|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Структурный анализ механизмаСтр 1 из 5Следующая ⇒
ВВЕДЕНИЕ
Развитие современной науки и техники неразрывно связано с созданием новых машин, повышающих производительность и облегчающих труд людей, а также обеспечивающих средства исследования законов природы и жизни человека. Целью создания машин является увеличение производства и облегчение физического труда человека путем замены человека машиной. В некоторых случаях машина может заменить человека не только в его физическом, но и в умственном труде. Созданные человеком машины могут управлять производственными и другими процессами по определенным, заранее составленным программам и обеспечивать автоматически обеспечивать процессы с оптимальными результатами. Теория механизмов и машин как наука позволяет проектировать механизмы, применяемые в различных рабочих машинах, автоматах, автоматических линиях, транспортных машинах и т. д. Необходимо уметь выполнять расчеты и исследовать для автоматов специфические механизмы, например, с периодической остановкой ведомого звена, управления и регулирования, блокирующие и предохранительные, а также выполняющие всякого рода контрольные функции.
РЕФЕРАТ
Курсовой проект по теории механизмов и машин Иванова И.И., студента механического факультета группы ПТМ-1а. Пояснительная записка содержит 52 страницы, 1 таблицу, 13 рисунков. В работе обоснованы кинематические и кинетостатические параметры плоского рычажного механизма. Выполнен динамический анализ и определены параметры маховика, а также кинематический и кинетостатический анализ кулачкового механизма. Синтез эпициклического механизма. ЗВЕНО, ПЛАН СКОРОСТЕЙ, ПЛАН УСКОРЕНИЙ, КИНЕМАТИЧЕСКАЯ ПАРА, ПЛОСКИЙ РЫЧАЖНЫЙ МЕХАНИЗМ, ДЕЗАКСИАЛЬНЫЙ МЕХАНИЗМ, РОЛИК, ПЛАН СИЛ, РЫЧАГ ЖУКОВСКОГО, МОМЕНТ ИНЕРЦИИ МАХОВИКА, ЭВОЛЬВЕНТНОЕ ЗАЦЕПЛЕНИЕ, ПРОФИЛЬ КУЛАЧКА, ПЕРЕДАТОЧНОЕ ЧИСЛО.
1 Кинематический анализ механизма 1.1 Построение планов положений механизма
Длины звеньев механизмов:
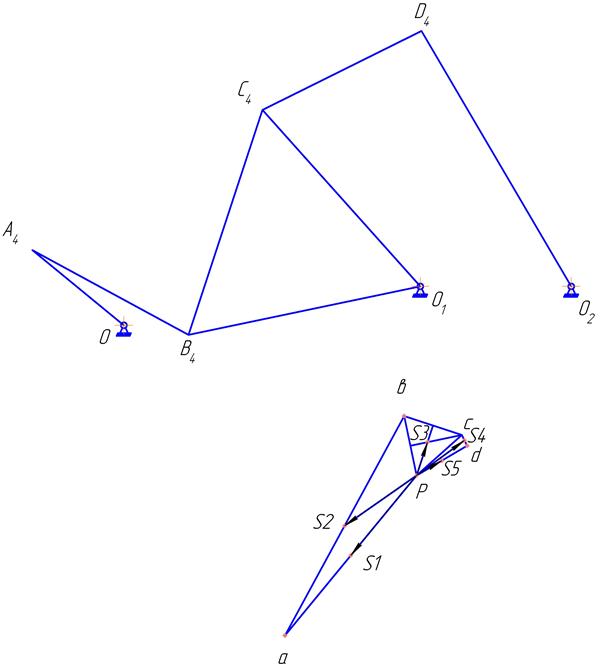
Из центра О проводим окружность радиусом ОА- траекторию движения точки А, из точки О1- дугу радиусом ВО1-траекторию движения точки В, дугу радиусом СО1- траекторию движения точки С. Проводим линию, по которой движется ползун 5. Делим окружность ОА на 8 равных частей. Получаем 8 положений точки А. Радиусом АВ из точки А делаем засечку на дуге радиуса ВО1, получаем точку В. Из точки В радиусом ВС делаем засечку на дуге СО1. Получаем точку С. Из точки С радиусом, равным длине звена СД, делаем засечку на линии движения ползуна, получаем точку Д. Масштаб построения mL= где
Общие положения
Цель кинетостатического анализа-определение реакций в кинематических парах, а также установление величины уравновешивающей силы, приложенной к начальному звену. Для кинетостатического анализа используется принцип Даламбера для каждой структурной группы механизма, начиная с последней присоединенной:
где
Исходными данными является закон движения исходного звена, а также приложенные к механизму активные силы и силы сопротивления, силы инерции. Будем считать, что начальное звено (кривошип) движется равномерно с постоянной угловой скоростью. Векторы сил тяжести приложены в центрах тяжести и направлены вертикально вниз. Массы звеньев определяются по формуле:
где Силы инерции сводятся к главному вектору и главному моменту с точкой, приложенной в центре тяжести:
где Векторы сил инерции приложены в центрах тяжести и направлены в сторону, противоположную ускорению в центрах тяжести, а момент сил инерции направлен в сторону, противоположную угловому ускорению звена. Кинетостатический анализ рассмотрен для 7-го положения механизма. Определяем массу звеньев:
Массы звеньев:
Моменты инерции звеньев:
Силы инерции звеньев:
Моменты сил инерции звеньев:
Расчет начальной группы
Вычерчиваем в масштабе mL= 0, 0025 м/мм ведущее звено. Прикладываем к нему силу тяжести G1, силу инерции Fu1, в точке А – реакцию R21
В точке О прикладываем реакцию R01 cо стороны стойки в любом направлении. В точке А прикладываем уравновешивающую силу Fу перпендикулярно звену ОА в любом направлении. Определяем уравновешивающую силу Fу из уравнения моментов сил относительно точки О. Ру LOA + R21 hR-G1 hG=0 (2.13) Ру = где hR=hR mL= hG=hG mL= Ру = Определяем силу реакции R01 графически. Для этого составляем уравнение равновесия всех сил, действующих на звено 1.
Задаемся масштабом плана сил mР= 5 Н/мм Вычисляем величины отрезков, которые будут отображать эти векторы на плане сил: [G1] =G1 / mР=73, 5/5=14 мм [R21]=R21/mР=380/5=76 мм [Ру]=Fу/mР=140, 8/5=28 мм [Fu1]=Fu1/mР=93, 75/5=18 мм Соответственно векторному уравнению последовательно откладываем данные векторы, начало вектора Fу соединяем с концом вектора G1 и получим искомый вектор R01. Измерив на плане сил длину отрезка, который отображает этот вектор и вычислим его величину: R01 =[R01 ] mР=
Эвольвентное зацепление
Числа зубьев: Z1=35 Z2=39 Модуль m=10 мм Диаметры делительные
d1= d2= Диаметры вершин зубьев
da1= da2= Диаметры впадин зубьев
df1= df2= Шаг зацепления
Pt= Ширина зуба по хорде делительной окружности
St= Высота зуба
Определяем масштаб построения
Радиусами r1 u r2 из центров О1 и О2 проводим дуги делительных окружностей, соприкасающихся в точке W, называемой полюсом зацепления. Через эту точку проводим общую касательную tt. Через полюс W под углом Из центров О1 и О2 радиусами O1N1 и O2N2 проводим дуги основных окружностей. Строим эвольвенты, которые описывает точка W, лежащая на прямой N1N2. (Эвольвента- это кривая переменного радиуса, описываемая точкой W прямой линии, перекатываемой по основной окружности без скольжения. При построении эвольвенты отрезок WN1 разбиваем на четыре равные части и из точки 3 радиусом 3-W проводим дугу до пересечения с основной окружностью в точке W1. В этом случае дуга N1W1 равна отрезку N1W. После этого на прямой WN1 вниз от точки N1 откладываем отрезки N15, 56, 67, равные отрезкам W1, W2, W3. Из точек 1’, 2’, 3’, 4’ проводим перпендикуляры к соответствующим радиусам O11, O12, … (или касательные к основной окружности в точках 1’, 2’, 3’..). На этих перпендикулярах откладываем отрезки 1’1’’, 2’2’’, 3’3’’, соответственно равные отрезкам 1W, 2W, 3W. Соединяя последовательно точки W1, 1’’, 2’’, 3’’ … плавной кривой, получим эвольвенту для первого колеса. Таким же образом строим эвольвенту для второго колеса. Строим окружности вершин обоих колес. Строим окружности впадин обоих колес. Сопряжение радиальной прямой с окружностью впадин осуществляется радиусом От полюса зацепления по делительным окружностям откладываем отрезки, равные половине ширины зуба. Соединив их с центрами колес, получим оси симметрии зубьев. Симметричные профили строим путем переноса размеров через оси симметрии зуба по концентрическим окружностям, приведенным из центров колес. Ширина зуба по хорде делительной окружности Определяем коэффициент перекрытия.
Аналитически:
Коэффициент удельного давления
Коэффициенты скольжения
Выводы
В данном курсовом проекте получены следующие основные результаты: 1. Проведен кинематический и кинетостатический анализ плоского рычажного механизма. 2. Проведен динамический анализ плоского рычажного механизма и выполнен синтез маховика. 3. Выполнен кинематический анализ и синтез кулачкового механизма. 4. Выполнен синтез эпициклического механизма, включая обеспечение условий соосности, соседства и сборки. 5. Построено эвольвентное зацепление.
По результатам расчетов выполнены графические документы: 1. Кинематический анализ плоского рычажного механизма (формат А1). 2. Кинетостатический анализ плоского рычажного механизма (формат А1). 3. Динамический анализ плоского рычажного механизма (формат А1). 4. Кинематический анализ и синтез кулачкового механизма (формат А2). 5. Эвольвентное зацепление (формат А2).
Литература
1. Артоболевский И.И. Теория механизмов и машин. – М.: Наука, 1988. – 638 с. 2. Левитский Н.И. Теория механизмов и машин: Учеб. пособие для вузов. – 2-е изд., перераб. и доп. – М.: Наука, Гл. ред. физ.-мат. лит., 1990. – 592 с. 3. Озол О.Г. Теория механизмов и машин. – М.: Наука, 1984. – 432 с. 4. Попов С.А. Курсовое проектирование по теории механизмов и механике машин: Учеб. пособие для втузов / С.А. Попов, Г.А. Тимофеев; Под ред. К.В. Фролова. – 4-е изд., перераб. и доп. – М.: Высш. шк., 2002. – 411 с. 5. Теория механизмов и механика машин: Учеб. для втузов / К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова. – 3-е изд., стер. – М.: Высш. шк., 2001. – 496 с. 6. Методические указания к выполнению курсового проекта по дисциплине «Теория механизмов и машин» (для студентов специальностей 7.090214 “Подъемно- транспортные, строительные, дорожные, мелиоративные машины и оборудование” и 7.090258 „Автомобили и автомобильное хозяйство” очной формы обучения) / Сост.: В.П. Мельник, Н.А. Юрченко, А.Н. Клен – Макеевка: ДонНАСА, 2006. – 112 с. ВВЕДЕНИЕ
Развитие современной науки и техники неразрывно связано с созданием новых машин, повышающих производительность и облегчающих труд людей, а также обеспечивающих средства исследования законов природы и жизни человека. Целью создания машин является увеличение производства и облегчение физического труда человека путем замены человека машиной. В некоторых случаях машина может заменить человека не только в его физическом, но и в умственном труде. Созданные человеком машины могут управлять производственными и другими процессами по определенным, заранее составленным программам и обеспечивать автоматически обеспечивать процессы с оптимальными результатами. Теория механизмов и машин как наука позволяет проектировать механизмы, применяемые в различных рабочих машинах, автоматах, автоматических линиях, транспортных машинах и т. д. Необходимо уметь выполнять расчеты и исследовать для автоматов специфические механизмы, например, с периодической остановкой ведомого звена, управления и регулирования, блокирующие и предохранительные, а также выполняющие всякого рода контрольные функции.
РЕФЕРАТ
Курсовой проект по теории механизмов и машин Иванова И.И., студента механического факультета группы ПТМ-1а. Пояснительная записка содержит 52 страницы, 1 таблицу, 13 рисунков. В работе обоснованы кинематические и кинетостатические параметры плоского рычажного механизма. Выполнен динамический анализ и определены параметры маховика, а также кинематический и кинетостатический анализ кулачкового механизма. Синтез эпициклического механизма. ЗВЕНО, ПЛАН СКОРОСТЕЙ, ПЛАН УСКОРЕНИЙ, КИНЕМАТИЧЕСКАЯ ПАРА, ПЛОСКИЙ РЫЧАЖНЫЙ МЕХАНИЗМ, ДЕЗАКСИАЛЬНЫЙ МЕХАНИЗМ, РОЛИК, ПЛАН СИЛ, РЫЧАГ ЖУКОВСКОГО, МОМЕНТ ИНЕРЦИИ МАХОВИКА, ЭВОЛЬВЕНТНОЕ ЗАЦЕПЛЕНИЕ, ПРОФИЛЬ КУЛАЧКА, ПЕРЕДАТОЧНОЕ ЧИСЛО.
1 Кинематический анализ механизма 1.1 Построение планов положений механизма
Длины звеньев механизмов:
Из центра О проводим окружность радиусом ОА- траекторию движения точки А, из точки О1- дугу радиусом ВО1-траекторию движения точки В, дугу радиусом СО1- траекторию движения точки С. Проводим линию, по которой движется ползун 5. Делим окружность ОА на 8 равных частей. Получаем 8 положений точки А. Радиусом АВ из точки А делаем засечку на дуге радиуса ВО1, получаем точку В. Из точки В радиусом ВС делаем засечку на дуге СО1. Получаем точку С. Из точки С радиусом, равным длине звена СД, делаем засечку на линии движения ползуна, получаем точку Д. Масштаб построения mL= где
Структурный анализ механизма
Представим структурную схему механизма (рис. 1.1) и найдем степень его подвижности.
Рисунок 1.2.1 -Структурная схема механизма
где n-число подвижных звеньев, p5- число кинематических пар 5-го класса, p4- число кинематических пар 4-го класса.
Таким образом, механизм имеет одну степень свободы. Механизм относится к механизму первого класса и имеет второй порядок. 1.3 Определение численных значений линейных и угловых скоростей по методу плана скоростей
Для построения плана скоростей используется теорема о распределении скоростей точек плоской фигуры:
где
Рисунок 1.3.1- К теореме о распределении скоростей точек плоской фигуры
Причем, Рассмотрим механизм в положениях 0-7. Найдем величину скорости точки А VА= w1 LОА, м/с (1.4) где
Скорость точки А направлена перпендикулярно звену ОА в сторону движения механизма. Примем величину скорости т. А равной 100 мм.
где
Скорость точки В находим графически
Из конца вектора скорости точки А проводим направление
Скорость точки С находим графически
Из конца вектора скорости точки В проводим направление
Для нахождения скорости точки Д напишем уравнение
Из конца скорости точки С проводим перпендикуляр к направлению звена СД. Так как точка Д движется по горизонтали, из полюса Р проводим горизонтальную линию. На пересечении найдем точку d.
Угловая скорость 2 звена wAВ= Угловая скорость 3 звена wСВ= Угловая скорость 4 звена wДС = Скорости центров масс найдем по формуле:
Полученные данные занесем в таблицу.
Таблица 1 – Значения скоростей звеньев и точек
Рисунок 1.3.2- План положений 0, план скоростей к положению 0
Рисунок 1.3.3- План положений 1, план скоростей к положению 1
Рисунок 1.3.4- План положений 2, план скоростей к положению 2
Рисунок 1.5- План положений 3, план скоростей к положению 3
Рисунок 1.6- План положений 4, план скоростей к положению 4
Рисунок 1.7- План положений 5, план скоростей к положению 5
Рисунок 1.8- План положений 6, план скоростей к положению 6
Рисунок 1.9- План положений 7, план скоростей к положению 7 1.4 Построение плана ускорений
Построение плана ускорений механизма основано на теореме о распределении ускорений точек плоской фигуры:
Рисунок 1.12- К теореме о распределении ускорений точек плоской фигуры
Ускорение точки В плоской фигуры
где
Причем
Ускорение точки А кривошипа механизма определяем из уравнения
Так как угловая скорость первого звена постоянна, значит,
Зададим, что ускорение точки A кривошипа на плане ускорений равно 100 мм. Тогда масштаб плана ускорений
где
Ускорение точки В
Полученное значение делим на масштаб и получаем отрезок, который отложим на плане ускорений:
Из полюса p параллельно звену AO к центру проводим аAOп, из его конца параллельно звену ВA- аВAw, потом проводим направление аВAe, т. е. линию, перпендикулярную звену ВA. Из полюса p проводим аВО1w параллельно ВО1, из его конца- направление аВО1e, т. е. линию, перпендикулярную звену ВО1. На пересечении получим точку Ускорение точки С
где аСВw=wСВ2 LСВ= аСО1w=wСО12 LСО1= Полученное значение делим на масштаб и получаем отрезок, который отложим на плане ускорений:
Из полюса p параллельно звену СO1 проводим аСO1п, из его конца параллельно звену СО1- аСО1e. Из точки Измерив полученные отрезки, умножаем на масштаб аC= аB= аВAe = аВО1e = Ускорение точки D
где аДСw=wДС2 LДС= Вычисленное значение делим на масштаб плана ускорений
откладываем из конца вектора ускорения точки С параллельно звену DС, из его конца проводим направление аDСe, т. е. перпендикуляр к звену DС. Так как точка D движется по горизонтальной линии, из полюса проводим горизонтальную линию. На пересечении получим точку d. аD= аDСe= Угловые ускорения звеньев:
Ускорения центров масс звеньев
|
Последнее изменение этой страницы: 2019-06-08; Просмотров: 160; Нарушение авторского права страницы
 ,
, 






 (1.1)
(1.1) – длина кривошипа в м;
– длина кривошипа в м;  - длина кривошипа на чертеже в мм.
- длина кривошипа на чертеже в мм.
 (2.1)
(2.1) -силы реакций в узле А;
-силы реакций в узле А;  - силы инерции звеньев;
- силы инерции звеньев; 
 -силы реакций в узле В.
-силы реакций в узле В. , кг (2.2)
, кг (2.2) - погонная масса звеньев, равная 30 кг/м;
- погонная масса звеньев, равная 30 кг/м;  - длина
- длина  -го звена, м.
-го звена, м. , Н (2.3)
, Н (2.3) , Нм (2.4)
, Нм (2.4) - масса
- масса  -го звена, кг;
-го звена, кг;  -ускорение центра масс
-ускорение центра масс  - момент инерции звена относительно оси, проходящей через его центр тяжести в предположении звена однородным стержнем; кг м2;
- момент инерции звена относительно оси, проходящей через его центр тяжести в предположении звена однородным стержнем; кг м2;  -угловое ускорение
-угловое ускорение 



























 Н
Н м
м м
м Н
Н (2.14)
(2.14) Н
Н (6.1)
(6.1) мм
мм мм
мм (6.2)
(6.2) мм
мм мм
мм (6.3)
(6.3) мм
мм мм
мм (6.4)
(6.4) мм
мм (6.5)
(6.5) мм
мм (6.6)
(6.6)
 (6.7)
(6.7)
 к касательной tt проводим линию зацепления NN. Из центров О1 и О2 опускаем перпендикуляры O1N1 и O2N2 на линию зацепления. Отрезок N1N2– теоретическая линия зацепления.
к касательной tt проводим линию зацепления NN. Из центров О1 и О2 опускаем перпендикуляры O1N1 и O2N2 на линию зацепления. Отрезок N1N2– теоретическая линия зацепления. .
. (6.8)
(6.8)
 (6.9)
(6.9)
 (6.10)
(6.10)
 (6.11)
(6.11)
 (6.12)
(6.12)



 (1.3)
(1.3) -скорость точки полюса;
-скорость точки полюса;  -вращательная составляющая
-вращательная составляющая  вокруг полюса А.
вокруг полюса А.

 - угловая скорость кривошипа, рад /с.
- угловая скорость кривошипа, рад /с.
 (1.4)
(1.4) -отрезок, отображающий скорость точки А на чертеже.
-отрезок, отображающий скорость точки А на чертеже.
 (1.5)
(1.5) (1.6)
(1.6) , т. е. перпендикуляр к звену ВА, а из полюса проводим направление
, т. е. перпендикуляр к звену ВА, а из полюса проводим направление  . На пересечении получим точку
. На пересечении получим точку  . Измеренный отрезок
. Измеренный отрезок  умножаем на масштаб плана скоростей и получим величину скорости точки В.
умножаем на масштаб плана скоростей и получим величину скорости точки В.

 (1.7)
(1.7) (1.8)
(1.8) , т. е. перпендикуляр к звену ВС, а из полюса проводим направление
, т. е. перпендикуляр к звену ВС, а из полюса проводим направление  . На пересечении получим точку с. Измеренный отрезок
. На пересечении получим точку с. Измеренный отрезок  умножаем на масштаб плана скоростей и получим величину скорости точки С.
умножаем на масштаб плана скоростей и получим величину скорости точки С.

 (1.9)
(1.9)

 (1.10)
(1.10) (1.11)
(1.11) (1.12)
(1.12) (1.13)
(1.13)























 (1.14)
(1.14) - ускорение полюса;
- ускорение полюса;  -центростремительное ускорение;
-центростремительное ускорение;  вращательное ускорение.
вращательное ускорение. (1.15)
(1.15)
 (1.16)
(1.16) (1.17)
(1.17) = 0.
= 0. (1.18)
(1.18)
 , (1.19)
, (1.19) - отрезок, отображающий ускорение точки А на плане ускорений
- отрезок, отображающий ускорение точки А на плане ускорений
 (1.20)
(1.20) (1.21)
(1.21)





 .
. (1.22)
(1.22) (1.23)
(1.23) м/с2
м/с2 м/с2
м/с2 .
. 
 .
. м/с2
м/с2 м/с2
м/с2 м/с2
м/с2 м/с2
м/с2 (1.24)
(1.24) м/с2
м/с2
 м/с2
м/с2 м/с2
м/с2