
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Механические и электромагнитные характеристики вентильной машины ⇐ ПредыдущаяСтр 3 из 3
В установившемся режиме при такой установке ДПР, чтобы обеспечить Токи в осях
Ток, потребляемый машиной
Если не учитывать постоянную фильтра
При Уменьшение скорости холостого хода с одновременным ростом тока холостого хода из-за наличия постоянных Для устранения этой нелинейности следует осуществлять управление с обратной связью по току и поддержанием
Электропривод с вентильной машиной
При синтезе регулятора в электроприводе с вентильной машиной внутренний контур тока с постоянными Модель электропривода, в которой использована математическая модель вентильной машины (рис. 10) показана на рис. 18. Результаты моделирования при использовании в электроприводе двигателей ДБМ150-4-1, 5-2 и ДБМ185-6-0, 2-2 приведены на рис. 19 и 20.
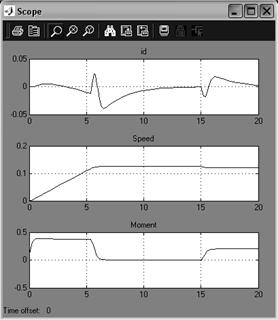
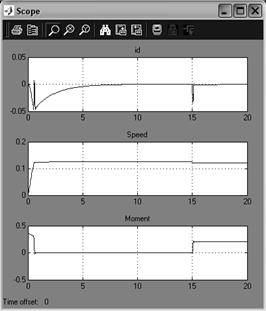
Рис. 18. Модель электропривода с вентильной машиной. Рис. 19. Переходные процессы в электроприводе при использовании двигателя ДБМ150-4-1, 5-2.
Рис. 20. Переходные процессы в электроприводе при использовании двигателя ДБМ185-6-0, 2-2.
В модели, рассмотренной выше регуляторы тока реализованы во вращающейся системе координат. При этом обратная связь охватывает оба инерционные звена с постоянными времени Регулятор PID 2 представляет собой пропорционально-интегральный регулятор с передаточной функцией
Таким образом, получаем передаточную функцию разомкнутого контура по току
Соответственно, после замыкания получаем апериодическое звено с постоянной времени
Регулятор PID 3 также представляет собой пропорционально-интегральный регулятор с передаточной функцией
Аналогично предыдущему случаю, получаем передаточную функцию разомкнутого контура по току
Соответственно, после замыкания получаем апериодическое звено с постоянной времени
Модель электропривода с вентильной машиной, выполненная с использованием виртуальных блоков из библиотеки Power System Blockset представлена на рис. 21.
Рис. 21. Модель электропривода с вентильной машиной. Блоки, относящиеся к системе управления: преобразователь вращающихся координат
Рис. 22. Окно настройки магнитоэлектрического синхронного двигателя.
Датчик положения ротора реализован в преобразователе координат, на вход Teta которого подаётся угол поворота ротора, умноженный на число пар полюсов плюс начальный угол установки, равный 90 электрических градусов. Таким образом, смонтирована установка ДПР, в которой Приложение 1
Паспортные данные двигателей ДБМ150-4-1, 5-2 и ДБМ185-6-0, 2-2
Приложение 2
|
Последнее изменение этой страницы: 2019-10-04; Просмотров: 155; Нарушение авторского права страницы
 из уравнений (12) и (13) определяют установившиеся токи и момент:
из уравнений (12) и (13) определяют установившиеся токи и момент:  ,
, 
 (14)
(14) (15)
(15) (16)
(16) , то из уравнений (13) – (15) получаются уравнения классической вентильной машины.
, то из уравнений (13) – (15) получаются уравнения классической вентильной машины. ,
,  (17)
(17) характеристики вентильной машины становятся аналогичными машине постоянного тока.
характеристики вентильной машины становятся аналогичными машине постоянного тока. и
и  .
. . При построении электропривода на базе вентильной машины одним из основных требований является наличие замкнутых контуров регулирования токов
. При построении электропривода на базе вентильной машины одним из основных требований является наличие замкнутых контуров регулирования токов  ,
,  . Это позволяет поддерживать в переходных и установившихся режимах
. Это позволяет поддерживать в переходных и установившихся режимах 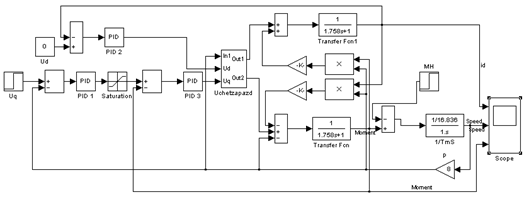
 и
и  . Существует иной вариант построения контура тока, когда обратная связь осуществляется в неподвижной системе координат. При этом в системе автономный инвертор-машина реализуется «токовый коридор», а инерционное звено с постоянной времени
. Существует иной вариант построения контура тока, когда обратная связь осуществляется в неподвижной системе координат. При этом в системе автономный инвертор-машина реализуется «токовый коридор», а инерционное звено с постоянной времени  не охватывается отрицательной обратной связью по току. В итоге в канале регулирования скорости остаются апериодическое звено с постоянной
не охватывается отрицательной обратной связью по току. В итоге в канале регулирования скорости остаются апериодическое звено с постоянной  . При синтезе скоростного контура на оптимум по модулю передаточная функция регулятора соответствует пропорциональному звену с коэффициентом усиления
. При синтезе скоростного контура на оптимум по модулю передаточная функция регулятора соответствует пропорциональному звену с коэффициентом усиления  .
.






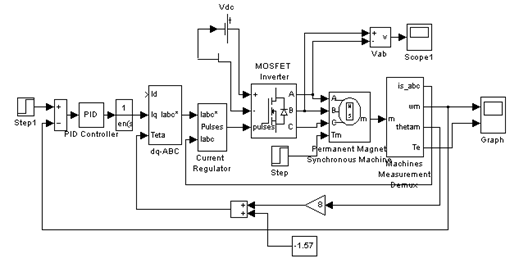
 в неподвижные А, В, С (блок dq – А, В, С), гистерезисный регулятор тока (блок Current Regulator). Трехфазный автономный инвертор здесь реализован на MOSFET транзисторах, окно настройки магнитоэлектрического синхронного двигателя показано на рис. 22. в качестве двигателя взят ДБМ150-4-1, 5-2.
в неподвижные А, В, С (блок dq – А, В, С), гистерезисный регулятор тока (блок Current Regulator). Трехфазный автономный инвертор здесь реализован на MOSFET транзисторах, окно настройки магнитоэлектрического синхронного двигателя показано на рис. 22. в качестве двигателя взят ДБМ150-4-1, 5-2.
 .
.