|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Высотно-скоростные характеристики двигателя
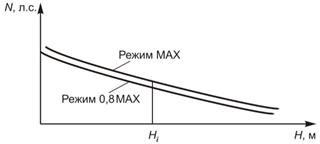
Высотной характеристикой двигателя называется зависимость эффективной мощности и эффективного удельного расхода топлива от высоты полета при постоянной частоте вращения вала двигателя. С подъемом на высоту изменяется температура и плотность окружающего воздуха. Это вызывает изменение мощности, развиваемой двигателем, и удельного расхода топлива. Уменьшение плотности воздуха приводит к уменьшению расхода воздуха и, соответственно, эффективной мощности. Мощность двигателя с увеличением высоты полета уменьшается (рис. 2.5), что влияет на ограничение высоты полета самолета, уменьшение вертикальной скорости набора (Vy) и угла набора (Q).
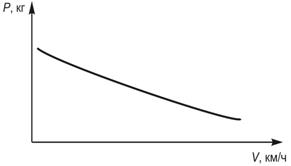
Рис. 2.5. Высотная характеристика Скоростной характеристикой двигателя называется зависимость силы тяги винта на данной высоте (Н = const) при данной частоте вращения (n = const) от скорости полета. С увеличением скорости полета углы атаки элементов лопасти винта уменьшаются, поэтому уменьшается сила тяги винта (рис. 2.6). Зависимость тяги винта от скорости полета можно определить по формуле
где h – КПД винта (h = Nт / Nпотр, Nт – тяговая мощность, Nпотр – мощность, потребная для вращения); Nе – мощность двигателя, используемая для вращения винта (эффективная); V – скорость полета.
Рис. 2.6. Скоростная характеристика двигателя Из формулы видно, что сила тяги обратно пропорциональна скорости. Чтобы не возникал волновой кризис (образование местных сверхзвуковых областей на концах лопастей при больших скоростях вращения винта), между двигателем и винтом установлен редуктор, понижающий частоту вращения (на DA 40NG редукционная передача винта 1:1,69). То есть винт вращается с меньшей скоростью, чем сам двигатель. Для равномерного вращения необходимо равенство Мкр = Мт. Если это условие будет нарушено, то вращение получится ускоренным или замедленным. Регулятор постоянства частоты вращения обеспечивает на заданном режиме постоянство частоты вращения (n = const). Работа лопасти винта в полете Винт самолета характеризуется следующими геометрическими параметрами: диаметром, профилем лопасти, радиусом сечения, формой лопасти в плане, углом установки, геометрическим шагом. Профиль лопасти аналогичен профилю крыла и характеризуется теми же параметрами. Силы, действующие на элемент лопасти при вращении винта, показаны на рис. 2.7.
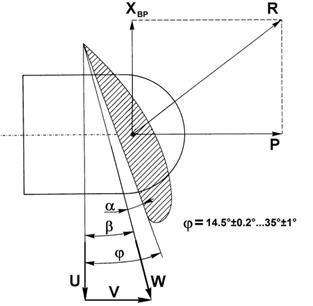
Рис. 2.7. Возникновение сил на лопасти воздушного винта При работе двигателя в полете все элементы лопасти совершают сложное движение, перемещаясь поступательно со скоростью V (в направлении полета) и по окружности в плоскости вращения винта с окружной скоростью U. Результирующая скорость элемента лопасти винта относительно воздуха представляет геометрическую сумму векторов V и U:
Окружная скорость элемента лопасти равняется U = 2p r n, где n – частота вращения; r – радиус лопасти. Контрольный радиус лопасти винта берется на расстоянии 0,75 м от оси вращения. Поступательная скорость всех элементов (V) равна воздушной (истинной) скорости полета самолета. Угол между результирующей скоростью элемента лопасти винта (W) и хордой профиля элемента лопасти винта называется углом атаки элемента лопасти a (см. рис. 2.7). Угол между результирующей скоростью элемента лопасти и плоскостью вращения винта называется углом притекания струи b. Угол установки лопасти j – это угол, заключенный между плоскостью вращения винта и хордой элемента лопасти. Тяга винта определяется по формуле
где Для обеспечения наивыгоднейших аэродинамических условий работы всех элементов лопасти винта угол наклона их делается переменным, т. е. лопасть имеет геометрическую крутку; наибольший угол наклона имеет сечения у корня, наименьший – на конце лопасти. Геометрический шаг винта – это расстояние, на которое продвинулся бы винт вдоль своей оси в твердой среде. Зная угол наклона и радиус сечения, легко определить геометрический шаг сечения: H = 2p r tgj, где r – радиус лопасти; j – угол установки лопасти. Винт mt-Propeller MTV-6-R/190-69 переменного шага. У винтов переменного шага геометрический шаг изменяется вдоль длины лопасти. Эти винты имеют больший КПД, так как все элементы винта работают с одним и тем же углом атаки. Кинематическими характеристиками воздушного винта называются параметры, характеризующие механическое движение винта: частота вращения, поступь, скольжение, относительная поступь (рис. 2.8). В полете каждое сечение лопасти, вращаясь вокруг продольной оси винта, одновременно продвигается вперед со скоростью полета самолета.
Рис. 2.8. Движение элемента лопасти винта: Шагом винта H называется расстояние, проходимое винтом поступательно за один полный оборот в жесткой среде (как если бы винт вращался в твердом теле): H = 2πrtgφ, где r – радиус лопасти, φ – угол установки лопасти. Поступью винта Н называется истинное расстояние, пройденное воздушным винтом поступательно за один полный оборот в воздухе или действительным шагом (так как возникает проскальзывание за счет малой плотности воздуха). Она может быть определена по формуле
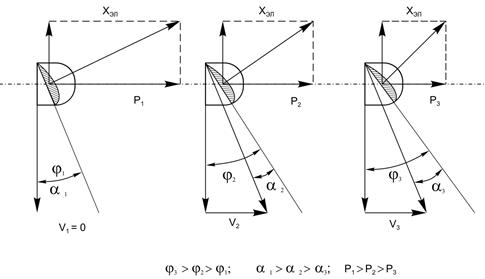
где V – скорость полета; n – частота вращения винта. Чем больше скорость при данной частоте вращения, тем больше поступь; чем больше частота вращения при данной скорости, тем меньше поступь; при скорости равной нулю, поступь винта равна нулю. Скольжением винта S называется разность между шагом и поступью: S = H – Hq. Режимы работы винта При обтекании лопасти потоком каждый элемент аналогично элементу крыла создает полную аэродинамическую силу, которую удобно разложить на составляющие – силу тяги (Рв) и силу сопротивления вращения (Хвр). Сила Хвр создает момент сопротивления вращению, на преодоление которого должен быть затрачен вращающий момент двигателя. Таким образом, сила Хвр является «вредной» (направлена против вращения), а сила Рв, идущая на преодоление лобового сопротивления самолета, – полезной. Рассмотрим характерные режимы работы элемента лопасти винта (рис. 2.9). 1. Режим работы на месте. При работе на месте V = 0, Н (поступь) = 0, тяга P максимальна, угол атаки a максимален и равен углу установки лопасти j. Сила тяги на элементе лопасти будет максимальной, так как угол атаки максимален.
1 2 3 4 5 6 Рис. 2.9. Режимы работы винта: 3. Режим нулевой тяги. При увеличении поступательной скорости V – скорости полета – уменьшается угол атаки элемента лопасти и полная аэродинамическая сила (она разворачивается к плоскости вращения, и ее составляющая Р уменьшается, становясь равной нулю). Элемент лопасти работает с небольшим отрицательным углом атаки (–0,5...–1°). 4. Режим отрицательной тяги (режим торможения). При дальнейшем увеличении поступательной скорости V угол атаки элемента лопасти еще более уменьшается. Полная аэродинамическая сила будет направлена в сторону, обратную полету, отрицательная тяга небольшая. Угол атаки отрицателен и сила тяги на элементе лопасти будет также отрицательной. 5. Режим авторотации. При увеличении скорости полета V полная аэродинамическая сила будет направлена против полета. Сила сопротивления вращению элемента лопасти в этом случае равна нулю. Винт мощность от двигателя не потребляет и не отдает, он вращается от воздушного потока. Угол атаки отрицательный и сила тяги также отрицательная. 6. Режим ветряка. При больших значениях скорости полета V и отрицательных углах атаки создается значительная отрицательная тяга, а сила сопротивления вращению элемента лопасти оказывается направленной в сторону вращения и, действуя в этом направлении, раскручивает вал двигателя. Этот режим возможен на пикировании. Все эти режимы винт проходит при отказе двигателя. Из пропеллерного режима винт уходит на режим ветряка и вращается в этом режиме. Поскольку на самолете DA 40NG один двигатель, и винт не флюгируется, то необходимо выдерживать наивыгоднейшую скорость планирования, при которой качество максимальное, произвести посадку на подобранную площадку или на ближайшем аэродроме. Таким образом, при увеличении скорости полета работа винта изменяется. При работе винта на месте, когда V = 0, угол атаки элемента лопасти равен углу установки. С увеличением поступательной скорости полета угол атаки элемента лопасти уменьшается. При постоянной скорости полета с увеличением частоты вращения угол атаки элемента лопасти винта увеличивается. Направление результирующей скорости набегающего потока зависит от соотношения скоростей V и U, от этого зависит и угол атаки элемента лопасти винта. Рассмотрим зависимость угла атаки элемента лопасти винта от изменения скорости полета (рис. 2.10) при постоянной частоте вращения двигателя.
Рис. 2.10. Работа винта при увеличении скорости полета В процессе разбега и взлета самолета угол установки лопасти винта увеличивается, угол атаки лопасти уменьшается, тяга винта становится меньше. 3. ХАРАКТЕРИСТИКИ ГОРИЗОНТАЛЬНОГО ПОЛЕТА |
Последнее изменение этой страницы: 2019-05-08; Просмотров: 492; Нарушение авторского права страницы
 ,
,


 – коэффициент тяги, зависящий от формы лопасти и углов атаки элементов лопасти (
– коэффициент тяги, зависящий от формы лопасти и углов атаки элементов лопасти (  ≈ 0,25); r – плотность воздуха; n – частота вращения винта; D – диаметр винта.
≈ 0,25); r – плотность воздуха; n – частота вращения винта; D – диаметр винта.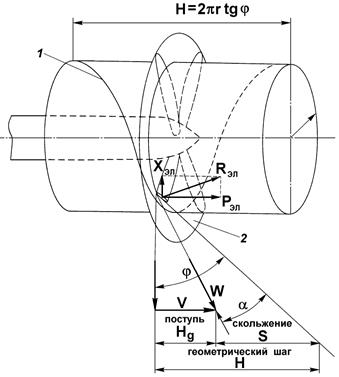

 2. Режим положительной тяги (пропеллерный). На данном режиме с увеличением поступательной скорости V (скорости полета) и относительной поступи уменьшается угол атаки элемента лопасти и сила тяги. Это основной рабочий режим элемента лопасти, при котором лопасть обтекается потоком с положительными углами атаки. Угол атаки положителен и сила тяги на элементе лопасти будет положительной.
2. Режим положительной тяги (пропеллерный). На данном режиме с увеличением поступательной скорости V (скорости полета) и относительной поступи уменьшается угол атаки элемента лопасти и сила тяги. Это основной рабочий режим элемента лопасти, при котором лопасть обтекается потоком с положительными углами атаки. Угол атаки положителен и сила тяги на элементе лопасти будет положительной.