
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ ОМД И ЧИСЛЕННЫЕ МЕТОДЫСтр 1 из 3Следующая ⇒
Введение Специалист по ОМД (технолог, конструктор, инженер-исследователь) в практической деятельности решает задачи, которые в основном можно свести к трем перечисленным ниже направлениям [1, 6]. 1. Расчет напряжений и энергосиловых параметров (расчет напряжений на поверхности инструмента и внутри заготовки; расчет силы, которую должна развить технологическая машина для обработки заготовки; расчет работы, которую необходимо затратить для обработки заготовки). 2. Расчет формоизменения (расчет деформаций и перемещений частиц металла, определение размеров и формы исходной заготовки; расчет количества технологических операций, определение формы и размеров заготовки по операциям; расчет изменения формы заготовки, особенно там, где течение металла не ограничено инструментом). 3. Анализ опасности разрушения металла при деформировании (необходимо создать такие условия, чтобы при формоизменении металла не образовывались наружные или внутренние трещины). Для решения указанных задач необходимо вычислить напряжения Для вычисления указанных выше параметров используют полную систему уравнений теории пластичности и теории ОМД, включающую дифференциальные уравнения равновесия, кинематические уравнения, условие несжимаемости, физические уравнения связи напряженного и деформированного состояния металла, дифференциальное уравнение теплопроводности. Решение этой системы является сложной задачей, которую можно реализовать с помощью компьютерных программы, основанных на использовании численных методов математики. Применения программ и численных методов требуют и другие технологические и научные расчеты в ОМД. В предлагаемом учебном пособии в сжатом виде приводятся основные сведения о численных методах решения различных прикладных задач ОМД. Изложение выполнено на доступном для студентов технических вузов уровне. Для ряда рассматриваемых методов приводятся блок-схемы и алгоритмы, а также примеры решения, способствующие лучшему пониманию материала. Пособие написано с учетом особенностей применения численных методов при разработке компьютерных программ. Приведено решение конкретных задач ОМД в виде программ, разработанных в среде программирования VBA (Visual Basic for Applications). Пособие содержит семь глав. В главе 1 приведены основные уравнения теории ОМД, этапы решения задач ОМД на компьютере, особенности численного решения математических задач. В главе 2 изложены численные методы решения нелинейных уравнений и их систем. С использованием этих методов разработана программа для расчета главных напряжений и направляющих косинусов для главных площадок в точке деформируемого тела. Глава 3 содержит сведения по численному решению систем линейных алгебраических уравнений. В главе 4 рассмотрены методы интерполяции. Приведена программа, в которой интерполяция используется для расчета пружинения валков ковочных вальцов. В главе 5 изложено получение эмпирических (аппроксимирующих) формул. Приведена программа для расчета коэффициентов в линейной формуле и формуле квадратного трехчлена. Определены коэффициенты в формулах для расчета пружинения валков ковочных вальцов. Вопросы численного интегрирования изложены в главе 6. Разработана программа для расчета в процессах ОМД формоизменения металла и энергосиловых параметров с использованием энергетического метода и метода минимума полной мощности. Методы решения обыкновенных дифференциальных уравнений приведены в главе 7. С использованием этих методов разработана программа для расчета контактных напряжений при штамповке низких поковок. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ ОМД И ЧИСЛЕННЫЕ МЕТОДЫ Численные методы С использованием математического моделирования решение задачи ОМД сводится к решению математической задачи, которая является ее моделью. Для решения математических задач используются следующие основные группы методов: 1) графические, 2) аналитические, 3) численные [7, 13]. 1. Графические методы в ряде случаев позволяют приближенно определить искомую величину. Решение находится путем геометрических построений. Например, для нахождения корней уравнения 2. Аналитические методы. При их использовании решение задачи удается выразить с помощью формул. Аналитически решаются простейшие
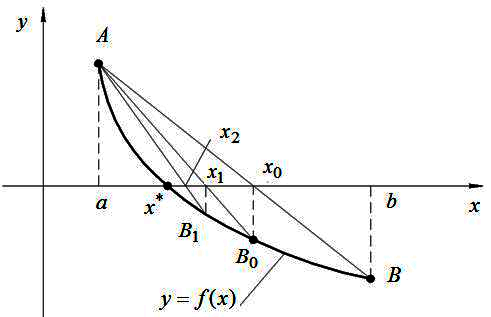
Рис. 1.1. Графическое определение корней уравнения на заданном отрезке
алгебраические или трансцендентные уравнения, вычисляются стандартные интегралы, решаются простые дифференциальные уравнения и т.п. В этом случае используются известные из математики приемы и формулы. Например, при решении квадратного уравнения
Имея конкретные числовые значения коэффициентов На практике свести решение задачи только к использованию аналитических методов удается редко. 3. Численные методы. Это основной инструмент для решения сложных математических задач. Они позволяют свести решение задачи к выполнению конечного числа простых арифметических и логических действий над числами. Результаты получают в виде числовых значений. Например, при решении сложного нелинейного уравнения
формул вида (1.8) для аналитического вычисления корней нет. Для численного решения задают точность числовое значение корня с заданной точностью. На отрезке уравнения (1.9) равен 2, 1665 с точность 0, 001. Многие численные методы разработаны давно. Однако при вычислении вручную они могли использоваться лишь для решения не слишком трудоемких задач. С появлением ЭВМ началось бурное внедрение численных методов в практику. Численный метод должен обладать двумя свойствами [18]: 1) необходимо получать результат за приемлемое время (приемлемое количество операций); 2) он не должен вносить в вычислительный процесс значительных погрешностей. Нелинейные уравнения Вводные замечания
Выражение для нелинейного уравнения имеет следующий вид:
где Алгебраические уравнения содержат только алгебраические функции (целые, рациональные, иррациональные). Общий вид алгебраического уравнения n-ой степени относительно неизвестного х:
Трансцендентные уравнения содержат тригонометрическую, показательную, логарифмическую и другие функции. Примером такого уравнения является выражение (1.9). Аналитически можно решить только простейшие нелинейные уравнения. Эти методы позволяют записать корни в виде некоторого конечного соотношения (формулы). Решение получается сразу путем однократного использования формул или после некоторых преобразований. Пример – решение квадратного уравнения по формулам (1.8). Сложные нелинейные уравнения решают численно. Для этого используют итерационные методы (методы последовательных приближений) [19]. Итерационные численные методы состоят из 2-х этапов: 1) отыскание приближенного (грубого) значения корня или содержащего его отрезка; 2) уточнение приближенного значения до некоторой заданной степени точности. Начальное приближение Итерационный процесс состоит в последовательном уточнении начального приближения Метод половинного деления Метод позволяет решать трансцендентные, а также алгебраические уравнения [8]. Это один из простейших численных методов. На первом этапе необходимо найти отрезок В качестве начального приближения корня Пусть для определенности
Рис. 2.1. Графическая иллюстрация метода половинного деления
Итерационный процесс продолжается до тех пор, пока значение функции
2.1.3. Блок-схема метода половинного деления и числовой пример Сужение отрезка производится путем замены границ а или b на текущее значение корня х. При этом значение нам нужен только знак функции Метод половинного деления отрезка пополам довольно медленный, т.е. для вычисления корня
Рис. 2.2. Блок-схема метода половинного деления
Рассмотрим пример вычисления методом половинного деления одного корня уравнения Для определения отрезка выполним табулирование функции Можно принять что, а = 0, 9 и b = 1, 2, так как f (0, 9) × f (1, 2) < 0. Для
Таблица 2.1 Результаты табулирования функции f ( x )
уменьшения отрезка Примем значение а = 1, 1; f (1, 1) = 0, 29. Окончательно принимаем: а = 1, 1; b = 1, 2; f (1, 1) × f (1, 2) < 0. Следовательно, искомый корень Последовательно имеем (n – номер итерации): 1) f (x) = f [(a+b)/2] = f (1, 15) = 0, 119; n = 1; 2) f [(1, 15+1, 2)/2] = f (1, 175) = 0, 030; n = 2; 3) f [(1, 175+1, 2)/2] = f (1, 1875) = -0, 016; n = 3; 4) f [(1, 175+1, 1875)/2] = f (1, 18125) = 0, 007; n = 4; 5) f [(1, 1875+1, 18125)/2] = f (1, 184375)=- 0, 004; n = 5; ½ f (x)½ < 0, 005; (e = 0, 005). Корень х = х* = 1, 184375.
Метод хорд Пусть найден отрезок Для вывода расчетных формул запишем уравнение хорды АВ (уравнение прямой линии, проходящей через две заданные точки):
Для точки пересечения АВ с осью абсцисс (х = х0; у = 0) получим:
Рис. 2.3. Графическая иллюстрация к методу хорд
На первом этапе вычисления определяем х0 по формуле (2.3). Затем определяем f (х0). Так как f (a) × f (x0) < 0, то искомый корень находится на Блок-схема метода хорд аналогична методу половинного деления. Разница в том, что вместо вычисления приближения корня по формуле x = (a+b)/2 нужно использовать формулу (2.3). Необходимо также ввести операторы вычисления f (x) на границах новых отрезков. Алгоритм метода хорд часто дает более быструю сходимость итерационного процесса по сравнению с методом половинного деления. При этом процесс итераций также всегда сходится (к решению с заданной точностью). Рассмотрим пример вычисления методом хорд одного корня уравнения
Значение f (1, 182) = 0, 004. Следовательно, условие ½ f(x)½ < e выполняется. Корень уравнения х* = х0 = 1, 182. Решение найдено за одну итерацию (n =1). Методом половинного деления решение найдено за 5 итераций. Если погрешность e взять меньше (e = 0, 001), то потребуется вторая итерация: a = x0 = 1, 182 (так как f (1, 182) × f (1, 2) < 0);
Более точный корень уравнения х* = х1 = 1, 18309. Метод хорд в этом случае (и чаще всего) оказался эффективнее метода половинного деления.
Метод простой итерации
Исходное уравнение
Задают начальное приближение корня
Далее подставляем каждый раз новое значение корня в (2.4) получаем последовательность значений:
Итерационный процесс прекращается, если результаты двух последовательных итераций близки:
Здесь Сходимость метода простой итерации зависит от выбора начального приближения Блок-схема метода простой итерации приведена на рис. 2.4. В блок-схеме приведены следующие обозначения:
Рис. 2.4. Блок-схема метода простых итераций
В качестве примера решим уравнение точность Пусть начальное приближение
Искомый корень
Системы уравнений Метод простой итерации Решаем два нелинейных уравнения с двумя неизвестными [13]: Действительные корни необходимо найти с заданной точностью
Графически или другой прикидкой определяем начальные приближения корней
Если итерационный процесс (2.9) сходится, то при некотором числе итераций n, выполняются условия:
При выполнении условий (2.10) вычисления прекращают. Искомые корни При создании компьютерной программы необходимо предусмотреть ограничение числа итераций, так как вычислительный процесс может расходиться. Для примера решим систему уравнений
Необходимо определить положительные корни с точностью Начальные приближения
Задаем Таблица 2.2 Результаты расчетов по формулам (2.12) и (2.13)
Рис. 2.5. Графики, построенные по формулам (2.12) и (2.13)
Теперь из исходной системы (2.11) получим формулы вида (2.8):
Запишем формулы (2.14) в виде, удобном для построения итерационного процесса:
Здесь n – номер итерации. Вычисления по формулам (2.15) приведены в табл. 2.3. Корни найдены на шестой итерации ( Отметим, что вместо рассмотренного метода последовательных приближений (2.9), иногда удобнее пользоваться методом Зейделя:
Метод Зейделя для системы из 3-х уравнений:
Таблица 2.3 Значения последовательных приближений
Метод Ньютона
Обладает гораздо более быстрой сходимостью, чем метод простой итерации. Рассмотрим применение метода для решения системы 2-х нелинейных уравнений [18]:
В основе метода Ньютона для системы уравнений (2.16) служит разложение функций Пусть приближенные значения неизвестных системы (2.16) равны соответственно
Проведем разложение левых частей уравнений (2.16) с учетом (2.17) в ряд Тейлора, ограничиваясь лишь линейными членами относительно приращений (или производными первого порядка):
Поскольку в соответствии с (2.16) левые части этих выражений равны 0, то приравниваем 0 и левые части. Получим следующую систему линейных уравнений относительно приращений
Здесь значения Неизвестные
Здесь
Для существования единственного решения системы (2.19) на каждой итерации должно выполняться условие J ≠ 0. После определения Таким образом, итерационный процесс решения системы (2.16) методом Ньютона состоит в определении приращений
где Метод Ньютона применим для решения системы из n уравнений (n = 2, 3, 4, …). Следует учитывать, что сходимость итерационного процесса ухудшается с увеличением n. Для обеспечения хорошей сходимости важен выбор первого приближения. 2.2.3. Блок-схема метода Ньютона и пример для системы двух уравнений
Блок схема алгоритма метода Ньютона приведена на рис. 2.6. В блоке 2 осуществляется ввод исходных данных: а, b - начальные приближения неизвестных; В качестве примера решим систему нелинейных уравнений: Определим положительные корни с погрешностью
Из второго уравнения системы (2.23) также выразим х:
Задаем последовательно
Рис. 2.6. Блок схема алгоритма метода Ньютона
кривые f1 и f2 (рис. 2.7). Координаты точки пересечения кривых f 1 и f 2 являются начальными приближениями, т.е. а = 0, 9; b = 0, 5 (рис. 2.7). Отметим, что при построении графиков в приложении Excel переменная у в рассматриваемом примере автоматически отложится на горизонтальной оси, так как у задавали, а х вычисляли. Получим формулы для
Рис. 2.7. Графическое определение начальных приближений а и b
Итерация i = 1: a = 0, 9; b = 0, 5; вычисляем J, D х, D у по (2.26), (2.27), (2.28) при x = a, y = b; J = -4, 23; D х = 0, 289; D у = - 0, 2664;
Итерация i = 2: в (2.26), (2.27), (2.28) подставляем a = x = 0, 8317; b = y = 0, 5630; J = -3, 9998; D х = 0, 0225; D у = -0, 0025;
х = 0, 8317 - 0, 00562 = 0, 8261; у = 0, 5630 + 0, 00063 = 0, 5636;
Итерация i = 3: a = x = 0, 8261; b = y = 0, 5636; J = -3, 9537; D х = 0, 0001; D у = -0, 0001;
х = 0, 8261 - 0, 00003 = 0, 8260; у = 0, 5636 + 0, 00002 = 0, 5636;
Вычисления окончены. Корни системы (2.23) с заданной точностью найдены.
И направляющих косинусов Заданы компоненты тензора напряжений
Сначала рассчитаем инварианты |
Последнее изменение этой страницы: 2019-10-04; Просмотров: 384; Нарушение авторского права страницы
 , скорости деформации
, скорости деформации  , скорости перемещения
, скорости перемещения  (
(  ;
;  ) и температуру
) и температуру  . Причем расчет необходимо выполнить для отдельных частиц (или конечных элементов) деформируемого тела с координатами x, y, z в отдельные моменты времени
. Причем расчет необходимо выполнить для отдельных частиц (или конечных элементов) деформируемого тела с координатами x, y, z в отдельные моменты времени  .
.  строится график функции
строится график функции  , точки пересечения которого с осью абсцисс и будут искомыми корнями. Например, при
, точки пересечения которого с осью абсцисс и будут искомыми корнями. Например, при  на заданном отрезке
на заданном отрезке  получим два корня
получим два корня  и
и  (рис. 1.1).
(рис. 1.1). 

 сначала вычисляют дискриминант
сначала вычисляют дискриминант  , а затем определяют корни
, а затем определяют корни  ,
,  . (1.8)
. (1.8) ,
,  и
и  по приведенным формулам находят значения корней.
по приведенным формулам находят значения корней. (1.9)
(1.9) и отрезок
и отрезок  , на котором имеется, по крайней мер, один корень. Затем выполняют по определенным правилам многократно повторяющиеся арифметические и логические действия (итерации) и получают
, на котором имеется, по крайней мер, один корень. Затем выполняют по определенным правилам многократно повторяющиеся арифметические и логические действия (итерации) и получают корень
корень , (2.1)
, (2.1) - некоторая непрерывная функция. Нелинейные уравнения делятся на алгебраические и трансцендентные.
- некоторая непрерывная функция. Нелинейные уравнения делятся на алгебраические и трансцендентные. . (2.2)
. (2.2) может быть найдено из физической постановки решаемой задачи. Если
может быть найдено из физической постановки решаемой задачи. Если  найти не удается, то построением графика функции
найти не удается, то построением графика функции  , входящей в уравнение, определяют две близко расположенные точки
, входящей в уравнение, определяют две близко расположенные точки  и
и  , в которых
, в которых  принимает значения разных знаков, т.е.
принимает значения разных знаков, т.е.  . В этом случае между точками a и b есть, по крайней мере, одна точка, в которой
. В этом случае между точками a и b есть, по крайней мере, одна точка, в которой  . Здесь х* - корень уравнения. В начале выполнения итераций в качестве начального приближения
. Здесь х* - корень уравнения. В начале выполнения итераций в качестве начального приближения  можно принять середину отрезка
можно принять середину отрезка  .
. . Если эти значения с ростом n приближаются к истинному значению корня х*, то говорят, что итерационный процесс сходится.
. Если эти значения с ростом n приближаются к истинному значению корня х*, то говорят, что итерационный процесс сходится.  . При этом используют условие, что
. При этом используют условие, что  . Если уравнение имеет несколько корней, то последовательно задается несколько отрезков и на каждом определяется свой корень.
. Если уравнение имеет несколько корней, то последовательно задается несколько отрезков и на каждом определяется свой корень. принимают середину отрезка
принимают середину отрезка  . Далее определяют значение функции
. Далее определяют значение функции  и
и  . Тот из них, на концах которого
. Тот из них, на концах которого  раз.
раз. < 0,
< 0,  > 0 (рис. 2.1). Находим начальное приближение корня
> 0 (рис. 2.1). Находим начальное приближение корня  < 0, то
< 0, то  и рассматриваем только
и рассматриваем только  . На следующем приближении
. На следующем приближении  . Теперь отбрасываем отрезок
. Теперь отбрасываем отрезок  , так как
, так как  > 0 и
> 0 и  > 0, т.е. x0 < x * < x1. Аналогично находим другие приближения:
> 0, т.е. x0 < x * < x1. Аналогично находим другие приближения:  т.д.
т.д.
 .
.  вычисляется лишь один раз, так как
вычисляется лишь один раз, так как с заданной точностью e может потребоваться большое количество итераций. Однако метод всегда сходится, т.е. при его использовании решение получается всегда. На рис. 2.2 представлена блок-схема метода половинного деления.
с заданной точностью e может потребоваться большое количество итераций. Однако метод всегда сходится, т.е. при его использовании решение получается всегда. На рис. 2.2 представлена блок-схема метода половинного деления.
 с заданной точностью e = 0, 005.
с заданной точностью e = 0, 005. . Результаты табулирования представлены в табл. 2.1.
. Результаты табулирования представлены в табл. 2.1. находится на заданном отрезке, т.е.
находится на заданном отрезке, т.е.  .
. .
.
 ;
;  ;
;  . (2.3)
. (2.3) (см. рис. 2.3). Отрезок
(см. рис. 2.3). Отрезок  отбрасываем. Следующая итерация состоит в определении нового приближенного значения х1 как точки пересечения хорды АВ0 с осью абсцисс и т.д. Для определения х1 в формулу (2.3) подставим b = х0 и f (b) = f (х0). Итерационный процесс продолжается до тех пор, пока значение f (хn) не станет по модулю меньше заданного числа e, т.е.
отбрасываем. Следующая итерация состоит в определении нового приближенного значения х1 как точки пересечения хорды АВ0 с осью абсцисс и т.д. Для определения х1 в формулу (2.3) подставим b = х0 и f (b) = f (х0). Итерационный процесс продолжается до тех пор, пока значение f (хn) не станет по модулю меньше заданного числа e, т.е.  .
.  по формуле (2.3):
по формуле (2.3):  .
. ; f (1, 18309) = 0, 0004.
; f (1, 18309) = 0, 0004. преобразуют к виду [8]:
преобразуют к виду [8]:  . (2.4)
. (2.4) . Подставляя это значение в правую часть (2.4) получаем новое приближение:
. Подставляя это значение в правую часть (2.4) получаем новое приближение:  .
. . (2.5)
. (2.5) (2.6)
(2.6) - заданная точность. Обычно
- заданная точность. Обычно  = 10-6…10-2.
= 10-6…10-2. и преобразования исходного уравнения
и преобразования исходного уравнения  к виду (2.4).
к виду (2.4). - начальное приближение корня, а в дальнейшем результат предыдущей итерации;
- начальное приближение корня, а в дальнейшем результат предыдущей итерации;  - значение корня после каждой итерации. В данной схеме предполагается, что итерационный процесс сходится. Если такой уверенности нет, то необходимо ввести счетчик итераций и ограничение по их максимальному числу.
- значение корня после каждой итерации. В данной схеме предполагается, что итерационный процесс сходится. Если такой уверенности нет, то необходимо ввести счетчик итераций и ограничение по их максимальному числу. 
 . Заданная
. Заданная . Выполняем преобразование исходного уравнения
. Выполняем преобразование исходного уравнения  .
. =1, 2. Его можно определить, например, графически. Последовательность итераций имеет следующий вид:
=1, 2. Его можно определить, например, графически. Последовательность итераций имеет следующий вид: 
 .
. (2.7)
(2.7) . Систему (2.7) преобразуем к виду:
. Систему (2.7) преобразуем к виду:  (2.8)
(2.8) . Итерационный процесс (последовательные приближения) выполняют по формулам:
. Итерационный процесс (последовательные приближения) выполняют по формулам:  (2.9)
(2.9) ,
,  (2.10)
(2.10) .
. (2.11)
(2.11) . Поэтому вычисления выполняем с 3-мя цифрами после запятой.
. Поэтому вычисления выполняем с 3-мя цифрами после запятой. определяем графически. Для этого из первого и второго уравнения выражаем
определяем графически. Для этого из первого и второго уравнения выражаем  :
:  , (2.12)
, (2.12) (2.13)
(2.13)  с равным шагом и выполняем вычисления по формулам (2.12) и (2.13). Результаты заносим в табл. 2.2. По таблице строим два графика (рис. 2.5). Точка пересечения графиков дает приближенные начальные значения
с равным шагом и выполняем вычисления по формулам (2.12) и (2.13). Результаты заносим в табл. 2.2. По таблице строим два графика (рис. 2.5). Точка пересечения графиков дает приближенные начальные значения  Все эти расчеты и построения выполняем с использованием приложения Excel.
Все эти расчеты и построения выполняем с использованием приложения Excel.
 (2.14)
(2.14) (2.15)
(2.15) ), так как выполняются условия (2.10).
), так как выполняются условия (2.10).



 (2.16)
(2.16) и
и  в ряд Тейлора, причем члены ряда, содержащие вторые производные и производные более высоких порядков, отбрасывают.
в ряд Тейлора, причем члены ряда, содержащие вторые производные и производные более высоких порядков, отбрасывают. и
и  . Их определили из начального приближения или они получены на предыдущей итерации. Обозначим приращение (или поправки) к этим значениям
. Их определили из начального приближения или они получены на предыдущей итерации. Обозначим приращение (или поправки) к этим значениям  и
и  . Через
. Через  ,
,  и
и  решение системы (2.16) запишется в виде:
решение системы (2.16) запишется в виде: 
 . (2.17)
. (2.17) (2.18)
(2.18)
 (2.19)
(2.19) и их производные вычисляют при х = а; у = b.
и их производные вычисляют при х = а; у = b. вычисляют по правилу Крамера:
вычисляют по правилу Крамера:  . (2.20)
. (2.20) – определители системы (2.19):
– определители системы (2.19):  ,
,  . (2.21)
. (2.21) и
и  по формуле (2.20)
по формуле (2.20)  и
и  определяют по формуле (2.17). Напомним, что здесь а и b - значения неизвестных на предыдущей итерации, а x и y – значения неизвестных на рассматриваемой итерации.
определяют по формуле (2.17). Напомним, что здесь а и b - значения неизвестных на предыдущей итерации, а x и y – значения неизвестных на рассматриваемой итерации. и
и  к значениям неизвестных на каждой итерации. Вычисления прекращаются, если все вычисления становятся малыми по абсолютной величине:
к значениям неизвестных на каждой итерации. Вычисления прекращаются, если все вычисления становятся малыми по абсолютной величине:  ,
,  , (2.22)
, (2.22) - заданная точность.
- заданная точность. - погрешность вычислений;
- погрешность вычислений;  - максимально допустимое число итераций. В блоке 6 «да» будет в том случае, если выполнятся оба условия. В блоке 5 а, b - значения неизвестных на предыдущей итерации; x, y - значения на рассматриваемой итерации.
- максимально допустимое число итераций. В блоке 6 «да» будет в том случае, если выполнятся оба условия. В блоке 5 а, b - значения неизвестных на предыдущей итерации; x, y - значения на рассматриваемой итерации. (2.23)
(2.23) . Начальные приближения найдем графической прикидкой. Для этого из первого уравнения системы (2.23) выразим х:
. Начальные приближения найдем графической прикидкой. Для этого из первого уравнения системы (2.23) выразим х:  (2.24)
(2.24) . (2.25)
. (2.25) и определяем значения х по формулам (2.24) и (2.25). По полученным точкам строим соответственно
и определяем значения х по формулам (2.24) и (2.25). По полученным точкам строим соответственно
 по исходной системе уравнений (2.23):
по исходной системе уравнений (2.23): 
 (2.26)
(2.26) =
=  (2.27)
(2.27) (2.28)
(2.28)



 .
.


 (МПа):
(МПа):  = 7,
= 7,  = 8,
= 8,  = -9,
= -9,  = 12,
= 12,  = -12,
= -12,  = 3. Необходимо рассчитать главные напряжения
= 3. Необходимо рассчитать главные напряжения ,
,  ,
,  и направляющие косинусы
и направляющие косинусы  ,
,  ,
,  для главных осей тензора.
для главных осей тензора. по формулам (2.31) … (2.33), сформируем кубическое уравнение (2.30) и в результате его решения получим значения главных напряжений
по формулам (2.31) … (2.33), сформируем кубическое уравнение (2.30) и в результате его решения получим значения главных напряжений  ,
,