
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчет параметров элементов структурной схемы
Рассмотрим в качестве объекта управления систему электропривода (Рис. 1). Этой структурной схеме соответствуют следующие дифференциальные уравнения:
В установившемся режиме работы
(р=0):
Для замкнутой через модальный регулятор системы:
В данном случае:
За вектор переменных состояния выбираем вектор:
Тогда
Учитывая, что
В общем виде
Нормируя
вводим базовую частоту
Получим
Выбираем
Задаваясь временем регулирования определяем базовую частоту
Далее находим матрицу К коэффициентов обратных связей по переменным состояния
Проведя эксперимент, с помощью пакета MATLAB уточним значения коэффициентов обратных связей, подобрав следующие значения:
Расчет статических и динамических характеристик
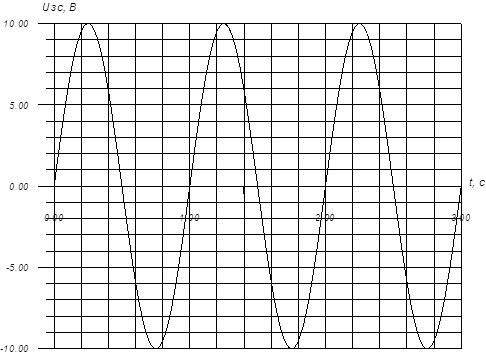
Расчет характеристик произведем с помощью пакета MATLAB 5. Модель MATLAB представлена на Рис. 2. Ниже приведены результаты моделирования в виде графиков. Поведение системы при гармоническом задании, частота 1 Гц амплитуда 10 В (188.5 рад/с).
а) Задание скорости
б) Отработка задания
в) Изменение ошибки Рис. 3
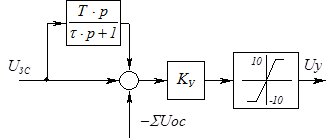
Как видно из приведенных выше графиков ошибка между заданием на скорость и отработкой задания недопустимо велика и, кроме того, между заданием скорости и отработкой задания есть еще и фазовый сдвиг. Для уменьшения ошибки слежения и исключения фазового сдвига скорректируем систему, введя дополнительное задание по производной скорости как показано на Рис. 4.
Рис. 4
Проведя ряд экспериментов, установим также, что постоянная времени Т имеет линейную зависимость от частоты гармонического задания скорости. Вид этой зависимости представлен на Рис. 5 ниже. График зависимости постоянной времени Т от частоты гармонического задания скорости.
Рис. 5
Далее приведены результаты моделирования уже скорректированной системы. Из этих графиков видно, что требования, указанные в задании на проект выполняются. Поведение системы при гармоническом задании, частота 1 Гц амплитуда 10 В (188.5 рад/с).
а) Задание скорости
б) Отработка задания
в) Изменение ошибки
г) Скорость двигателя
д) Ток двигателя
е) Упругий момент Рис. 6 Поведение системы при гармоническом задании, частота 5 Гц амплитуда 4 В (75.4 рад/с).
а) Задание скорости
б) Отработка задания
в) Изменение ошибки
г) Скорость двигателя
д) Ток двигателя
е) Упругий момент Рис. 7 Разработка принципиальной схемы и программного обеспечения системы, выбор ее элементов
Выбираем прецизионные операционные усилители DA1…DA9 серии КР540УД17А с параметрами: Uпит=±15 В, Iпотр=5 мА, напряжение смещения Uсм=0.03 мВ. Для аналогового перемножителя берем микросхему КР525ПС2А. Для предотвращения обратной связи по питанию для всех микросхем применяем блокировочные конденсаторы С6…С25 серии К10-17-25В-0.1мкФ. Для синтеза обратных связей по скоростям 1-ой и 2-ой массы применим тахогенераторы ТП80-20-0.2. Для согласования выходного напряжения тахогенератора с системой управления применим делитель, представленный на Рис. 8.
Рис. 8
Примем R17=10 кОм, тогда
Выбираем R17 - С2-29-0.125-10кОм, R27 - С2-29-0.125-26кОм. Обратная связь по скорости.
Рис. 9
Выбираем конденсатор С2=1мкФ, находим
Выбираем R25=24 кОм, R5=2.2 кОм.
Выбираем R35=500 кОм. Для обеспечения устойчивости последовательно конденсатору С2 включим демпфирующий резистор R2 номиналом:
Принимаем
С2 - К73-17-63В-1мкФ, R25 - С2-29-0.125-24Ом, R5 - С2-29-0.125-2.2кОм, R35 - С2-29-0.5-500кОм.
Аналогично выбираем элементы для реализации обратных связей по скорости другой массы. Реализация дополнительного задания по производной скорости.
Рис. 10
Принимая Т0=0.02 с и С1=1 мкФ, находим
Для обеспечения устойчивости последовательно С1 включаем R1 номиналом 100 Ом. Выбираем С1 - К73-17-63В-1мкФ, R1 - С2-29-0.125-100Ом, R16 - С2-29-0.125-20кОм. Реализация устройства модуля входного сигнала.
Рис. 11
Выбираем R11=R12=R13=10 кОм, тогда R23=R24=20 кОм. Принимаем R11, R12, R13 - С2-29-0.125-10кОм, R23, R24 - С2-29-0.125-20кОм. |
Последнее изменение этой страницы: 2019-10-04; Просмотров: 127; Нарушение авторского права страницы

 ,
,  ,
,  .
. .
.
 ,
,  ,
, 

 .
.
 ,
,  ,
, 


 ,
,  , относительный оператор
, относительный оператор  .
. .
. согласно стандартной форме Баттерворта 4-го порядка
согласно стандартной форме Баттерворта 4-го порядка .
. .
.


 ,
,  ,
,  .
.
















 .
.
 .
. .
. .
.
 .
.