|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Индукционный датчик магнитного курса
Индукционные датчики магнитного курса лишены многих недостатков, присущих магнитному компасу. В частности, они не имеют подвижной системы, которая вызывает большие погрешности, обусловленные наличием сил трения, увлечением системы жидкостью и дисбалансом.
Будем теперь считать, что зонд находится в постоянном магнитном поле, причем напряженность поля Н направлена под углом θ к оси зонда. Согласно закону электромагнитной индукции, напряжение на вторичной обмотке будет равно
где N – число витков во вторичной обмотке; Ф – магнитный поток, пронизывающий витки вторичной обмотки; μ – магнитная проницаемость магнитопровода; μ 0 – магнитная постоянная; Н – напряженность измеряемого магнитного поля; S – площадь витка вторичной обмотки. Для того чтобы на вторичной обмотке возникло напряжение U2, необходимо, чтобы хотя бы одна из величин в скобках выражения (1.1) изменялась во времени. Если поле Н постоянно и его ориентация относительно оси датчика не меняется, то на первый взгляд напряжение U2 всегда должно быть равно нулю. В действительности это не так, поскольку от времени может зависеть магнитная проницаемость μ. Как известно, магнитная проницаемость ферромагнитного объекта зависит от напряженности намагничивающего поля. При малой величине напряженности поля магнитная проницаемость μ велика (для пермаллоя μ превышает 103), а при большой напряженности поля, когда ферромагнетик намагничивается до насыщения, величина μ ≈ 1.
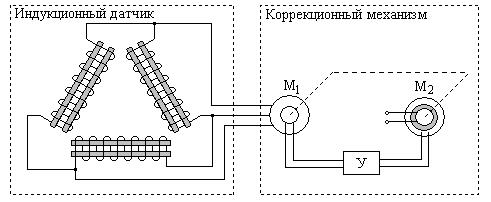
Если поместить такой зонд в постоянное магнитное поле, то вторичную обмотку будет пронизывать переменный магнитный поток и в результате на концах обмотки возникнет переменное напряжение U2 (рис. 1.4, г), частота которого равна 2f. Это напряжение несинусоидальное и поэтому имеет сложный спектр. Если с помощью селективного усилителя выделить вторую гармонику напряжения U2, то ее амплитуда будет пропорциональна напряженности измеряемого магнитного поля Н. Как видно из выражения (1.1), сигнал с выхода усилителя зависит также от ориентации зонда относительно направления вектора Н. Расположив такой зонд параллельно поверхности Земли, можно с его помощью определять направление магнитного меридиана. Однако использовать его в качестве измерителя курса воздушного судна нельзя, так как его выходное напряжение зависит не только от ориентации зонда относительно магнитного меридиана, но и от географической широты места, где находится зонд. Это объясняется тем, что горизонтальная составляющая магнитного поля Земли, на которую и реагирует зонд, различна на разных широтах – максимальна на экваторе и минимальна в районе полюсов. Поэтому в измерителях курса, в частности, в курсовых системах применяют компенсационный способ измерения, не зависящий от величины напряженности магнитного поля Земли, а определяющий только его направление. Суть его иллюстрирует схема, приведенная на рис. 1.5. Индукционный датчик состоит из трех одинаковых зондов, образующих правильный треугольник. Первичные обмотки возбуждения (на схеме не показаны) включены последовательно. Вторичные обмотки включены по схеме треугольника, вершины которого трехпроводной линией связи соединены со статорными обмотками сельсина М1, расположенного в коррекционном механизме курсовой системы. Магнитное поле Земли будет наводить в зондах датчика не одинаковые ЭДС, а в соответствии с их пространственной ориентацией. Поэтому потенциалы на статорных обмотках сельсина зависят от направления горизонтальной составляющей магнитного поля Земли. Напряжение с роторных обмоток сельсина усиливается усилителем У и поступает на управляющие обмотки электродвигателя М2, ротор которого жестко связан с ротором сельсина. После подачи питания двигатель будет вращать ротор сельсина и установит его в такое положение, при котором напряжение на роторной обмотке станет равным нулю, тем самым система самобалансируется.
Рис. 1.5. Схема измерения магнитного курса с помощью индукционного датчика При изменении в полете курса на некоторый угол ∆ ψ изменяются потенциалы на статорных обмотках сельсина, в результате чего на его роторной обмотке возникнет напряжение, которое после усиления поступит на управляющую обмотку двигателя. Двигатель отработает это рассогласование, повернув ротор сельсина на такой же угол, на который изменился курс. Если же самолет летит неизменным курсом, то в процессе полета изменяется географическая широта места и, соответственно, горизонтальная составляющая магнитного поля Земли. Это приводит к пропорциональному изменению всех потенциалов на статорных обмотках сельсина, но не вызывает появления напряжения на его роторной обмотке. В результате двигатель останется неподвижным. Таким образом, все изменения курса будут сопровождаться поворотом ротора, а изменения географической широты места никакого влияния оказывать не будут. Для повышения точности измерения курса магнитные зонды с жестко связанным с ними поплавком помещаются в кардановом подвесе корпуса прибора, заполненного жидкостью. Жидкость, поплавок и карданов подвес обеспечивают примерную горизонтальность магнитных зондов при кренах воздушного судна, уменьшая погрешность от вертикальной составляющей магнитного поля Земли. Следует отметить, что индукционный датчик – более совершенный измеритель курса, поскольку он обладает большей чувствительностью, в нем отсутствуют погрешности от увлечения картушки жидкостью при разворотах, а с помощью коррекционного механизма можно устранять четвертную девиацию. |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 520; Нарушение авторского права страницы
 Чувствительным элементом индукционного магнитного датчика является магнитный зонд, изображенный на рис. 1.3. Пермаллоевый магнитопровод 1 имеет две обмотки – первичную 2 и вторичную 3. Через первичную обмотку пропускается переменный ток, создающий переменные магнитные потоки в обоих стержнях горизонтальной части магнитопровода, на которые намотана вторичная обмотка. В любой момент времени мгновенные значения этих потоков равны по величине и противоположны по знаку, то есть суммарный магнитный поток, пронизывающий витки вторичной обмотки всегда равен нулю. Поэтому при отсутствии внешнего магнитного поля напряжение на вторичной обмотке U2 = 0.
Чувствительным элементом индукционного магнитного датчика является магнитный зонд, изображенный на рис. 1.3. Пермаллоевый магнитопровод 1 имеет две обмотки – первичную 2 и вторичную 3. Через первичную обмотку пропускается переменный ток, создающий переменные магнитные потоки в обоих стержнях горизонтальной части магнитопровода, на которые намотана вторичная обмотка. В любой момент времени мгновенные значения этих потоков равны по величине и противоположны по знаку, то есть суммарный магнитный поток, пронизывающий витки вторичной обмотки всегда равен нулю. Поэтому при отсутствии внешнего магнитного поля напряжение на вторичной обмотке U2 = 0. (1.1)
(1.1) На рис. 1.4, а показано намагничивающее поле Н1, создаваемое протекающим по первичной обмотке током. Как и напряжение U1, оно изменяется по гармоническому закону с частотой f и амплитудой, превышающей Ннас. Когда напряженность намагничивающего поля Н1 по абсолютной величине превышает Ннас, магнитная индукция практически постоянна (рис. 1.4, б), а магнитная проницаемость μ ≈ 1 (рис. 1.4, в). При этом частота изменения магнитной проницаемости в два раза выше, чем частота намагничивающего поля Н1 и напряжения на первичной обмотке U1.
На рис. 1.4, а показано намагничивающее поле Н1, создаваемое протекающим по первичной обмотке током. Как и напряжение U1, оно изменяется по гармоническому закону с частотой f и амплитудой, превышающей Ннас. Когда напряженность намагничивающего поля Н1 по абсолютной величине превышает Ннас, магнитная индукция практически постоянна (рис. 1.4, б), а магнитная проницаемость μ ≈ 1 (рис. 1.4, в). При этом частота изменения магнитной проницаемости в два раза выше, чем частота намагничивающего поля Н1 и напряжения на первичной обмотке U1.