
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Флюгерные датчики аэродинамических углов
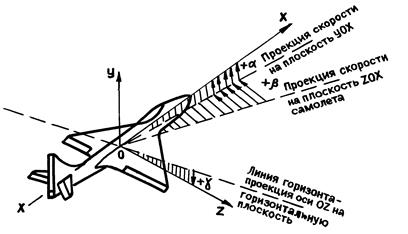
Положение самолета относительно набегающего потока воздуха и Земли определяется углом атаки a, углом скольжения b, углом тангажа J, углом наклона траектории q (рис. 3.12). Угол атаки самолета – это угол между продольной осью ОХ и проекцией вектора скорости V на плоскость YOX связанной системы координат. Угол скольжения самолета –это угол между направлением вектораскоростии плоскостью YOX связанной системы координат. Угол тангажа самолета –это угол между продольной осью ОХ и горизонтальной плоскостью ОХ g Zg земной системы координат. Угол наклона траектории – это угол между направлением скорости самолета V и горизонтальной плоскостью ОХ g Zg земной системы координат. Углы атаки и скольжения являются аэродинамическими параметрами по своей природе. Они используются для обеспечения безопасности полета ВС, для центровки в процессе изменения режимов полета, для управления режимами работы двигателя. Различают местный и истинный аэродинамические углы. Под местным понимают такой угол, который характеризует отклонение потока воздуха относительно строительной оси ВС в том месте, где установлен его измеритель. Под истинным углом понимают теоретический аэродинамический угол, по основному определению угла атаки и скольжения, который определяет в целом ориентацию строительной оси ВС относительно вектора воздушной скорости. Местные аэродинамические углы атаки и скольжения измеряются датчиками аэродинамических углов ДАУ. Местный угол отличается от истинного на величину дополнительных искажений воздушного потока в месте установки измерителя на ЛА.
Рис. 3.12. Положение летального аппарата относительно воздушного потока (а) и горизонта Земли (б) Истинный угол атаки aи, например, можно представить в виде детерминированной зависимости от местного угла атаки (в дозвуковом диапазоне скоростей): aи = ¦ (aм; aу; М; b; Ji; nу; …), (3.7) где aу – начальный угол установки; Ji – конструктивный параметр механизации крыла; nу – нормальная перегрузка. После разложения в ряд Тейлора, ограничиваясь первым приближением, получим: aи = aу + Кaaм + Км где Кa, Км, Кb,
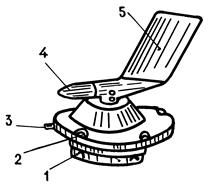
Рис. 3.13. Зависимость истинного угла атаки aи от местного угла атаки aм Все эти коэффициенты определяются в процессе продувок в аэродинамической трубе и подтверждаются в реальных полетах каждого типа ВС в отдельности. Особенно сильная зависимость истинного угла атаки и скольжения от числа М и конструктивного параметра механизации крыла. Измерители аэродинамических углов можно разделить на три класса: 1) зондовые датчики различных принципов действия и конструкций, определяющие местное (локальное) направление набегающего воздушного потока в точке размещения зонда с последующим пересчетом значений местного угла в истинный; 2) аналитические вычислители, определяющие истинные значения аэродинамических углов путем решения уравнения движения ВС относительно этих углов. Имеется в виду, что в алгоритмах вычислителя содержатся переменные величины скорости, ускорения, массы, числа М, измеренные бортовыми датчиками и системами; 3) комплексные измерители, объединяющие различные типы зондовых и аналитических измерителей. Наибольшее применение нашли зондовые датчики местного угла атаки, при помощи которых решаются следующие задачи: - создание новых и модернизация известных конструкций измерителей с целью повышения их статической и динамической точности (в частности, при малых скоростях полета) и обеспечение непрерывного контроля исправности; - проведение теоретических исследований и моделирование совместного движения датчика ВС при различных возмущениях и режимах движения последнего с целью оценки динамических и статических погрешностей, реально возникающих в полете; - изготовление новых конструкций с целью расширения диапазона измеряемых углов (например, угла атаки a ³ 90°), комбинированных датчиков аэродинамических параметров (например, совмещающих измерение угла атаки с измерениями статического и полного давления); - разработка измерителей на основе новых физических принципов с целью повышения точности и надежности измерений и создание конструкций, которые не содержат выступающих за контуры ВС элементов. Комбинированные конструкции измерителей позволяют посредством одного зонда определять несколько воздушно-скоростных параметров, что уменьшает общее число выступающих за обшивку зондов и одновременно расширяет диапазон режимов полета, при которых сохраняется точность измерения этих параметров. Современные датчики аэродинамических углов имеют инструментальную статическую погрешность не больше двух-трех десятков угловых минут. Однако на борту ВС при возмущенном полете их динамическая погрешность может достигать нескольких градусов. Флюгерный датчик аэродинамических углов (ДАУ) предназначен для измерения местных аэродинамических углов – угла атаки и угла скольжения. Характерной его особенностью является то, что в качестве первичного преобразователя (чувствительного элемента) используется зонд в виде флюгарки (рис. 3.14), которая чаще всего представляет собой симметричный клин с малым углом.
Рис. 3.14. Внешний вид датчиков аэродинамических углов флюгерных: а – ДАУ-12; б – ДАУ-85; 1 – корпус; 2 – отверстия крепежные; 3 – фиксатор; 4 – противовес; 5 – флюгарка; 6 – паз крепежный ДАУ устанавливается на фюзеляже или на крыле, на их цилиндрической ровной поверхности, там, где искажение потока минимальное. Кроме того, флюгарка должна выступать за пределы пограничного слоя в том месте, где установлен датчик (рис. 3.15).
Рис. 3.15. Схема размещения ДАУ на фюзеляже воздушного судна: 1 – датчик; 2 – ламинарный поток; 3 – турбулентный поток; 4 – свободный поток; 5 – пограничный слой; 6 – срыв потока; 7 – фюзеляж Для измерения угла атаки ДАУ располагается на фюзеляже так, чтобы ось вращения флюгера располагалась в плоскости XOZ, по возможности, ближе к центру масс ВС. Для измерения угла скольжения ВС такой же ДАУ размещают в плоскости YOX с выполнением всех остальных требований, предъявляемых к установке ДАУ для измерения угла атаки. Датчик ДАУ работает следующим образом (рис. 3.16). В отсутствии скоростного напора масса флюгера 13 уравновешивается относительно оси его вращения 12 массой противовеса 8. Флюгер при этом занимает произвольное положение в пространстве. При появлении скоростного напора зонд – симметричный клин – занимает положение по потоку воздуха, поворачиваясь вокруг оси 12 вместе с жестко закрепленными на ней щетками 9, которые фиксируют угол поворота aпо потенциометрам 10. Для уменьшения колебаний подвижной массы датчика служит жидкостный демпфер 7, ротор которого соединен с шестерней 11, жестко закрепленной на оси 12. Для нормальной работы в условиях обледенения внутри флюгера имеется трубчатый электронагреватель (ТЭН). Элементы схемы 1 – 6 в режиме измерения не участвуют и служат для образования следящей системы тест-контроля ДАУ без съема его с борта ВС. В режиме измерения электромагнит 1 обесточен, шестерня 5 выведена из зацепления с шестернями 3 и 11, ось 12 вращается независимо от элементов схемы 1 – 6. В режиме тест-контроля подается сигнал на электромагнит 1, фрикционная муфта 2 притягивает к себе шестерню 5, вводя ее в зацепление с шестернями 3 и 11. Элементы схемы 1 – 6 и 10 вместе с задающим потенциометром, расположенным на пульте управления в кабине ВС, образуют потенциометрическую следящую систему, с помощью которой проверяется работоспособность ДАУ и системы – потребителя аэродинамических углов.
Рис. 3.16. Кинематическая схема ДАУ: 1 – электромагнит; 2 – фрикционная муфта; 3 – шестерня; 4 – шестерня редуктора; 5 – шестерня муфты; 6 – двигатель; 7 – демпфер; 8 – противовес; 9 – щеткодержатель; 10 – потенциометры; 11 – шестерня на оси флюгера; 12 – ось; 13 – флюгарка Датчик аэродинамических углов флюгерного типа относится к устройствам точной механики. Его погрешность складывается из погрешности затирания подвижной части, из погрешности формы флюгера. Последняя погрешность может быть сведена к минимуму путем выдерживания геометрических размеров флюгера при изготовлении или учетом ее при индивидуальной тарировке датчика в аэродинамической трубе. Погрешность выходного устройства зависит от его типа и, как правило, достигает 0, 05-0, 1 углового градуса. Доминирующей погрешностью флюгерного ДАУ является погрешность от затирания подвижной части датчика, связанная с наличием трения в опорах оси вращения и в выходном устройстве (рис. 3.17). По принципу действия флюгерный ДАУ представляет собой установленное в опорах удобообтекаемое симметричное тело (флюгер) 1, которое под действием аэродинамических сил ориентируется по направлению набегающего на него воздушного потока. Угловое положение флюгера относительно продольной оси самолета фиксируется выходным устройством 3 и в виде электрического сигнала передается потребителю. Для уменьшения влияния внешних ускорений флюгер балансируют относительно оси вращения с помощью груза 5. Необходимое демпфирование подвижной системы датчика обеспечивается жидкостным демпфером 2. Статическая погрешность флюгерного ДАУ наиболее вероятно проявляется в установившемся режиме полета ЛА и, в основном, определяется углом застоя (затирания) Da3. Эту погрешность определяют из уравнения баланса моментов Мдв = Мтр, (3.9) где Мдв – движущий момент; Мтр – момент трения.
Рис. 3.17. Кинематическая модель ДАУ: 1 – флюгер; 2 – демпфер; 3 – потенциометр; 4 – подшипники; 5 – противовес; m1 – масса флюгера; m2 – масса противовеса; a1, a2, l1, l2 – геометрические размеры Движущий момент ДАУ определяется через параметры его конструкции и режим полета следующим образом: Мдв = Су Sl1q(a – j), (3.10) где Су – коэффициент подъемной силы флюгера; S – площадь флюгера; l – расстояние от центра давления профиля до оси вращения флюгера; q = 0, 5rv 2 – cкоростной напор; (a – j) – отклонение флюгера от направления потока; j – угол поворота флюгера; a – угол атаки в месте установки ДАУ; r – плотность воздуха; v – скорость потока. При использовании в ДАУ радиальных шарикоподшипников момент трения определяется по формуле Мтр = (Мву + Мо + KQ) sign где Мву – момент выходного устройства; Мо – суммарный момент трения ненагруженных шарикоподшипников; К – размерный коэффициент, зависящий от типа подшипников; Q = Cx qS – сила лобового сопротивления флюгера, определяющая величину нагрузки шарикоподшипников; Cx – коэффициент лобового сопротивления профиля флюгера; sign– знак направления скорости Считая, что a – j = Da3= Из этой формулы видно, что погрешность застоя ДАУ зависит от режима полета ЛА, то есть от скоростного напора. Чем меньше скорость полета, тем больше погрешность застоя, а в пределе при q ® 0, Da3®¥. И, наоборот, с ростом скорости полета ЛА В силу малости коэффициента К вторая составляющая в формуле (3.12) принимает значение в пределах
Величины суммарного момента трения Мву + Мо по результатам многолетней эксплуатации и опыта конструирования ДАУ лежат в пределах (2, 5…4) 10-4 кг× м. Этого добиваются не только выбором подшипников с минимальным моментом трения, но и рациональной схемой их установки в конструкции датчика, а также применением выходного устройства с минимальным моментом трения, например, БСКТ. Значение коэффициента Су флюгера по аналогии с крылом самолета зависит от его профиля, характеризующегося удлинением (lф), сужением (hф) и углом стреловидности (c), а также от числа М: Су = f(lф, hф, c, М). (3.14) Значения угла застоя для различных скоростей полета приведены на рис. 3.18 [13].
Рис. 3.18. Зависимость угла застоя Da3 от скорости полета V |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 1365; Нарушение авторского права страницы
 (3.8)
(3.8) ,
,  – коэффициенты, учитывающие искажение потока в месте установки ДАУ, влияние числаМ, угла скольжения, конструктивного параметра и вертикальной перегрузки. Как правило, местный угол атаки больше истинного (Кa = 0, 4 – 0, 8; рис. 3.13).
– коэффициенты, учитывающие искажение потока в месте установки ДАУ, влияние числаМ, угла скольжения, конструктивного параметра и вертикальной перегрузки. Как правило, местный угол атаки больше истинного (Кa = 0, 4 – 0, 8; рис. 3.13).
 а
а
 б
б



 , (3.11)
, (3.11) a3, из формул (3.10), (3.11) определим величину погрешности застоя:
a3, из формул (3.10), (3.11) определим величину погрешности застоя:  . (3.12)
. (3.12) (3.13)
(3.13)