
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение структуры и параметров объекта управленияСтр 1 из 3Следующая ⇒
Введение
Современный электропривод состоит из большого числа разнообразных деталей, машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Наиболее важным элементом является система управления электроприводом (СУЭП). От правильного функционирования системы управления зависит состояние объекта управления и правильности отработки заданных параметров. В настоящее время СУЭП решает несколько важных задач: Формирование статических механических характеристик электропривода с целью стабилизации скорости (или момента), расширение диапазона регулирования скорости, ограничение перегрузок, формирование адаптивных систем. Оптимизация переходных режимов с целью повышения быстродействия, снижения динамической ошибки, ограничение ускорения, рывков и т.д. Целью данного курсового проекта является разработка системы непрерывного управления скоростью рабочего органа в режиме слежения в заданном диапазоне. Также необходимо разработать принципиальную схему, с выбором ее элементов, и предложить вариант реализации блока управления. Определение структуры и параметров объекта управления
Выбор структуры объекта управления
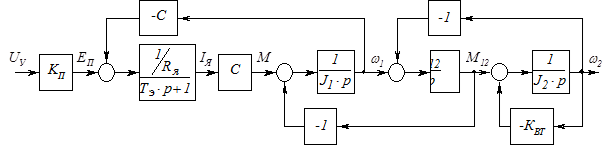
В качестве структуры объекта управления выбираем эквивалентную двухмассовую систему электропривода (Рис. 1). Структура объекта управления.
Рис. 1
Определение параметров объекта управления
В состав объекта управления входят: широтно-импульсный преобразователь; двигатель постоянного тока ДПУ240-1100-3, технические данные которого приведены в Табл. 1.
Табл. 1. Технические данные двигателя ДПУ240 - 1100 - 3.
Двигатели серии ДПУ предназначены для электроприводов постоянного тока металлорежущих станков с ЧПУ и промышленных роботов. Электродвигатели длительно выдерживают номинальный момент при частоте вращения от 0.1 до 5000 об/мин. Двигатели выпускаются со встроенными тахогенераторами постоянного тока типа ТП80-20-0.2 (основные технические данные тахогенератора приведены в Табл. 2).
Табл. 2. Технические данные тахогенератора ТП80 - 20 - 0.2.
Определение параметров: номинальная частота вращения:
максимальная частота вращения в заданном диапазоне слежения:
максимальная ошибка слежения:
постоянная двигателя:
электромагнитная постоянная времени двигателя:
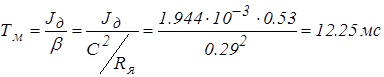
электромеханическая постоянная времени двигателя:
соотношение постоянных времени двигателя:
напряжение двигателя, соответствующее максимальной частоте вращение в заданном диапазоне слежения:
принимая, что максимальной скорости диапазона слежения будет соответствовать максимальное задание на скорость, равное
Далее определяем параметры механической части: момент инерции рабочего органа:
период и частота упругих колебаний:
коэффициент жесткости упругой передачи:
коэффициент вязкого трения:
механическая постоянная времени рабочего органа:
Разработка алгоритма управления и расчет параметров элементов структурной схемы
Обратная связь по скорости.
Рис. 9
Выбираем конденсатор С2=1мкФ, находим
Выбираем R25=24 кОм, R5=2.2 кОм.
Выбираем R35=500 кОм. Для обеспечения устойчивости последовательно конденсатору С2 включим демпфирующий резистор R2 номиналом:
Принимаем
С2 - К73-17-63В-1мкФ, R25 - С2-29-0.125-24Ом, R5 - С2-29-0.125-2.2кОм, R35 - С2-29-0.5-500кОм.
Аналогично выбираем элементы для реализации обратных связей по скорости другой массы. Реализация дополнительного задания по производной скорости.
Рис. 10
Принимая Т0=0.02 с и С1=1 мкФ, находим
Для обеспечения устойчивости последовательно С1 включаем R1 номиналом 100 Ом. Выбираем С1 - К73-17-63В-1мкФ, R1 - С2-29-0.125-100Ом, R16 - С2-29-0.125-20кОм. Резисторы. В схеме системы управления присутствуют следующие типы резисторов:
Конденсаторы.
Микросхемы. В системе управления также присутствуют два типа микросхем: операционный усилитель КР140УД17А и аналоговый перемножитель КР525ПС2А.
Суммарная площадь, занимаемая элементами, примерно равна 8000 мм2. Принимая коэффициент, учитывающий " разводку" платы, равным Кразв=0.4, находим площадь поверхности платы Напряжение питания схем, сигналы с датчиков, выходные сигналы регуляторов подаются и снимаются со схемы посредством разъема типа СНО51-30/59*9Р-2. Для уменьшения токов утечки по поверхностям платы ее необходимо покрыть с двух сторон лаком, например типа К-47. Заключение
В данном курсовом проекте разработана система управления скоростью электропривода с двигателем постоянного тока. В качестве модели была выбрана эквивалентная структура двухмассовой системы с упругой связью двигателя и рабочего органа. Настройку системы производили с помощью модального регулятора с распределением корней характеристического уравнения по фильтру Баттерворта 4-го порядка. Также в данном проекте произведены расчет и выбор всех элементов, реализующих данную систему. По полученным результатам мы составили принципиальную электрическую схему, и предложили один из вариантов расположения элементов на печатной плате. Список литературы
1. " Справочник по электрическим машинам" под ред. И.П. Копылова. 2. А.В. Башарин " Управление электроприводами", Ленинград 1982 г. 3. А.В. Башарин " Примеры расчета автоматизированного электропривода на ЭВМ", Ленинград 1990 г. 4. В.И. Ключев " Теория электропривода", Москва 1985 г. 5. " Справочник по автоматизированному электроприводу" под ред. 6. В.А. Елисеева, Москва 1983 г. 7. " Справочник разработчика и конструктора РЭА. Элементная база" под ред. М.Ю. Масколенкова, Москва 1996 г. Задание № 16
Студенту Сидорову А.А. на курсовой проект по СУЭП на тему: " Разработка системы непрерывного управления координатами электропривода с заданными показателями качества". Исходные данные. Основная координата - скорость. Режим управления - слежение в диапазоне ± (0…0.6) × wном. Нагрузка - вязкое трение 1-го рода, Мс (wном) =0.8× Мном. Характеристика силового канала. Электродвигатель - ДПУ240-1100-3. Преобразователь - мостовой ШИП с несимметричной коммутацией на частоте 10 кГц. Механическая часть - упругая, g=2, Fу=5 Гц. Основные требования: ½ Dw½ £ 0.02× wном при гармоническом задании в полосе частот 0…5 Гц. Содержание проекта. Определение структуры и параметров объекта управления. Разработка алгоритма управления и расчет параметров элементов структурной схемы. Расчет статических и динамических характеристик. Разработка принципиальной схемы и программного обеспечения системы, выбор ее элементов. Разработка конструкции блока управления. Содержание графического материала. Принципиальная электрическая схема системы. Чертеж общего вида блока управления. Схема модели и диаграммы, отражающие показатели качества.
Введение
Современный электропривод состоит из большого числа разнообразных деталей, машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Наиболее важным элементом является система управления электроприводом (СУЭП). От правильного функционирования системы управления зависит состояние объекта управления и правильности отработки заданных параметров. В настоящее время СУЭП решает несколько важных задач: Формирование статических механических характеристик электропривода с целью стабилизации скорости (или момента), расширение диапазона регулирования скорости, ограничение перегрузок, формирование адаптивных систем. Оптимизация переходных режимов с целью повышения быстродействия, снижения динамической ошибки, ограничение ускорения, рывков и т.д. Целью данного курсового проекта является разработка системы непрерывного управления скоростью рабочего органа в режиме слежения в заданном диапазоне. Также необходимо разработать принципиальную схему, с выбором ее элементов, и предложить вариант реализации блока управления. Определение структуры и параметров объекта управления
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-10-04; Просмотров: 181; Нарушение авторского права страницы
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  , следовательно, можно принять, что
, следовательно, можно принять, что  ;
;  ;
;  , находим коэффициент передачи преобразователя (представив преобразователь безинерционным звеном, т.к пренебрегаем дискретностью ШИП из-за высокой частоты коммутации ключей:
, находим коэффициент передачи преобразователя (представив преобразователь безинерционным звеном, т.к пренебрегаем дискретностью ШИП из-за высокой частоты коммутации ключей:  ):
):  .
. ;
;  ,
,  ;
;  ;
;  ;
;  .
.
 .
. .
. .
.
 .
.



 . После приблизительного размещения находим, что длина печатной платы составляет 200 мм. Из стандартного ряда выбираем ширину платы - 120 мм.
. После приблизительного размещения находим, что длина печатной платы составляет 200 мм. Из стандартного ряда выбираем ширину платы - 120 мм.