
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Анализ напряженного состояния металла в точке деформируемого тела ⇐ ПредыдущаяСтр 3 из 3
Расчет главных напряжений и направляющих косинусов Для главных осей тензора напряжений
Рассмотрим применение численных методов решения нелинейных уравнений для расчета главных напряжений и направляющих косинусов для главных площадок. Главными площадками называют площадки, на которых отсутствуют касательные напряжения, то есть на этих площадках действуют только нормальные напряжения. Главными осями тензора напряжений называют нормали к главным площадкам. Главными напряжениями называют нормальное напряжение на главных площадках [1, 12]. Напряжённое состояние в окрестности точки М деформируемого тела характеризуется тензором напряжений Напряжения
Рис. 2.8. Прямоугольная система координат x y z и главные оси тензора напряжений 1, 2, 3
Необходимо по заданному тензору напряжений Значения
где
Уравнение (2.30) называют характеристическим многочленом. Уравнение имеет три действительных корня, которые являются главными нормальными напряжениями. Будем их обозначать Главных напряжений оказалось три. Они действуют на трех главных взаимно ортогональных площадках. Их положение определяется косинусами углов, образованных нормалями к площадкам (главными осями 1, 2, 3) и осями координат x, y, z (рис. 2.8). Для определения направляющих косинусов для первой площадки
подставить вместо При решении системы (2.34) следует использовать два уравнения из первых трёх и четвёртое уравнение. Одно из трех первых уравнений в (2.34), неиспользуемое в расчетах, можно применить для проверки решения системы. После расчета главных нормальных напряжений инварианты тензора напряжений
Инварианты – это параметры, которые не изменяются с поворотом системы координат. Тензор напряжений в главных осях 1, 2, 3:
Программа численного расчета главных напряжений И направляющих косинусов Заданы компоненты тензора напряжений
Сначала рассчитаем инварианты Для вычисления направляющих косинусов из системы (2.34) используем первые два уравнения и четвертое уравнение. Систему из полученных таким образом трех нелинейных уравнений будем решать численно методом Ньютона. При этом вместо Алгоритм численного решения системы из трех уравнений методом Ньютона аналогичен алгоритму для системы из двух уравнений, описанному в п. 2.2.2 и 2.2.3. Отличие в том, что для определения трех неизвестных x, y и z необходимо сформировать четвертый определитель Вычисление главных напряжений и направляющих косинусов реализовано в программе, написанной в среде программирования VBA (Visual Basic for Applications). На рис. 2.9 приведен лист Excel с исходными данными и результатами расчетов. На рис. 2.10 представлен код программы. Программа
Рис. 2.9. Лист Excel с исходными данными и результатами расчетов
состоит из трех процедур (подпрограмм): «Кнопка1_Щелчок», «METOD_HORD», «TRI_UR_NUTON» и функции «FUN». Процедура «Кнопка1_Щелчок» является главной. Она осуществляет запуск всей программы при щелчке на кнопку «Решить» на листе Excel, ввод исходных данных с листа Excel в редактор Visual Basic, вычисление инвариантов Процедура «Кнопка1_Щелчок» организует циклы для вызова вспомогательных процедур «METOD_HORD» и «TRI_UR_NUTON». Каждая из
Рис. 2.10. Код программы для расчета главных напряжений и направляющих косинусов
Рис. 2.10 (продолжение). Код программы для расчета главных напряжений и направляющих косинусов
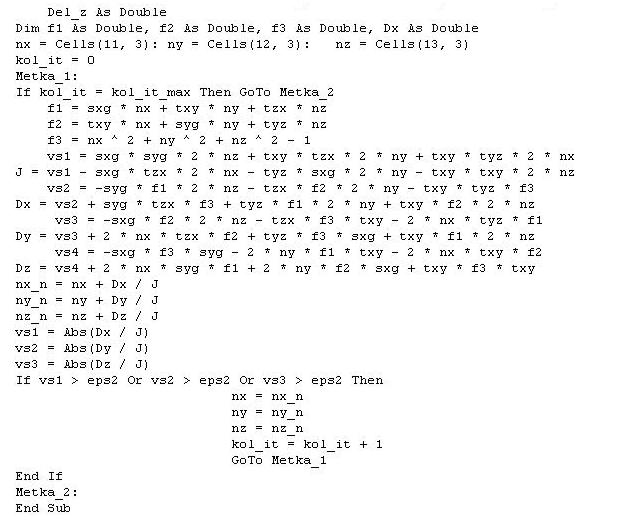
Рис. 2.10 (окончание). Код программы для расчета главных напряжений и направляющих косинусов
этих процедур вызывается трижды. Все циклы организованы с использованием оператора Процедура «METOD_HORD» выполняет последовательное вычисление трех корней кубического уравнения методом хорд. За каждое обращение к процедуре вычисляется один корень. При отладке программы проверка правильности вычисления корней производилась путем подстановки найденных значений в исходное уравнение (2.30). После расчета всех трех корней (главных напряжений Процедура «TRI_UR_NUTON» выполняет последовательное вычисление направляющих косинусов, определяющих положение главных осей 1, 2, 3 тензора напряжений. Оси являются нормалями к главным площадкам. За каждое из трех обращений к процедуре вычисляются три направляющих косинуса путем решения системы из трех нелинейных уравнений методом Ньютона. Из системы (2.34) используются два первых и четвертое уравнение. Третье уравнение использовали для проверки правильности решения. Для обозначения переменных в программе по возможности применяли те же символы, что и при обозначении величин, приведенных в описании численных методов и формулах для расчета напряжений. Приведем краткое описание основных операторов VBA, использованных в программе. Option Explicit – инструкция, указывающая на то, что все переменные в программе должны быть описаны явно, т.е. явно должен быть указан тип переменных. Sub Кнопка1_Щелчок ()... End Sub – начало и конец процедуры под именем Кнопка1_Щелчок ( Sub – процедура, End – оператор). В данном примере Кнопка1_Щелчок является главной процедурой. По отношению к ней процедуры METOD_HORD и TRI _ UR _ NUTON являются подпрограммами. Dim – инструкция, указывающая на описание типа переменной: As Double – число с дробной частью (с плавающей точкой); As Integer – целое число. Переменные I 1, I 2 и другие, тип которых описан перед всеми процедурами и функциями, являются глобальными переменными для данного модуля. Они доступны во всех процедурах. sg (3) – одномерный массив, состоящий из четырех элементов (по умолчанию нумерация элементовначинается с нуля). Worksheets (“Лист1”). Select – рабочий лист Excel по имени Лист1 сделать активным (Worksheet – объект приложения Excel, Select – метод объекта Worksheet). sxx = Cells (2, 3) – значение переменной sxx считывается с активного рабочего листа из ячейки, расположенной во 2-й строке и в 3-ем столбце (Cells – свойство объекта Range (ячейка)); возможно также использование эквивалентной записи sxx = Range (“С2”). For shag = A_lev + 1 To B_prav … Next shag – организация цикла с помощью операторов Fo r … Next (переменная shag изменяется с шагом, равным единице, от значения A_lev + 1 до B_prav). f_x_predv(i) = FUN(shag) – i-му элементу массива присваивается значение, вычисляемое процедурой-функцией FUN (в скобках указано значение переменной, которое передается в процедуру). If… Then… End If – условныйоператор, используемый для изменения хода программы в зависимости от результатов проверки условия. METOD_HORD a(i), b(i), x(i), eps1, kol_it(i) – вызов процедуры METOD_HORD (после имени процедуры указаны имена массивов и переменных, значения которых передаются в процедуру). Cells(i + 3, 6) = x(i) – запись значения i-го элемента массива x в ячейку рабочего листа Excel. Range(" J4: J6" ).Sort key1: =Range(" J4" ), order1: =xlDescending - применение метода Sort объекта Range для сортировки данных по убыванию. Function FUN(x As Double) As Double – процедура-функция под именем FUN (переменная х передает в функцию числовое значение; описание As Double в правой части определяет тип данных, который возвращает функция; Function – процедура). Sub METOD _ HORD ( a As Double, b As Double, x As Double, eps As Double, kol _ it As Integer ) - процедура под именем METOD _ HORD (в скобках указаны имена переменных и их тип данных; количество и тип переменных должны соответствовать записи в операторе, который вызывает эту процедуру в головной программе). Metka_1: - имя метки, на которую должно быть передано управление. GoTo Metka_1 - передача управления на метку с именем Metka_1 (GoTo – оператор безусловного перехода). |
Последнее изменение этой страницы: 2019-10-04; Просмотров: 176; Нарушение авторского права страницы
 . (2.29)
. (2.29) действуют на координатных площадках xoy, xoz и yoz (рис. 2.8). Главные оси тензора
действуют на координатных площадках xoy, xoz и yoz (рис. 2.8). Главные оси тензора  обозначают 1, 2, 3. Угол между этими осями составляет 90˚ и система координат, связанная с главными осями, повернута в пространстве относительно прямоугольной системы координат xyz (рис. 2.8).
обозначают 1, 2, 3. Угол между этими осями составляет 90˚ и система координат, связанная с главными осями, повернута в пространстве относительно прямоугольной системы координат xyz (рис. 2.8).
 ,
,  ,
,  . Это косинусы углов, образованных главными осями 1, 2, 3 и осями координат x, y, z. Необходимо также определить главные напряжения
. Это косинусы углов, образованных главными осями 1, 2, 3 и осями координат x, y, z. Необходимо также определить главные напряжения  .
. , (2.30)
, (2.30) ; (2.31)
; (2.31) (2.32)
(2.32) . (2.33)
. (2.33) ,
,  ,
,  . Индексы назначают по правилу:
. Индексы назначают по правилу:  .
. необходимо в систему уравнений
необходимо в систему уравнений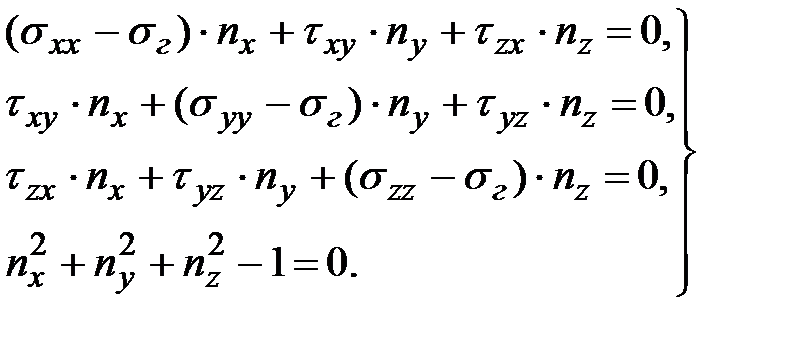 (2.34)
(2.34) значение
значение  . Подставив
. Подставив  , определим
, определим  . Подставив
. Подставив  , определим
, определим  .
. можно записать так:
можно записать так:  (2.35)
(2.35) (2.36)
(2.36) . (2.37)
. (2.37) . (2.38)
. (2.38) = 7,
= 7,  = 8,
= 8,  = -9,
= -9,  = 12,
= 12,  = -12,
= -12,  = 3. Необходимо рассчитать главные напряжения
= 3. Необходимо рассчитать главные напряжения ,
,  . Все определители (
. Все определители (  ,
,  ,
,  ,
, 
 и
и  с шагом, равным единице. При просмотре этого интервала выделяют три отрезка
с шагом, равным единице. При просмотре этого интервала выделяют три отрезка  , на каждом из которых имеется один корень кубического уравнения (2.30). Для вычисления значений функции, входящей в уравнение (2.30) используется процедура-функция «FUN».
, на каждом из которых имеется один корень кубического уравнения (2.30). Для вычисления значений функции, входящей в уравнение (2.30) используется процедура-функция «FUN».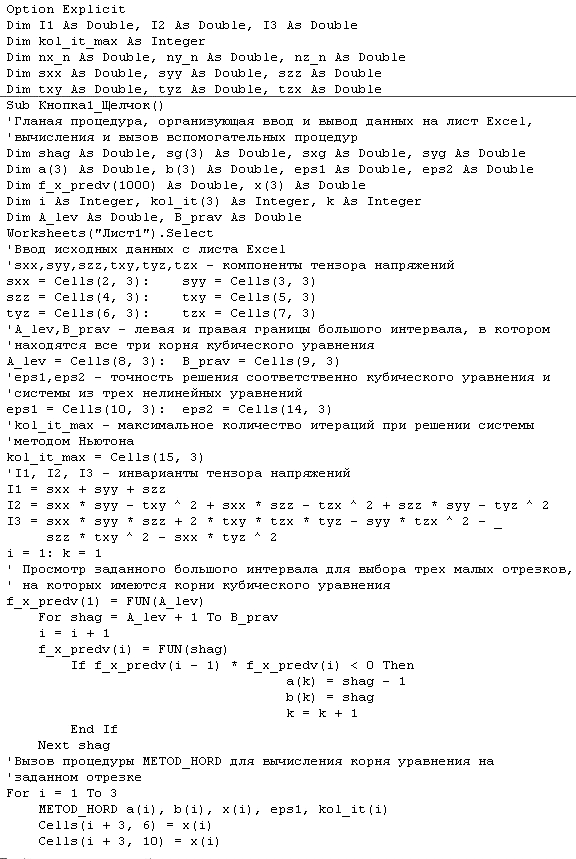

 . В процедуре «Кнопка1_Щелчок» выполняется также вывод результатов расчета в ячейки листа Excel.
. В процедуре «Кнопка1_Щелчок» выполняется также вывод результатов расчета в ячейки листа Excel. по формулам (2.31) и (2.35).
по формулам (2.31) и (2.35).