|
| Программируемые интеллектуальные реле являются одной из разновидностей ПЛК (программируемые логические контроллеры). Применение интеллектуальных реле позволяет значительно упростить схемы управления электрооборудованием, повысить их надежность.
Задание программы для интеллектуальных реле производится при помощи кнопок на лицевой панели и небольшого, как правило, в одну – две строки LCD индикатора. Хотя существуют и более сложные конструкции, и в этих случаях программы приходится писать на персональном компьютере, с использованием специализированных языков программирования релейной. Для загрузки (прошивки) готовых программ в память микроконтроллера используются интерфейсы типа RS-232, RS-485 или Industrial Ethernet, позволяющие также осуществлять связь с АСУ верхнего уровня. Некоторые модели программируемых интеллектуальных реле позволяют наращивать возможности коммуникации при помощи специальных модулей расширения.
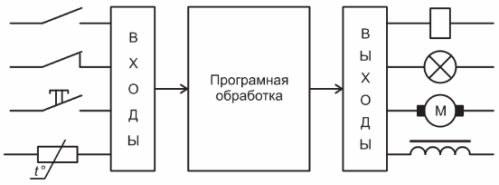 Принцип работы ПЛК
Отличие интеллектуальных реле от полноценных ПЛК в том, что они обладают малым объемом оперативной и программной памяти, а это приводит к невозможности хоть сколько-нибудь сложных математических вычислений. Кроме того количество каналов ввода – вывода как цифровых, так и аналоговых у интеллектуальных реле также невелико, поэтому область их применения достаточно ограничена. Прежде всего, это автоматизация отдельных агрегатов, управление системами освещения, некоторыми устройствами в системе ЖКХ, локальные контуры различных систем автоматизации, бытовая техника.
Конструкция программируемых интеллектуальных реле чаще всего моноблочная, - в одном небольшом корпусе содержатся все узлы. Это, как правило, блок питания небольшой мощности, микроконтроллер, каналы ввода и вывода информации, клеммы для подключения исполнительных устройств. Корпуса таких устройств невелики и позволяют установку в электрических шкафах на DIN – рейку, что соответствует современным стандартам. Впрочем, блок питания может быть и отдельным устройством.
Принцип работы ПЛК
Отличие интеллектуальных реле от полноценных ПЛК в том, что они обладают малым объемом оперативной и программной памяти, а это приводит к невозможности хоть сколько-нибудь сложных математических вычислений. Кроме того количество каналов ввода – вывода как цифровых, так и аналоговых у интеллектуальных реле также невелико, поэтому область их применения достаточно ограничена. Прежде всего, это автоматизация отдельных агрегатов, управление системами освещения, некоторыми устройствами в системе ЖКХ, локальные контуры различных систем автоматизации, бытовая техника.
Конструкция программируемых интеллектуальных реле чаще всего моноблочная, - в одном небольшом корпусе содержатся все узлы. Это, как правило, блок питания небольшой мощности, микроконтроллер, каналы ввода и вывода информации, клеммы для подключения исполнительных устройств. Корпуса таких устройств невелики и позволяют установку в электрических шкафах на DIN – рейку, что соответствует современным стандартам. Впрочем, блок питания может быть и отдельным устройством.
 Рисунок.
Для промышленного и бытового применения компанией выпускаются интеллектуальные реле второго поколения серии FAB. Эти устройства достаточно просты в эксплуатации и легко поддаются изучению и программированию. Для программирования реле FAB используется язык программирования FDB, предназначенный, в основном, для инженеров, занимающихся автоматизацией. С его помощью можно создать достаточно сложную систему, при этом эффективную и экономичную.
Язык программирования FDB представляет язык блоков, которые в процессе ввода программы показываются на дисплее. Функциональные блоки просто выстраиваются и объединяются в определенной последовательности, как последовательно, так и параллельно, что позволяет наглядно создавать достаточно сложные алгоритмы. Всего в языке имеется 20 блоков, выполняющих различные функции. Прежде всего, это логические операции, внешне напоминающие картинки из справочника по цифровым микросхемам. Кроме логических операций в наборе блоков имеются также счетчики, таймеры, задержки времени, метки времени включения и выключения, и другие.
Среда программирования поставляется совместно с устройствами, а также доступна для скачивания с сайта производителя. Интеллектуальные реле серии FAB заменяют собой большое количество коммутационных устройств: реле, тахометры, счетчики, таймеры и т.п. при этом по достаточно низкой цене. Одно программируемое интеллектуальное реле позволяет заменить целый шкаф, собранный на обычных электромеханических реле. При этом надежность схемы в целом возрастает, количество дискретных элементов уменьшается, снижаются габариты, уменьшается энергопотребление.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что то же самое, производной измеряемой величины).
Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п.
Как получается ПИД-регулятор? Берём разницу между текущей температурой и нужной, умножаем на настраиваемый коэффициент, получаем мощность, которую надо выдать в данный момент. Это пропорциональная составляющая, она работает в момент появления рассогласования — то есть моментально откликается как на изменение уставки, так и на поведение объекта. Начал подогреваться? Мощность начинает спадать. Перегрелся? Выключилось, или даже дали сигнал охлаждения. Всё хорошо, вот только в реальной жизни эффект от воздействия проявляется с запаздыванием, а на объект воздействуем не только мы, но еще и окружающая среда: разогретый реактор не только внутри горячий, но еще и остывает, отдавая тепло комнате, а потому как только выключаем мощность, он сразу начинает остывать. Поэтому чистый пропорциональный регулятор колеблется вокруг точки поддержания, и тем сильнее колеблется, чем выше воздействие окружающей среды / содержимого реактора. Чтобы компенсировать «внешние» воздействия на реактор, в цепь добавляют интегральную составляющую. Всё рассогласование, которое было в системе, идёт на интегратор (соответственно, как только мы перегрели — сумма уменьшается, пока недогрето — сумма увеличивается). И накопленный интеграл, со своим коэффициентом, даёт свою прибавку-убавку к мощности. В результате такого подхода, при стационарном процессе, через некоторое время интеграл подбирает такой вклад в сумму с мощностью, который компенсирует потери окружающей среды, и колебания исчезают — интеграл становится стабильным, поэтому величина выдаваемой мощности становится постоянной. Причем так как при этом держится нужная температура, рассогласование отсутствует, пропорциональная составляющая не работает вообще. Для компенсации влияния задержек между воздействием и реакцией системы, в систему добавляют дифференциальную составляющую. Просто пропорциональный регулятор даёт мощность всё время, пока температура не достигнет нужной точки, пропорционально-дифференциальный начинает снижать подаваемую мощность раньше, чем догрелся до нужной точки — так как рассогласование уменьшается, имеется наличие отрицательной производной, уменьшающей воздействие. Это позволяет минимизировать перегрев при больших переходах.
В качестве примера устройств ПИД-регулирования можно рассмотреть:
- Термодат 16Е6
- ТРМ10
См. Руководство.
Рисунок.
Для промышленного и бытового применения компанией выпускаются интеллектуальные реле второго поколения серии FAB. Эти устройства достаточно просты в эксплуатации и легко поддаются изучению и программированию. Для программирования реле FAB используется язык программирования FDB, предназначенный, в основном, для инженеров, занимающихся автоматизацией. С его помощью можно создать достаточно сложную систему, при этом эффективную и экономичную.
Язык программирования FDB представляет язык блоков, которые в процессе ввода программы показываются на дисплее. Функциональные блоки просто выстраиваются и объединяются в определенной последовательности, как последовательно, так и параллельно, что позволяет наглядно создавать достаточно сложные алгоритмы. Всего в языке имеется 20 блоков, выполняющих различные функции. Прежде всего, это логические операции, внешне напоминающие картинки из справочника по цифровым микросхемам. Кроме логических операций в наборе блоков имеются также счетчики, таймеры, задержки времени, метки времени включения и выключения, и другие.
Среда программирования поставляется совместно с устройствами, а также доступна для скачивания с сайта производителя. Интеллектуальные реле серии FAB заменяют собой большое количество коммутационных устройств: реле, тахометры, счетчики, таймеры и т.п. при этом по достаточно низкой цене. Одно программируемое интеллектуальное реле позволяет заменить целый шкаф, собранный на обычных электромеханических реле. При этом надежность схемы в целом возрастает, количество дискретных элементов уменьшается, снижаются габариты, уменьшается энергопотребление.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что то же самое, производной измеряемой величины).
Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п.
Как получается ПИД-регулятор? Берём разницу между текущей температурой и нужной, умножаем на настраиваемый коэффициент, получаем мощность, которую надо выдать в данный момент. Это пропорциональная составляющая, она работает в момент появления рассогласования — то есть моментально откликается как на изменение уставки, так и на поведение объекта. Начал подогреваться? Мощность начинает спадать. Перегрелся? Выключилось, или даже дали сигнал охлаждения. Всё хорошо, вот только в реальной жизни эффект от воздействия проявляется с запаздыванием, а на объект воздействуем не только мы, но еще и окружающая среда: разогретый реактор не только внутри горячий, но еще и остывает, отдавая тепло комнате, а потому как только выключаем мощность, он сразу начинает остывать. Поэтому чистый пропорциональный регулятор колеблется вокруг точки поддержания, и тем сильнее колеблется, чем выше воздействие окружающей среды / содержимого реактора. Чтобы компенсировать «внешние» воздействия на реактор, в цепь добавляют интегральную составляющую. Всё рассогласование, которое было в системе, идёт на интегратор (соответственно, как только мы перегрели — сумма уменьшается, пока недогрето — сумма увеличивается). И накопленный интеграл, со своим коэффициентом, даёт свою прибавку-убавку к мощности. В результате такого подхода, при стационарном процессе, через некоторое время интеграл подбирает такой вклад в сумму с мощностью, который компенсирует потери окружающей среды, и колебания исчезают — интеграл становится стабильным, поэтому величина выдаваемой мощности становится постоянной. Причем так как при этом держится нужная температура, рассогласование отсутствует, пропорциональная составляющая не работает вообще. Для компенсации влияния задержек между воздействием и реакцией системы, в систему добавляют дифференциальную составляющую. Просто пропорциональный регулятор даёт мощность всё время, пока температура не достигнет нужной точки, пропорционально-дифференциальный начинает снижать подаваемую мощность раньше, чем догрелся до нужной точки — так как рассогласование уменьшается, имеется наличие отрицательной производной, уменьшающей воздействие. Это позволяет минимизировать перегрев при больших переходах.
В качестве примера устройств ПИД-регулирования можно рассмотреть:
- Термодат 16Е6
- ТРМ10
См. Руководство.
|
