|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОПИСАНИЕ УСТРОЙСТВА И РАБОТЫ ВЕЛОСИПЕДНОГО КРАНАСтр 1 из 6Следующая ⇒
ВВЕДЕНИЕ
Грузоподъемные машины — высокоэффективное средство комплексной механизации и автоматизации подъемно—транспортных, погрузочно-разгрузочных и складских работ. Применение таких машин уменьшает объем использования тяжелых ручных операций и способствует резкому повышению производительности труда. Автоматизация ПТМ позволяет включить ее в поточную линию, а универсальность использования — сделать составным элементом гибкого автоматизированного производства. Курсовое проектирование ПТМ, основываются на практике ранее выполнявшихся графических и расчетных работ по черчению, теории механизмов и машин, деталям машин, призвано выработать навыки проектирования машины в целом. Целью данного курсового проекта является конструирование велосипедного крана. Краны находят широкое применение как средства механизации машиностроительного и других производств. Вместе с этим курсовое проектирование позволяет осветить ряд вопросов, которые будут изучаться в будущих спец дисциплинах. Характер работы в процессе курсового проектирования позволяет решить задачи научно-исследовательской работы
РАСЧЕТ МЕХАНИЗМА ПОДЪЕМА ГРУЗА Расчет механизма подъема производим по методике изложенной в [1]. По грузоподъемности (Q=2,5 т.) выбираем двухкратный полиспаст (a = 3) (рисунок 2).
Рисунок 2 – Кинематическая схема механизма подъема Усилие в канате, набегающем на барабан:
t – число отклоняющих блоков;
Расчетное разрывное усилие в канате при максимальной нагрузке на канат:
где,
Выбираем канат двойной свивки типа ЛК-Р: · Конструкция 6×19(1 + 6 + 6 /6) +1о.с. по ГОСТ 2688 – 80. · Маркировочная группа 1862 МПа · Диаметр каната · Разрывное усилие Канат грузовой (Г), первой марки (I), из проволоки без покрытия (−), правой свивки (−), нераскручивающийся (Н) обозначается:
Канат 12-Г-I-Н-1764 ГОСТ 2688-80. Фактический коэффициент использования каната:
По грузоподъемности (Q=2.5 т.) выбираем крюковую подвеску: Принимаем крюк: заготовка №12 типа А ; заготовка крюка 12А ГОСТ6627-74 при режиме работы М3. Диаметр блока:
где, e − коэффициент выбора диаметра блока (по ПРАВИЛАМ, для режима работы 3М− e =17 Принимаем диаметр блока Расчет барабана Диаметр барабана:
где, e − коэффициент выбора диаметра барабана (по ПРАВИЛАМ, для режима работы 3М− e =17 Принимаем диаметр барабана
Число рабочих витков:
Принимаем
Шаг нарезки:
Рисунок 3- Профиль канавок на барабане
Радиус канавки:
Глубина канавки:
Принимаем h= 3 мм
Длина барабана:
Минимальная толщина стенки литого чугунного барабана
Подбор тормоза
Момент статического сопротивления на валу двигателя при торможении:
Тормозной момент с учетом коэффициента запаса:
Выбираем тормоз ТКП-200, диаметр тормозного шкива – 200 мм, наибольший тормозной момент - 130 Н*м. Выбираем муфту упругую втулочно-пальцевую с тормозными шкивами: Номер муфты – 2, наибольший передаваемый крутящий момент – 500 Н*м, диаметр тормозного шкива – 200 мм. Сопротивление при движении
Dk – диаметр ходового колеса; µ - к-т трения качения (µ=0,6 для ходового колеса и µ=0,25 для вертикальных роликов); f – к-т трения (для шариковых подшипников качения f=0.01) ; d – диаметр подшипников колес; kp = 1,5 – к-т учитывающий трение реборд о рельс; Fст = 780 Н
Когда стрела с полной нагрузкой расположена в направлении движения крана и занимает место над ходовым колесом, то приводное колесо имеет наименьшую нагрузку
34000*0.12>780 4080>780 – условие выполняется
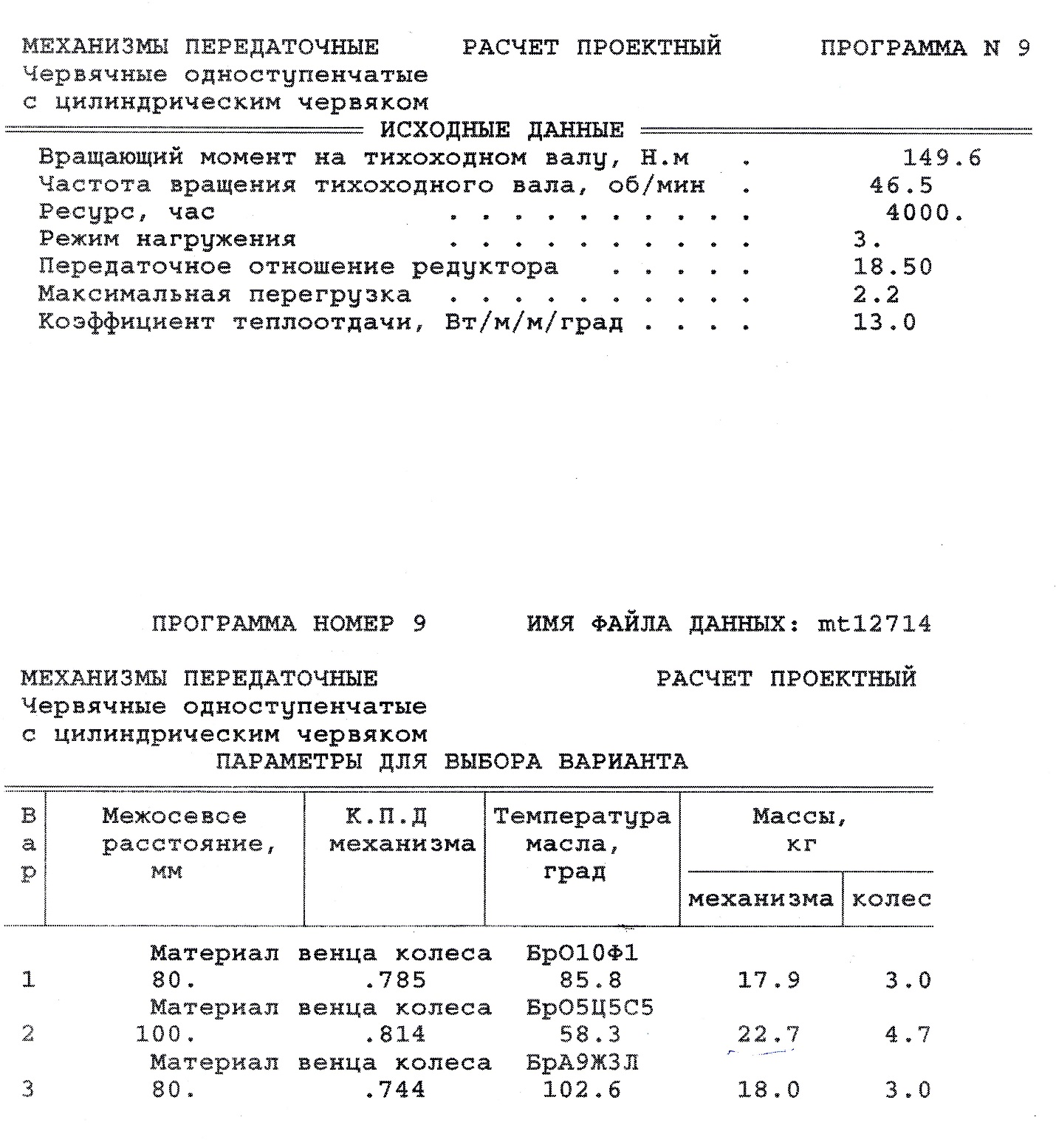
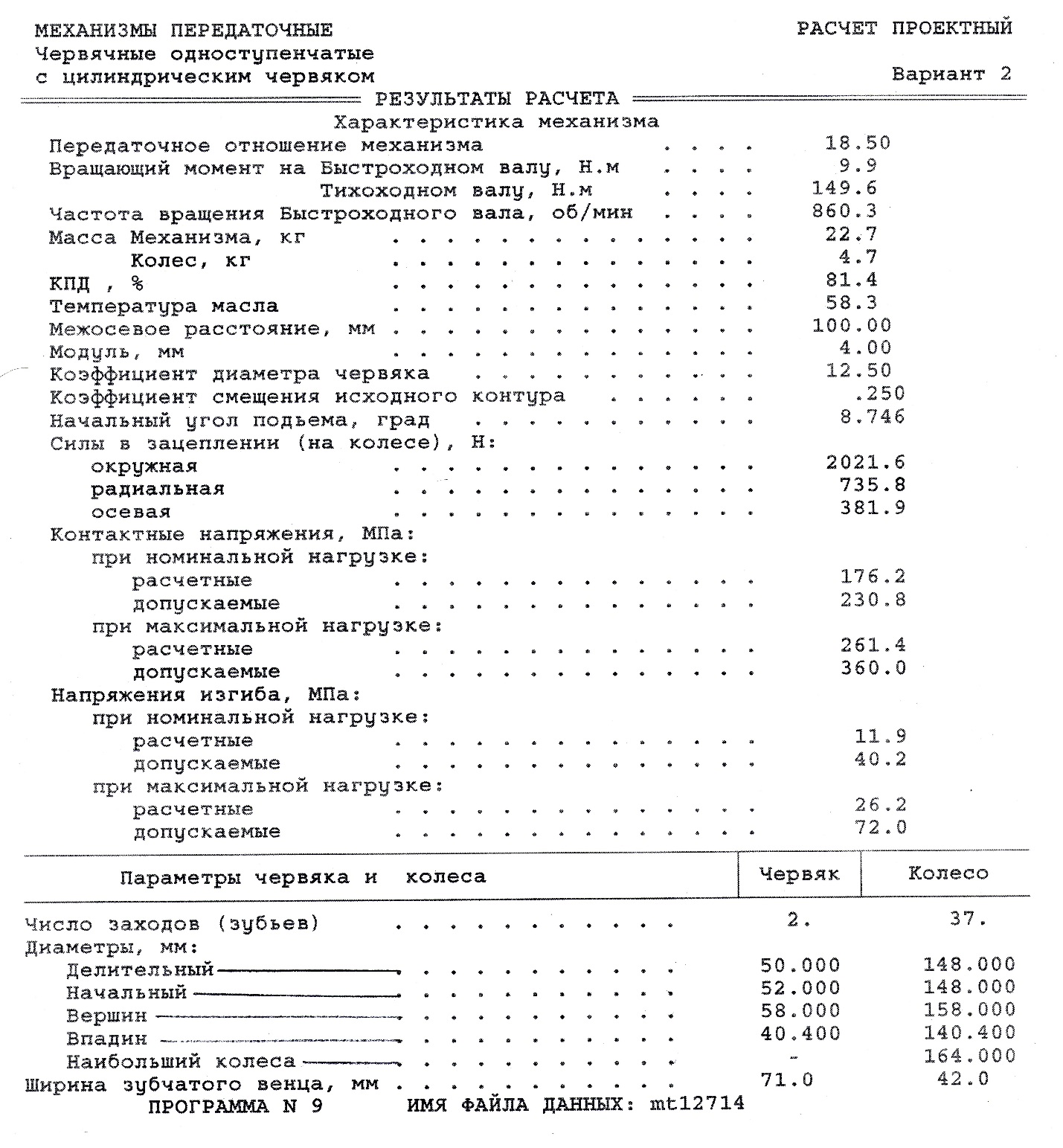
Расчет редуктора РАСЧЕТ МЕТАЛЛОКОНСТРУКЦИИ
Принимаем h=560 мм Ширина сечения стрелы: b » 0,5h = 0,5 Толщина стенки: dст=(1/100...1/160)h = (1/100...1/160)560 = 5,6...3.5мм. Принимаем dст = 10 мм. Подвижная нагрузка от колеса: Определение веса металлоконструкции. Вес стрелы, колонны, противовеса рассчитан в пункте 3.1 Колебания Период собственных колебаний:
с – жесткость, Н/м
Время затухания колебаний:
Проверка прочности
[σ]=140 МПа – допускаемое нормальное напряжение; [σ]`= [σ]*0,6=84 МПа – допускаемое нормальное напряжение для сварных швов;
Стрела: Расчет в данном случае целесообразно начинать с этого узла, как как в опасном сечении подвижной колонны действует наибольший момент в вертикальной плоскости Мв=KQ*Q*L+Gстр*хстр KQ = 1,3 – динамический коэффициент; Мв=1,3*2500*9,81*4+4760*1,6=1,35*108 Н*мм Момент инерции опасного сечения стрелы из п. 4.1 I=4.56*108 мм4 Момент сопротивления изгибу: Wв=2*I/hэкв = 2*106 мм3 Напряжение изгиба σ= Мв/Wв=68 МПа <140 МПа; Статический момент: S=b*δст*(h- δст)/2=280*10*(560-10)/2=7.7*105 мм3 Перерезывающая сила: F= Мв/(2*L/3)=50000 Н Касательное напряжение в сварных швах: τ=F*S/(I*b)=50000*7.7*105/(4,56*108*2*0,7*4)=29 МПа <84 МПа Колонна Момент, изгибающий колонну, равен моменту в стреле Момент сопротивления изгибу колонны Wизг=0,64*Dкол*δкол=0,64*4802*32=4,72*106 мм3 Напряжение изгиба в колонне: σ= Мв*0,45/Wизг=13 МПа; Момент скручивающий колонну: T=0,1*0,45* Мв=6*106 Н*мм Момент сопротивления кручению: Wкр=2* Wизг=9,5*106 мм3 Касательное напряжение в колонне: τ=Т/ Wкр =6*106 /(9,5*106) =0,64 МПа Приведенное напряжение в колонне σпр= Найдем катет шва k, которым колонна приваривается к основанию: τ= Мв / Wшв =0,45*1,35*108/(0,64*4802*0,7*k) <84 МПа Отсюда k=6 мм
ОПОРНЫЕ УЗЛЫ
Нижние опорные узлы(ролики)
Предварительный диаметр ролика: D=1.7* Принимаем D = 140 мм;
Контактное напряжение при точечном контакте:
для стали к-т снк =3600; FHE = Fmax*γ*KHV - эквивалентная нагрузка; γ=0,8…0,92=0,85 – к-т эквивалентности; KHV = 1+2,5*10-3*V=1+2,5*10-3*2,4=1,006 – к-т динамичности; FHE =8*103 Н; m=0.137 – к-т, зависящий от отношения r/D;
Допускаемое напряжение определяют по формуле:
N=tΣ*60*nкол*β=1.1*106 – наработка ролика; tΣ =4000 – машинное время работы, ч; nкол = V/(πD) =5.46 об/мин – частота вращения ролика; β = 0,85 – к-т, учитывающий уменьшение средней частоты вращения в периоды неустановившихся движений.
366<415 МПа – контактные напряжения меньше допустимых, следовательно, ролик подходит.
Расчет гайки
По грузоподъемной силе и режиму работы определяем номер крюка крюковую подвеску и номер крюка [1, лист 5] , а по номеру крюка [1, лист 6] определяем диаметр нарезной части хвостовика крюка d0 и не нарезной части d1./ГОСТ 6627-74/. Крюк № 12 Проверяем крюк в опасном сечении.
где Fg - грузоподъемная сила, Н; dвн - внутренний диаметр хвостовика крюка (dвн= 31,67 мм); [σ] - допускаемое напряжение для крюка, [σ] = (50…60) МПа;
Из расчета на смятие определяем минимально допустимую высоту гайки.
где Fg - грузоподъемная сила, Н; p - шаг резьбы (p=4), мм q - допускаемое давление, q = 30…40 МПа, (принимаем q= 35); dвн - внутренний диаметр хвостовика крюка (dвн=31,67 мм); d0 - диаметр нарезной части хвостовика крюка (d0 =36 мм);
Подбираем стандартную корончатую гайку /3.с.527/ по наружному диаметру резьбы хвостовика так, чтобы для высоты стандартной гайки hг выполнялось условие: Гайка М36 ГОСТ5918-73 Расчет блока
Наименьший допустимый диаметр блока по дну канавки определяется:
где dк - диаметр каната, dк = 12 мм; e - коэффициент, зависящий от типа крана и режима работы, (для тяжёлого режима работы e = 17).
Принимаем Ширина блока выбирается в зависимости от диаметра каната. Вб = 36 мм.
РАСЧЕТ СОЕДИНЕНИЙ 7.1 Расчет шпоночного соединения быстроходный вал редуктора- МУВП (механизм подъема) Сечение под ступицей МУВП: d=18.2 мм, b=4 мм, h=4 мм, t1=2.5 мм, T=15 Н*м. Допускаемое напряжение: [σ]см=120 Мпа. Рабочая длина шпонки:
Конструктивно принимаем: l= 22 мм.
7.2 Расчет шпоночного соединения тихоходный вал редуктора- барабан (механизм подъема) Сечение под ступицей барабана: d=50 мм, b=14 мм, h=9 мм, t1=5.5 мм, T=952,5 Н*м. Допускаемое напряжение: [σ]см=150 Мпа. Рабочая длина шпонки:
Принимаем: l= 63 мм. Охрана окружающей среды Под охраной окружающей среды подразумевается совокупность мероприятий по рациональному использованию, воспроизводству и охране природных ресурсов и предотвращению загрязнения и разрушения окружающей природной среды. К природным ресурсам относят атмосферный воздух, воду, почву, полезные ископаемые, климат, растительность, животный мир. В целях усиления охраны природы принят ряд законов и постановлений, определяющих правила и организацию контроля использования земельных и водных ресурсов, соблюдения частоты атмосферы, а также ответственность за состояние окружающей среды. Конечная цель охраны природы заключается в обеспечении благоприятных условий для существования человека, развития хозяйства, науки и культуры. Объекты применения кранов находятся вблизи полей, лесов, зеленых городских насаждений, гор, рек и водоемов, в связи с чем машинист, выполняя постановления об охране природы, не должен причинять ей вреда во время эксплуатации крана. Кран может быть источником загрязнения окружающей среды. Виды загрязнения окружающей среды различны и многообразны: выбросы в атмосферу выхлопных газов, поступление в воду и попадание на почву отходов от мойки кранов и нефтепродуктов при их заправке и смазке, загрязнение мест эксплуатации кранов, повышение шума при работе машины. Для силовых установок кранов количество загрязняющих веществ, выделяемых в атмосферу, пропорционально расходу топлива. Поэтому экономия топлива одновременно означает сокращение выброса токсичных веществ в атмосферу. При работе грузоподъемных кранов с электроприводом выделяются продукты износа и пыль; имеют место утечки смазочных материалов, шум и вибрации, тепловые выбросы; возникают электромагнитные поля, невидимые при действии электрооборудования. Недопустимы: — сток нечистот с рабочей зоны крана и территории эксплуатационных баз в реки и водоемы без предварительного прохождения их через очистные сооружения; — попадание топливосмазочных материалов и рабочей жидкости на почву при заправке и смазывании кранов; — сжигание почвы вблизи крана открытым огнем, применение открытого огня при техническом обслуживании и пуске в работу кранов. Основные способы ликвидации источников загрязнения и снижения уровня их воздействия могу быть активными и пассивными. К активным способам относятся правильное и своевременное регулирование крановых механизмов, применение рациональных грузовых приемов управления краном, соблюдение и технологически правильное выполнение регламентных работ системы технического обслуживания и ремонта кранов. Пассивными способами содействия охране окружающей среды являются изолирование и герметизация источников жидких загрязнений, своевременный контроль состояния и замена поврежденных уплотнений, экранирование (поглощение и гружение) тепловых источников, электромагнитных полей, шумов и вибрации. Огромный вред растительности и лесному хозяйству причиняют пожары, поэтому нужно строго выполнять меры пожарной безопасности, чтобы исключить возможность возникновения пожара и воздействия на окружающую среду опасных последствий загорания. Топливная и электрическая системы должны быть исправными, элементы систем охлаждения, топливоподачи, гидрооборудования — герметичными. ВВЕДЕНИЕ
Грузоподъемные машины — высокоэффективное средство комплексной механизации и автоматизации подъемно—транспортных, погрузочно-разгрузочных и складских работ. Применение таких машин уменьшает объем использования тяжелых ручных операций и способствует резкому повышению производительности труда. Автоматизация ПТМ позволяет включить ее в поточную линию, а универсальность использования — сделать составным элементом гибкого автоматизированного производства. Курсовое проектирование ПТМ, основываются на практике ранее выполнявшихся графических и расчетных работ по черчению, теории механизмов и машин, деталям машин, призвано выработать навыки проектирования машины в целом. Целью данного курсового проекта является конструирование велосипедного крана. Краны находят широкое применение как средства механизации машиностроительного и других производств. Вместе с этим курсовое проектирование позволяет осветить ряд вопросов, которые будут изучаться в будущих спец дисциплинах. Характер работы в процессе курсового проектирования позволяет решить задачи научно-исследовательской работы
ОПИСАНИЕ УСТРОЙСТВА И РАБОТЫ ВЕЛОСИПЕДНОГО КРАНА Простейшие краны, как и большинство грузоподъёмных машин, до конца XVIII века изготовлялись из деревянных деталей и имели ручной привод. Само название «кран» происходит от нем. Kranich — журавль. К началу XIX века ответственные, быстро изнашивающиеся детали (оси, колёса, захваты) стали делать металлическими. В 20-х гг. XIX века появились первые цельнометаллические подъёмные краны, сначала с ручным, а в 30-е гг. — с механическим приводом. Первый паровой стационарный кран, был запатентован в 1827 г. Велосипедный кран — машина для подъёма и горизонтального перемещения грузов, передвигающаяся по однорельсовому наземному пути. На 2- или 4-осной тележке велосипедного крана установлена колонна, несущая вращающуюся укосину. Устойчивость крана в поперечном направлении обеспечивают реборды ходовых колёс и верхние ролики на вертикальных осях, катящиеся между двумя опорными потолочными балками. Кран при укосине, повёрнутой в направлении движения, занимает мало места; обслуживает по ширине площадь, равную вылету крана по обе стороны пути. Грузоподъёмность до 10 т, вылет стрелы 3—7 м, привод электрический. Велосипедные краны предназначаются для механизации грузоподъёмных и погрузочно-разгрузочных работ в производственных цехах и закрытых складах.
Рисунок 1 — Велосипедный кран: 1 — тележка; 2 — колонна; 3 — укосина; 4 — верхние ролики; 5 — потолочные балки. Кран представляет собой грузоподъемную машину циклического действия. Цикл работы крана состоит из трех этапов: -захват груза; -рабочий ход (перемещение груза, разгрузка); -холостой ход (возврат грузоподъемного механизма в исходное положение). Конструкция крана включает в себя: -несущий элемент; -грузоподъемное устройство, состоящее из гибкого подъемного органа (стального ка ната или цепи) и грузовой лебедки. Для обеспечения безопасности в работе грузоподъемный механизм оснащается различными ограничителями (грузоподъемности, грузового момента, хода грузозахватного органа); -грузозахватный орган, который может быть неавтоматического действия (крюк) или автоматического действия (электромагнит, пневматический присос и др.). Самыми мощными в мире являются 2 крана, установленные на полупогруженном корабле «Микопери-7000» (190 м в длину, 89 м в ширину). Краны принадлежат компании «Оффичине мекканиче реджане»(Италия), спроектированы американской фирмой «Херст энд Деррик», построены итальянской компанией «Монфалконе» и введены в строй 15 декабря 1986 г. Каждый имеет грузоподъёмность 6895 т. Вместе они могут поднять 14 тыс. т. груза. В первые 6 месяцев работы один из них поднял рекордный груз в 5700 т.
|
Последнее изменение этой страницы: 2019-06-09; Просмотров: 483; Нарушение авторского права страницы



 - номинальная грузоподъемность, кг;
- номинальная грузоподъемность, кг; - кратность полиспаста;
- кратность полиспаста;
 ;
;

 .
. − минимальный коэффициент использования каната (по ПРАВИЛАМ, для режима работы 3М− K =5,5)
− минимальный коэффициент использования каната (по ПРАВИЛАМ, для режима работы 3М− K =5,5) = 12 мм,
= 12 мм, = 82000 H.
= 82000 H.

 .
.
 .
.











 . Для того чтобы кран в этом положении мог тронуться с места без буксования приводного колеса, должно быть соблюдено условие:
. Для того чтобы кран в этом положении мог тронуться с места без буксования приводного колеса, должно быть соблюдено условие:

 560 = 280 мм.
560 = 280 мм.







 =13 МПа
=13 МПа  =1.7*
=1.7* 
 ;
;


 ;
;
 ;
; ;
;
 . Принимаем hг = 24 мм.
. Принимаем hг = 24 мм. ;
; 


 мм
мм
 мм
мм мм
мм мм
мм