
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение реакций в опорах вращающегося тела ⇐ ПредыдущаяСтр 2 из 2
Определим реакции в опоре вращающегося тела методом кинетостатики. Он заключается в решении задачи динамики средствами (уравнениями) статики. Для каждой точки механической системы справедливо основное уравнение динамики:
Здесь Основному уравнению динамики (4.1) можно придать вид уравнения статики:
Здесь
Рисунок 4.1. Определение реакций в опорах вращающегося тела Для заданной механической системы уравнение статики (4.2) имеет вид:
Для определения реакции шарнира нам необходимо и достаточно взять за координатные оси – неподвижные оси
Отсюда:
Подставив значения сил, получим:
Теперь спроецируем (4.2) на неподвижную ось
Отсюда:
Подставив известные значения сил, получим:
Полную реакцию в шарнире
Исследование движения механической системы с двумя степенями свободы с помощью уравнений Лагранжа II рода Составление уравнений движения системы методом Лагранжа
Уравнения второго рода являются одним из наиболее удобных приёмов составления уравнений движения механических систем. Они имеют следующий вид:
Здесь Уравнения (5.1.1) образуют систему Как видно из (5.1.1), для получения уравнений Лагранжа необходимо найти соответствующие производные от кинетической энергии системы и определить обобщённые силы. Определим кинетическую энергию системы. Она будет складываться из кинетических энергий треугольника и шарика:
Подставив значение
Кинетическая энергия шарика определяется его массой и относительной и переносной скоростями:
С учётом известных значений скоростей, получим:
Кинетическая энергия системы равна:
Найдём производные от кинетической энергии согласно (5.1.1):
Рисунок 5.1.1. Определение кинетической и потенциальной энергий системы
Теперь, исходя из (5.1.1), нужно определить обобщённые силы. Данная механическая система является консервативной, мы можем определить обобщённые силы через потенциальную энергию по формуле:
Найдём потенциальную энергию. Она будет складываться из работ консервативных сил по перемещению тела из нулевого положения:
Потенциальная энергия системы равна:
Найдём обобщённые силы:
Теперь можем записать систему уравнений Лагранжа II рода:
Получение дифференциального уравнение относительного движения материальной точки (5.1.13) и (5.1.14) – это система уравнений Лагранжа II рода; первое из них представляет собой дифференциальное уравнение относительного движения. При сравнении (5.1.13) с уравнением относительного движения (2.7) видно, что уравнения тождественны:
Определение закона изменения внешнего момента, обеспечивающего постоянство угловой скорости
(5.1.14) – это уравнение уравнения движения твердого тела без ограничения на закон изменения угловой скорости вращения. Определим величину внешнего момента, обеспечивающего равномерное вращение:
При действии внешнего момента, обеспечивающего равномерное вращение, уравнение (5.1.14) примет вид:
Отсюда:
Сравним с полученным ранее значением:
Итак, два разных способа определения внешнего момента дали один результат. |
Последнее изменение этой страницы: 2019-10-04; Просмотров: 194; Нарушение авторского права страницы
 (4.1)
(4.1) и
и  – масса и ускорение некоторой точки системы;
– масса и ускорение некоторой точки системы;  – сумма всех активных сил и реакций связей, приложенных к ней.
– сумма всех активных сил и реакций связей, приложенных к ней. (4.2)
(4.2) – сила инерции точки механической системы.
– сила инерции точки механической системы.
 (4.3)
(4.3) и
и  , и определить составляющие реакции шарнира на эти оси:
, и определить составляющие реакции шарнира на эти оси: 
 (4.4)
(4.4)
 (4.5)
(4.5)
 (4.6)
(4.6)
 (4.7)
(4.7) можно найти по формуле:
можно найти по формуле:  , где
, где  и
и  определяются выражениями (4.5) и (4.7); график её зависимости от времени приведён в приложении к курсовой работе (рис. 4).
определяются выражениями (4.5) и (4.7); график её зависимости от времени приведён в приложении к курсовой работе (рис. 4).
 (5.1.1)
(5.1.1) – кинетическая энергия системы;
– кинетическая энергия системы;  ,
,  ,
,  , – обобщённые координаты, скорости и силы соответственно;
, – обобщённые координаты, скорости и силы соответственно;  – число степеней свободы.
– число степеней свободы. , а порядок данной системы равен
, а порядок данной системы равен  . Форма уравнений Лагранжа не зависит от выбора обобщённых координат
. Форма уравнений Лагранжа не зависит от выбора обобщённых координат  . В связи с этим говорят, что уравнения Лагранжа второго рода обладают свойством инвариантности.
. В связи с этим говорят, что уравнения Лагранжа второго рода обладают свойством инвариантности. .
.
 из (3.1.5), получим:
из (3.1.5), получим:  (5.1.2)
(5.1.2)
 (5.1.3)
(5.1.3) (5.1.4)
(5.1.4)
 (5.1.5)
(5.1.5)  (5.1.6)
(5.1.6)
 (5.1.7)
(5.1.7)  (5.1.8)
(5.1.8)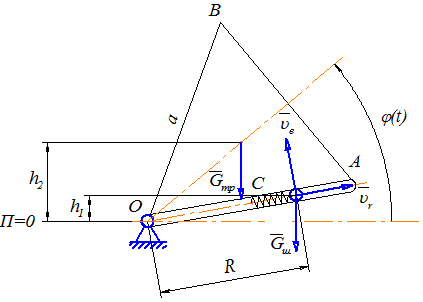
 (5.1.9)
(5.1.9) . За нулевой уровень потенциальной энергии выберем начальный момент времени, при
. За нулевой уровень потенциальной энергии выберем начальный момент времени, при  :
:  – энергия положения шарика;
– энергия положения шарика; 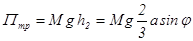 – энергия положения прямоугольника;
– энергия положения прямоугольника;  – потенциальная энергия силы упругости;
– потенциальная энергия силы упругости;  (5.1.10)
(5.1.10) (5.1.11)
(5.1.11) (5.1.12)
(5.1.12) (5.1.13)
(5.1.13) (5.1.14)
(5.1.14) (2.7)
(2.7) (5.1.14)
(5.1.14)

 (5.3.1)
(5.3.1) (5.2.2)
(5.2.2) (3.2.2)
(3.2.2)