|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчетные схемы механической части электроприводаСтр 1 из 6Следующая ⇒
Механическая часть электромеханической системы (см. рис.1.2) включает в себя все связанные движущиеся массы: двигателя, передаточного устройства и исполнительного механизма машины. К ротору двигателя при скорости w приложен электромагнитный момент М, под действием которого механическая часть приводится в движение и на рабочем органе машины совершается предусмотренная технологией механическая работа. Непосредственное представление о движущихся массах установки и механических связях между ними дает кинематическая схема электропривода.
Конкретные кинематические схемы отличаются многообразием, однако обладают и общими свойствами, которые можно установить с помощью кинематической схемы электропривода, представленной на рис.1.1, а. Здесь двигатель через соединительную муфту СМ1, клиноременную передачу КРП, ряд зубчатых передач ЗП1... ЗПj и соединительную муфту СМ2 приводит во вращение барабан Б, преобразующий вращательное движение в поступательное перемещение ряда связанных масс. В данной примерной схеме предполагается, что рабочим органом механизма является грузозахватывающее устройство, перемещающее груз Гр, имеющий массу mгр, движущийся со скоростью Vгр и подверженный воздействию силы тяжести Р. Рассмотренная схема наглядно отражает то положение, что в общем случае механическая часть электропривода представляет собой систему связанных масс, движущихся с различными скоростями вращательно или поступательно. При нагружении элементы системы (валы, опоры, клиноременные передачи, зубчатые зацепления, канаты и т. п. ) деформируются, так как механические связи не являются абсолютно жесткими. При изменениях нагрузки массы имеют возможность взаимного перемещения, которое при данном приращении нагрузки определяется жесткостью связи. При составлении данной кинематической схемы принято, что механическая часть привода содержит n вращательно движущихся сосредоточенных масс и k поступательно, причем механическая инерция элементов, связывающих эти массы, не учитывается. Каждый вращательно движущийся элемент обладает моментом инерции J, и связан с (i + 1)-м элементом механической связью, обладающей жесткостью сi Соответственно каждый поступательно движущийся элемент имеет массу тj и связан со следующим механической связью с жесткостью сj. В пределах деформаций упругих механических связей, для которых выполняется закон Гука, их жесткости можно определить с помощью соотношений:
где Мyi и Fyj - нагрузка упругой механической связи; Dfi=fi-fi+1 и DSj=Sj-Sj+1 - деформация упругого элемента при вращательном и поступательном движениях; (f и S - перемещения (пути) соответственно вращательно и поступательно движущихся элементов. Массы элементов и жесткости элементарных связей в кинематической цепи привода различны. Определяющее влияние на движение системы оказывают наибольшие массы и наименьшие жесткости связей. Поэтому одной из первых задач проектирования и исследования электроприводов является составление упрощенных расчетных схем механической части, учитывающих возможность пренебрежения упругостью достаточно жестких механических связей и приближенного учета влияния малых движущихся масс. При этом следует учитывать, что в связи с наличием передач различные элементы системы движутся с разными скоростями, поэтому непосредственно сопоставлять их моменты инерции Ji, массы mj, жесткости связей ci и сj, деформации Dfi и DSj, перемещения fi и Sj и т. п. невозможно. Как следствие, для составления расчетных схем механической части электропривода необходимо приведение всех параметров элементов кинематической цепи к одной расчетной скорости. Обычно наибольшее удобство представляет приведение их к скорости двигателя, поэтому оно используется во всем последующем изложении. Однако следует иметь в виду возможность приведения к скорости любого элемента. В частности, при решении ряда задач оказывается полезным приведение к скорости
механизма, особенно при поступательном движении его органа.
Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии. При приведении необходимо обеспечить сохранение запаса кинетической и потенциальной энергии системы, а также элементарной работы всех действующих в системе сил и моментов на возможных перемещениях. Соответственно при приведении момента инерции элемента системы, движущегося вращательно со скоростью wi или массы, поступательно движущейся со скоростью v к расчетной скорости wi должны выполняться условия Откуда получаем формулы приведения
где i1i=w1/wi - передаточное число от вала приведения до i-го вала; p1j=vi/w1 - радиус приведения к валу со скоростью w1. При приведении вращательных fi и поступательных Sj перемещений необходимо учитывать, что передаточное число и радиус приведения определяются соотношением скоростей. Исходя из этого, в общем случае перемещения в системе связаны так:
При линейных кинематических связях i1i=const и r1j=const. В этом случае формулы приведения перемещений имеют вид
При приведении жесткостей механических связей должно выполняться условие равенства запаса потенциальной энергии деформации упругих элементов. Соответственно
Откуда получим формулы приведения
Приведение моментов и сил нагрузки элементов кинематической цепи должно осуществляться на основании условия равенства элементарной работы на возможных перемещениях:
Следовательно,
При проектировании и исследовании электроприводов моменты инерции, массы, жесткости связей реальных элементов обычно бывают известны, а действующие в системе силы либо заданы, либо рассчитываются по исходным данным механизма и условиям его технологии. После приведения их значений к расчетной скорости представляется возможным, сопоставив приведенные значения моментов инерции и жесткостей, осуществить выбор главных масс и главных упругих связей и на этой основе составить приближенную расчетную схему механической части. Для большей наглядности сопоставления по результатам приведения можно построить исходную приведенную расчетную схему, представив в ней массы в виде прямоугольников, площадь которых пропорциональна приведенным моментам инерции, а жесткости связей между ними в виде соединений, длина которых обратно пропорциональна жесткости (прямо пропорциональна податливости связей). Для кинематической схемы на рис.1.1, а приведенная расчетная схема может иметь вид, показанный на рис.1.1, б. Для примера в ней выделены три наиболее значительные массы - ротор двигателя с моментом инерции J1 барабан с приведенным моментом инерции Jпр.n и груз Jпр.k. Рассматривая эту схему, можно видеть, что вследствие малости остальных моментов инерции ее можно существенно упростить. Для этого следует малые массы добавить к близлежащим большим, а затем определить эквивалентные жесткости связей между полученными массами по общей формуле:
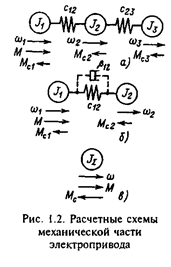
На исходной расчетной схеме (рис 1.1, б) стрелками показаны приложенные к отдельным массам системы приведенные моменты действующих в системе внешних сил Мпр.i и Mnp.j. К ротору двигателя J1 приложен электромагнитный момент двигателя M и момент механических потерь DM, причем для правильного учета знака действующих моментов указано положительное для всей приведенной схемы направление скорости w1. При переходе к упрощенной расчетной схеме необходимо просуммировать все внешние приложенные к массам силы, связи между которыми принимаются жесткими. Исследования динамики электроприводов показывают, что неразветвленные расчетные механические схемы в большинстве практических случаев в результате выделения главных масс и жесткостей сводятся к трехмассовой (рис.1.2, а), двухмассовой (рис.1.2, б) расчетным схемам и к жесткому приведенному механическому звену (рис.1.2, в). Параметрами обобщенной трехмассовой упругой механической системы (расчетной схемы на рис.1.2, а) являются суммарные приведенные моменты инерции масс J1, J2 и J3, образованные приведенными массами, связи между которыми приняты жесткими, и эквивалентные приведенные жесткости механических упругих связей между J1 и J2-c12 и между J2 и J3-c23 первая масса представляет собой ротор двигателя и жестко с ним связанные элементы; к этой массе приложены электромагнитный момент двигателя М и момент статической нагрузки Мс1, который обычно является суммарным моментом потерь на валу двигателя и в жестко с ним связанных элементах. К промежуточной массе механизма J2 приложен момент сопротивления MC2, а к третьей J3 - момент внешней нагрузки этой массы MC3. Трехмассовая упругая система при исследовании электромеханических систем автоматизированного электропривода используется в тех случаях, когда возникает необходимость более детального анализа условий движения масс механизма. Для решения задачи при этом обычно используется математическое моделирование на аналоговых или цифровых вычислительных машинах. Для исследования отдельных физических особенностей трехмассовая расчетная схема сводится к двухмассовой. В обобщенной двухмассовой упругой системе (рис.1.2, б) суммарный приведенный момент инерции элементов, жестко связанных с двигателем, аналогично предыдущему обозначен J1. Суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма, обозначен J2. Безынерционная упругая связь между этими массами характеризуется приведенной эквивалентной жесткостью с12. Суммарные моменты нагрузок на валу двигателя и механизма обозначены соответственно Mс1 и Mс2. Электромеханическая система с двухмассовой упругой механической частью представляет собой простейшую модель электропривода, наиболее удобную для изучения влияния упругих механических связей, поэтому в данном курсе является основным объектом изучения. Когда параметры системы таковы, что влияние упругих связей незначительно, или при решении задач, в которых с этим влиянием можно не считаться, механическая часть представляется простейшей расчетной схемой, не учитывающей влияния упругих связей, -жестким приведенным звеном (рис.1.2, в). В этих случаях многомассовая механическая часть электропривода заменяется одной эквивалентной массой с моментом инерции JS, на которую воздействуют электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент нагрузки Mс. Момент нагрузки Мс включает в себя все внешние силы, приложенные к механической системе, кроме момента двигателя M. При приведении к валу двигателя (w1=wдв) суммарный приведенный момент инерции электропривода JS может быть выражен общей формулой
где п и k - число масс установки, совершающих соответственно вращательное и поступательное движение. Суммарный приведенный к валу двигателя момент статической нагрузки Мс можно в общем виде записать так:
где q, p - число внешних моментов Mс и сил Fj приложенных к системе, кроме электромагнитного момента двигателя. В заключение отметим, что на практике встречаются разветвленные кинематические схемы, которые приводят к разветвленным расчетным схемам механической части Характерным примером являются кинематические схемы многодвигательных электроприводов, в которых двигатели через индивидуальные редукторы воздействуют на общий механизм. |
Последнее изменение этой страницы: 2019-10-04; Просмотров: 230; Нарушение авторского права страницы

 ,
,