования скорости в нужных пределах. Наличие лишь малого количества аппаратов управления и применение двух двигательных брашпилей делает электромашинные схемы высоко надежными в работе. Недостатком системы Г—Д является ее высокая стоимость, а при небольших мощностях — значительно больший вес и большие габариты по сравнению с другими схемами. Поэтому систему генератор—двигатель можно рекомендовать лишь для якорно-швартовных устройств, мощность электропривода которых превышает 50 кВт. 3.3 Анализ защиты электродвигателей Для того чтобы защитить электродвигатель от повреждений при нарушении нормальных условий работы, а также своевременно отключить неисправный двигатель от сети, предотвратив или ограничив тем самым развитие аварии, предусматриваются средства защиты. В зависимости от характера возможных повреждений и ненормальных режимов работы различают несколько основных наиболее распространенных видов электрической защиты асинхронных двигателей. Защита от коротких замыканий отключает двигатель при появлении в его силовой (главной) цепи или в цепи управления токов короткого замыкания. Аппараты, осуществляющие защиту от коротких замыканий (плавкие предохранители, электромагнитные реле, автоматические выключатели с электромагнитным расцепителем), действуют практически мгновенно, т. е. без выдержки времени. Защита от перегрузки предохраняет двигатель от недопустимого перегрева, в частности и при сравнительно небольших по величине, но продолжительных тепловых перегрузках. Защита от перегрузки должна применяться только для электродвигателей тех рабочих механизмов, у которых возможны ненормальные увеличения нагрузки при нарушениях рабочего процесса. Аппараты защиты от перегрузки (температурные и тепловые реле, электромагнитные реле, автоматические выключатели с тепловым расцепителем или с часовым механизмом) при возникновении перегрузки отключают двигатель с определенной выдержкой времени, тем большей, чем меньше перегрузка, а в ряде случаев, при значительных перегрузках, — и мгновенно. Защита от понижения или исчезновения напряжения (нулевая защита) выполняется с помощью одного или нескольких электромагнитных аппаратов, действует на отключение двигателя при перерыве питания или снижении напряжения сети ниже установленного значения и предохраняет двигатель от самопроизвольного включения после ликвидации перерыва питания или восстановления нормального напряжения сети. Специальная защита асинхронных электродвигателей от работы на двух фазах предохраняет двигатель от перегрева, а также от «опрокидывания», т. е. остановки под током вследствие снижения момента, развиваемого двигателем, при обрыве в одной из фаз главной цепи. Защита действует на отключение двигателя. В качестве аппаратов защиты применяются как тепловые, так и электромагнитные реле. В последнем случае защита может не иметь выдержки времени. Аппараты электрической защиты могут осуществлять один или сразу несколько видов защит. Так, некоторые автоматические выключатели обеспечивают защиту от коротких замыканий и от перегрузки. Одни из аппаратов защиты, например плавкие предохранители, являются аппаратами однократного действия и требуют замены или перезарядки после каждого срабатывания, другие, такие как электромагнитные и тепловые реле, — аппараты многократного действия. Последние различаются по способу возврата в состояние готовности на аппараты с самовозвратом и с ручным возвратом. Выбор и описание схемы
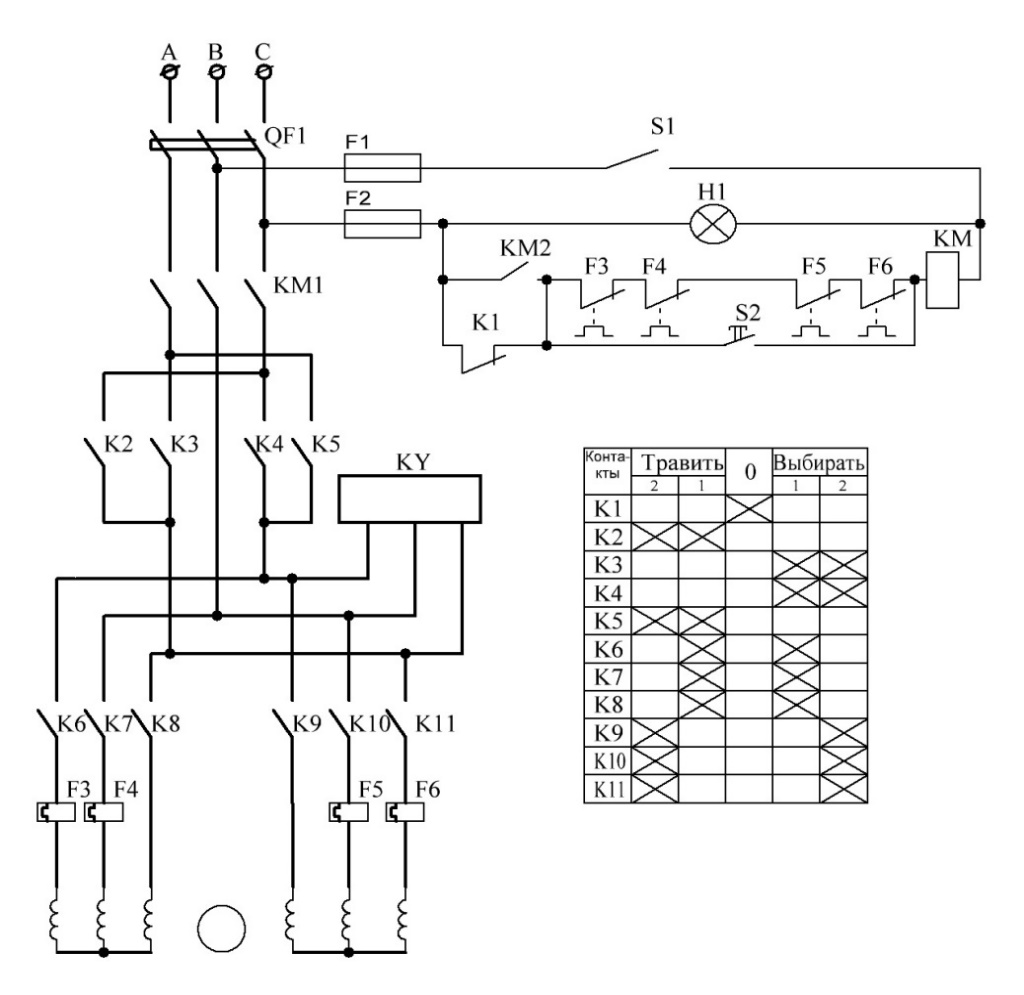
Рис. 3.3.1. Схема работы электропривода Работой электропривода управляют с помощью контроллера. При повороте пакетного выключателя S1 получает питание катушка линейного контактора KM, контактор замыкает главные контакты KM1 в цепи статора двигателя и вспомогательный контакт KM2, шунтирующий контакт K1 контроллера. Загорается сигнальная лампа H1. Схема подготовлена к пуску. При повороте рукоятки (маховика) контроллера в положение 1, например «Выбирать», размыкается контакт K1 и замыкаются контакты K2, K5, K6, K7 и K8 контроллера. Двигатель подключается к сети, начинает вращаться и выбирать якорь с малой скоростью. При переводе рукоятки (маховика) контроллера в положение 2 контакты K2 и K5 останутся замкнутыми, разомкнутся контакты K6, K7 и K8 и замкнутся K9, K10 и K11 контроллера. Произойдет переключение фаз обмотки статора со схемы малой частоты вращения на схему большой частоты вращения. Чтобы изменить направление вращения двигателя, рукоятку контроллера поворачивают в обратном направлении в положение 1 «Травить». В этом положении вместо контактов K2 и K5 замкнутся контакты K3 и K4. Произойдет переключение фаз, и направление вращения двигателя изменится. Скорости (число пар полюсов) переключаются в том же порядке: в положении 1 рукоятки контроллера замкнуты контакты K6, K7 и K8 и фазы обмоток статора включены по схеме малой частоты вращения; в положении 2 рукоятки контроллера замкнуты контакты K9, K10 и K11 и фазы обмотки статора включены по схеме большой частоты вращения. В схеме предусмотрена защита двигателя от перегрузки с помощью тепловых реле F3-F6. При необходимости работы электропривода в условиях перегрузки контакты тепловых реле шунтируются нажатием кнопки S2. Нулевая защита осуществляется линейным контактором KM, защита от токов короткого замыкания – автоматическим выключателем QF1. Предохранители F1, F2 защищают цепь управления от токов короткого замыкания. Схема предусматривает: · пуск, реверсирование и остановку двигателя · работу на малой и большой скорости (в положениях «Травить» и «Выбирать») · торможение – с помощью дискового электромагнитного тормоза KY
ЗАКЛЮЧЕНИЕ В курсовом проекте был произведен расчет электропривода якорно-швартового устройства судна. Были выбраны якоря, рассчитаны тяговые усилия и моменты на валу электродвигателя. Был выбран электродвигатель МАП421-4/8ОМ1 и произведена его проверка на продолжительность съема судна с якоря, на нагрев и максимальную скорость при отдаче якоря. Так же выбрана схема управления электроприводом якорно-швартового устройства судна. В ходе расчета все показатели получены в пределах указанных в регистре РФ. Конечная проверка двигателя на нагрев показала, что электропривод идеально подходит для данного якорно-швартового устройства. Цель курсового проекта достигнута.
СПИСОК ЛИТЕРАТУРЫ 1. Чекунов К.А. «Судовые электроприводы и электродвижение судов» -М., 1986. – 352 с. 2. Копылов И.П. «Электрические машины» -М., 2002. – 608 с. 3. Качман М. М. «Электрические машины и электропривод автоматических устройтсв» -М., - 157 с. 4. Ягодкин В.Я.. Электроприводы судовых грузоподъемных механизмов. СПб: ГМА им. Макарова, 2004 5. Фираго Б.И., Павлячик Л.Б.. Регулируемые электроприводы переменного тока. М.: Техноперспектива, 2006 6. Белов М.П., Новиков В.А., Рассудов Л.Н.. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов. М.: Академия, 2007 7. Москаленко В.В.. Системы автоматизированного управления электропривода. Издательство: Инфра-М, 2007 8. Белов М.П., Зементов О.И., Козярук А.Е.. Инжиниринг электроприводов и систем автоматизации. М.: Академия, 2006 9. Гульков Г.И., Петренко Ю.Н., Раткевич Е.П.. Системы автоматизированного управления электроприводами. Новое знание (Минск), 2007 10. Регистр России. Правила классификации и постройки морских судов Л., «Транспорт», 1990 г. 11. Судовые электроприводы. Справочник в 2 тт. под ред. Богословского А.П. Л., «Судостроение», 1983 г. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 555; Нарушение авторского права страницы
 м/с
м/с м/с
м/с м/с
м/с м/с
м/с м/с
м/с мин
мин с
с с – по условию
с – по условию мин
мин мин
мин м/с
м/с мин
мин
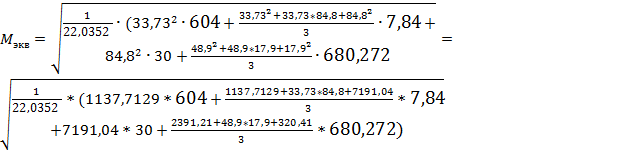 = 49 Н∙ м
= 49 Н∙ м Значит выбранный двигатель не будет перегреваться свыше допустимой температуры.
Значит выбранный двигатель не будет перегреваться свыше допустимой температуры.