
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ЭЛЕМЕНТЫ ЭЛЕКТРОННЫХ СХЕМСтр 1 из 33Следующая ⇒
2001 Самойленко А.Ю. Электронные и микропроцессорные средства судовых систем управления: Учебное пособие. – Новороссийск: НГМА, 2001. – 190 с.
В учебном пособии рассматривается принцип действия, устройство и харакетристики основных электронных приборов, типовых электронных преобразователей аналоговых и дискретных сигналов. Изложены принципы построения на электронных и микропроцессорных блоках ряда судовых систем автоматики. Рассмотрены погрешности обработки сигналов, основы технического обслуживания электронных устройств. Пособие предназначено для учащихся судомеханической специальности морских академий и судовых механиков. Перечень сокращений
Содержание
ВВЕДЕНИЕ....................... …………………………………………………………………………….….6 1. ЭЛЕМЕНТЫ ЭЛЕКТРОННЫХ СХЕМ……………………………………………....................... ….8 1.1. Проводимость полупроводников, р-n переход................................................. 8 1.2. Диод, стабилитрон............................................................................................ 14 1.3. Устройство и принцип действия транзистора.................................................. 18 1.4. Схемы включения, параметры и характеристики транзистора...................... 20 1.5. Работа транзистора на нагрузку...................................................................... 23 1.6. Тиристор............................................................................................................ 27 1.7. Принципы управления тиристором................................................................. 30 1.8. Оптоэлектронные приборы. Приборы индикации.......................................... 31 1.9. Пассивные элементы электронных схем.......................................................... 40 1.10. Специальные типы резисторов....................................................................... 45 1.11. Тепловой режим электронных приборов и устройств.................................. 48 2. ПРЕОБРАЗОВАТЕЛИ АНАЛОГОВЫХ СИГНАЛОВ.................................................................... 51 2.1. Принципы построения и характеристики усилителей..................................... 51 2.2. Обратная связь в усилителях............................................................................ 52 2.3. Операционный усилитель................................................................................. 54 2.4. Типовые схемы включения операционных усилителей................................... 57 2.5. Преобразователи сигналов на основе операционных усилителей................. 61 2.6. Активные фильтры............................................................................................ 65 2.7. Нелинейные функциональные преобразователи............................................. 67 2.8. Компараторы.................................................................................................... 68 2.9. Генераторы сигналов. Условия возникновения генерации............................. 70 2.10. Генераторы импульсов................................................................................... 71 2.11. Кварцевые генераторы................................................................................... 74 3. ИСТОЧНИКИ ПИТАНИЯ ЭЛЕКТРОННОЙ АППАРАТУРЫ...................... …………………….75 3.1. Структурные схемы, характеристики источников питания............................ 75 3.2. Выпрямители, фильтры источников питания.................................................. 76 3.3. Стабилизаторы. Защита источников питания.................................................. 79 4. электронные устройства дискретного действия................................................................................ 81 4.1. Общие сведения об устройстах дискретного действия.................................... 81 4.2. Логические функции и логические элементы................................................... 82 4.3. Триггеры........................................................................................................... 88 4.4. Счетчики. Двоичный код.................................................................................. 91 4.5. Регистры. Сложные комбинационные устройства.......................................... 94 4.6. Принципы построения и функционирования микро-ЭВМ.......................... 98 4.7. Память микро-ЭВМ. Средства реального времени...................................... 102 4.8. Структура МПСУ. Адаптеры датчиков и исполнительных механизмов..... 105 4.9. Стандартные интерфейсы периферийных устройств микро-ЭВМ............... 109 4.10. Цифровые измерительные приборы и системы........................................... 111 5. СУДОВЫЕ ЭЛЕКТРОННЫЕ И МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ.................................. 115 5.1. Судовые информационно-измерительные системы. Система АПС.............. 115 5.2. Структурные схемы СЦК............................................................................... 119 5.3. Судовая СЦК "Шипка-М".............................................................................. 121 5.4. Судовая СЦК «Data chief 7 midi». блок SAU 8800....................................... 127 5.5. Торсиометр...................................................................................................... 130 5.6. Информационно диагностические системы судовых дизелей....................... 135 5.7. Системы пожарной сигнализации 137 5.8. Пожарные извещатели и их подключение к лучу СПС................................ 139 5.9. Принципы построения судовых МПСУ......................................................... 146 5.10. Судовая МПСУ “Data chief - 7”.................................................................... 148 6. погрешности и помехи судовых электронных систем........ 151 6.1. Погрешности и способы их снижения............................................................ 151 6.2. Защита электронных устройств от помех...................................................... 156 6.3. Влияние индикаторного канала дизеля на результаты его индицирования 159 7. ОСНОВЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ЭЛЕКТРОННЫХ И МИКРОПРОЦЕССОРНЫХ СИСТЕМ................................................................................. 172 7.1 Общие положения. Эксплуатационная документация................................... 172 7.2. Методы поиска неисправных элементов........................................................ 176 7.3. Определение работоспособности отдельных электронных приборов......... 179 7.4. Принципы замены неисправных электронных приборов и блоков............. 187 ЗАКЛЮЧЕНИЕ...................................................................................................... 189 СПИСОК ЛИТЕРАТУРЫ...................................................................................................................... 190
ВВЕДЕНИЕ Настоящее учебное пособие предназначено для курсантов и студентов, обучающихся по специальности 24.05 «Эксплуатация судовых энергетических установок», а также для судовых механиков, при их дополнительной профессиональной подготовке. Необходимость создания данного пособия вызвана в первую очередь повышением требований к квалификации судовых механиков в области судовых электронных систем управления и контроля, сформулированных в Кодексе подготовки и дипломирования моряков и несения вахты (Кодекс ПДМНВ-78/95). В соответствии с этими требованиями в области электронной аппаратуры и систем управления судовые механики должны обладать надлежащими теоретическими знаниями, их компетентность должна быть достаточной для эксплуатации электронного оборудования управления, включая его проверку, обнаружение неисправностей, ремонт и поддержание в рабочем состоянии. Пособия изложено в форме текстов лекций одноимённого курса, читаемого автором для учащихся специальности 24.05 в НГМА. Это обусловило специфику его построения – сжатое изложение материала, ограниченное применение математических выкладок, в ряде случаев – упрощенное, достаточное лишь для понимания основных процессов изложение принципов действия рассматриваемых элементов и устройств. Вместе с тем, отдельные его разделы изложены более детально и рассчитаны на судовых механиков, имеющих определенный опыт эксплуатации судового электронного оборудования. Пособие предназначено для специалистов эксплуатационного профиля. Поэтому в нём значительное внимание уделено эксплуатационным вопросам - основам технического обслуживания электронных устройств; влиянию органов регулировки на параметры устройств, опасным для электронных приборов режимам работы и т.д. Значительная часть судовых электронных устройств и систем – зарубежного производства, схемы и условные графические обозначения которых не соответствует отечественным стандартам. В этой связи в пособии использованы как отечественные, так и зарубежные обозначения электронных приборов и соответствующая терминология, в том числе - на английском языке. Используемая на судах электроника имеет в основном информационное назначение. Электронные и микропроцессорные устройства предназначены для преобразования электрических сигналов, несущих информацию, используемую непосредственно человеком или для формирования управляющих воздействий. Именно эти вопросы и излагаются в данном пособии. Силовые полупроводниковые преобразователи в настоящем пособии не рассмотрены, изложен лишь принцип действия основного элемента таких преобразователей – тиристора и принципы его управления. Ввиду ограниченного применения в пособии не освещены такие элементы как полевые транзисторы, редко используемые разновидности диодов и ряд других приборов. В разделе 5 пособия рассматриваются информационные и управляющие системы общесудового назначения. Электронные системы управления специального назначения – электронные регуляторы, системы автоматизации электроэнергетической установки, системы ДАУ главного двигателя и другие в пособие не включены. Их структура определяется спецификой алгоритмов управления судовыми объектами, которые изучаются в других учебных курсах. Дополнением к настоящему пособию является лабораторный практикум, реализованный в системе компьютерного моделирования Electronics Workbench. Являясь самостоятельным изданием, он конкретизирует и дополняет теоретический материал, изложенный в настоящем пособии. Автор выражает благодарность Мокину А.В. и Данилькиной Л.В. за помощь, оказанную при подготовке пособия к изданию. Пособие рекомендовано к изданию и использованию в учебном процессе для учащихся специальности 24.05 "Эксплуатация судовых энергетических установок" на заседании кафедры судовой электроавтоматики НГМА "_____"_________2001 г., протокол № ___. Рецензенты:
ЭЛЕМЕНТЫ ЭЛЕКТРОННЫХ СХЕМ N p - + Uобр Рис. 1.6. Обратное включение р-n–перехода
Диод, стабилитрон
Конструктивно диод представляет собою кристалл полупроводника, с выполненным в нем р-n–переходом, помещенный в корпус. Свойства диода практически полностью определяются свойствами р-n–перехода. Условное обозначение диода приведено на рис.1.7. Вывод из р-области кристалла называется анод, из n-области – катод.
а - принятое в России; б, в - другие варианты обозначения.
Рис. 1.7. Условное графическое обозначение диода
Наиболее полно свойства диода отражаются его вольт-амперной характеристикой (ВАХ), изображаемой как для прямого, так и для обратного включений. С увеличением U пр сопротивление запирающего слоя уменьшается. При напряжении более (0,6¸0,8) В запирающий слой практически исчезает и остается только сопротивление п- и р- областей, которое приближенно можно считать постоянным. Поэтому далее характеристика становится почти линейной, а прямой ток I пр резко увеличивается с ростом U пр. Если его не ограничить некоторой величиной I прmax, кристалл перегреется, поскольку с его ростом увеличивается мощность, выделяемая в кристалле: Рпр= I пр U пр. Явление разрушения полупроводника вследствие его перегрева именуется тепловой пробой. При некотором значении обратного напряжения U обрmax возникает электрический пробой p - n-перехода, при котором обратный ток резко возрастает, а сопротивление запирающего слоя резко уменьшается. Электрический пробой, область которого обозначена на рис. 1.8 буквами АБ, является обратимым, т. е. при этом пробое в переходе не происходит необратимых изменений (разрушений структуры вещества). Если не ограничить обратный ток в режиме электрического пробоя, то он переходит в тепловой пробой, приводящий к разрушению кристалла (участок БВ на рис. 1.8). Поэтому, для обычного диода работа на участке АБВ характеристики недопустима, для чего U обр не должно превышать U обрmax. Для улучшения охлаждения, диоды, рассчитанные на токи I пр >1 А как правило устанавливаются на радиаторы. Наиболее мощные диоды, используемые в силовом электрооборудовании, могут дополнительно иметь принудительное воздушное охлаждение. Необходимо отметить, что все полупроводниковые приборы и диоды в частности, имеют малую перегрузочную способность. Вследствие малой массы, кристалл полупроводника способен быстро нагреться до максимальной допускаемой температуры, если выделяемая на нем мощность превышает допустимую. тепловой пробой прибора может длиться всего (10…20) мс. Поэтому недопустимы даже кратковременные перегрузки. В этой связи, для защиты диодов (и других полупроводниковых приборов) от перегрузки или короткого замыкания в цепи нагрузки должны применяться быстродействующие элементы. Обычные автоматические выключатели или плавкие предохранители для этих целей непригодны. Диоды в настоящее время являются самыми мощными из полупроводниковых приборов. Они выпускаются на значения I пр max от десятков миллиампер до нескольких килоампер. Величина U обр max может составлять от десятков вольт до нескольких киловольт. Если напряжение в цепи превышает U обр. max диода то применяется последовательное включение нескольких диодов (рис. 1.9).
Маркировка диодов выполняется по определенной системе. Например, марка диода КД202А, выпущенного в России, расшифровывается так: К – кремний; 2 - выпрямительный средней мощности; 02 – порядковый номер; А – модификация диода по U обр. max или I пр. max. Маркировка диода 1N2047, обозначенного по принятой в США системе, расшифровывается следующим образом: 1 - кол-во p-n переходов; N – знак-разделитель; 2047 – регистрационный номер. Основное назначение диодов – выпрямление переменного тока. Они также широко используются в цепях автоматики для преобразования сигналов.
В режиме пробоя на стабилитроне поддерживается постоянное напряжение U ст (рис. 1.10), при значительном изменении тока через него. Ток ограничивается внешними элементами и не должен превышать I ст. max. Применяется в качестве источника эталонного или опорного напряжения, например, в блоках питания, в цифровых измерительных приборах, при обработке сигналов. Существуют и другие разновидности диодов, обладающие специфическими свойствами: варикап, тунельный диод, и т.д. Их применение в судовой электронике ограничено.
Тиристор Это управляемый диод. Имеет три p - n перехода (рис. 1.17). В настоящее время это наиболее мощный управляемый полупроводниковый прибор.
Тиристор имеет ряд разновидностей. В простейшем случае он имеет два вывода – анод (из крайней р-зоны) и катод (из крайней n-зоны). Такая разновидность называется динистор (рис.1.17). У основной разновидности тиристора (от нее и пошло название этого класса приборов) имеется третий вывод – управляющий электрод (УЭ).
а) б) в) а – структура транзистора; б – обозначение транзистора; в – обозначение динистора.
Рис. 1.17. Структура тиристора и условное обозначение
Для объяснения принципа действия тиристор можно представить в виде эквивалентной схемы, состоящей из двух транзисторов, если его условно разрезать, как показано на рис. 1.18.
Рис. 1.18. Эквивалентная схема тиристора и схема включения
Если последовательно с тиристором включить нагрузку R н и подать питание U пит (рис. 1.18), то при малом напряжении U пит протеканию тока через тиристор препятствует второй, средний p - n переход, который включен в обратном направлении. Существует небольшой обратный ток этого перехода, который вызван собственной проводимостью. Транзисторы схемы включены так, что стараются поддержать друг друга в открытом состоянии, но это возможно, если их суммарный коэффициент усиления больше единицы. Коэффициенты a транзисторов зависят от тока. Примерный вид этой зависимости дан на рис. 1.19. Когда a 1+ a 2 ³ 1, совместное усиление транзисторов становится больше единицы и транзисторы начинают открывать друг друга. Этот процесс идет до полного открытия транзисторов. Чтобы он начался, необходимо увеличить ток тиристора (транзисторов) до некоторого значения. Это достигается увеличением напряжения между анодом и катодом до величины U вкл, чему соответствует точка А на рис. 1.20. После открытия тиристора (транзисторов) практически все U пит приложено к R н (рис. 1.18), а падение напряжения на тиристоре незначительно. Этому режиму соответствует точка С на рис. 1.20. Чтобы закрыть тиристор, необходимо снизить ток через него до некоторого тока выключения I выкл, практически до нуля.
Сигнал управления может подаваться кратковременно, т.к. затем транзисторы поддерживают друг друга в открытом состоянии Закрыть тиристор через управляющий электрод нельзя, для этого необходимо снизить ток в его главной цепи до уровня I выкл. Поэтому тиристор называют однооперационным прибором, т.е. прибором с односторонним управлением. Это его основной недостаток.
Применение тиристоров Тиристоры применяются в управляемых выпрямителях переменного тока для питания двигателей постоянного тока, сварочных аппаратов, преобразователя частоты тока, в качестве бесконтактных коммутационных элементов, т.е. в силовых электроэнергетических устройствах.
Фоторезистор (приёмник). Это полупроводниковый резистор, сопротивление которого уменьшается с ростом освещенности. В конструкции фоторезистора имеется окно, через которое на его фоточувствительный слой попадает свет. Если к фоторезистору подключить источник напряжения, то ток через него I ф будет увеличиваться с ростом падающего на него светового потока Ф (рис. 1.22). В зависимости от освещенности, сопротивление фоторезистора может изменяться в десятки раз, т.е. фоторезистор является весьма чувствительным приемником света. Величина тока I ф зависит также от питающего напряжения и длины светового излучения (рис. 1.23).
Обозначение и характеристики фоторезистора
Спектральная характеристика Фоторезисторы широко используются в судовых системах пожарной сигнализации, применяются в системах автоматики паровых котлов (для контроля наличия факела в котле).
Фотодиод (приёмник). Это полупроводниковый диод, обратный ток через который зависит от освещенности его p-n перехода. Если фотодиод включить в обратном направлении, то с увеличением падающего на него светового потока обратный ток будет возрастать (рис. 1.24).
Рис. 1.24
Он также характеризуется спектральной характеристикой, примерно такого же вида, как у фоторезистора. В отличие от фоторезистора это очень быстродействующий прибор. Фотодиоды могут быть выполнены для работы в видимой части спектра излучения или в инфракрасной области.
Фототранзистор (приёмник).
Фототранзистор обладает наибольшей чувствительностью к световому потоку. Световой поток для фоторезистора выполняет такую же роль, как и управляющий ток базы обычного транзистора – с ростом освещенности увеличивается ток коллектора транзистора.
4. Светодиод (источник света).
В зарубежной технической документации вместо термина "светодиод" обычно используется аббревиатура LED, от английского "light emitted diode". Как источник света светодиод обладает рядом преимуществ: большое быстродействие; неограниченный срок службы, светиться начинает при весьма малой подводимой мощности. Светодиоды могут работать и в инфракрасном спектре (как и фотодиоды). Они широко применяются для построения устройств индикации, мнемосхем, в качестве элементов световой сигнализации и др.
5. Оптрон – полупроводниковый прибор, объединяющий в одной конструкции источник и приёмник света. Электрический сигнал подается к источнику света, обычно это светодиод, в котором преобразуется в световой сигнал, воспринимаемый приемником света. В качестве приемника света могут использоваться фотодиод, фототранзистор и другие, чувствительные к свету электронные приборы (рис. 1.27).
Обозначение оптронов Рис. 1.27
Применение оптронов позволяет обеспечить гальваническое разделение электрических цепей. Например, системы управления, выполненной на электронных приборах с низкими питающими напряжениями и силовой схемы, включающей такое оборудование, как электродвигатели, генераторы и др., питающееся напряжением 220/ 380В и потребляющие большие токи (рис. 1.28).
Приборы индикации. Служат для отображения информации в виде цифр или других знаков в визуальной форме.
Существуют два способа формирования изображения, знака или цифры: - с фиксированным очертанием знака, - изображение заготовлено заранее, - знакосинтезирующие приборы, которые могут быть сегментного или матричного типа. Синтезирующие приборы содержат определенное число элементов индикации, каждый из которых может быть засвечен индивидуально.
Рис. 1.34
Следует отметить, что обычный резистор – один из самых надежных компонентов электронных устройств. В отличие от него, переменный резистор, имеющий подвижный механический контакт, позволяющий изменять его сопротивление (рис. 1.34), является одним из самых ненадежных элементов электронных устройств. Причина – в механическом износе и окислении подвижного контакта. Вторым, наиболее распространенным пассивным элементом электронных схем, является конденсатор. Основным его свойством является способность накапливать электрический разряд, т.е. аккумулировать электрическую энергию. А, отдавая накопленный электрический заряд, т.е. разряжаясь, он способен создать в подключенной к нему внешней цепи ток, постоянно уменьшающийся по мере разряда. Принципиально он состоит из двух обмоток, разъединенных слоем диэлектрика, что отражено в его условном графическом обозначении (рис. 1.35).
а) конденсатор с позиционным номер 7, емкостью 0,1 мкФ; б) конденсатор емкостью 0,1 мкФ, в схеме зарубежного производства; в) электролитический конденсатор емкостью 4,7 мкФ на номинальное напряжение 16В; электролитический (полярный) конденсатор емкостью 4,7 мкФ в схеме зарубежного производства. Рис. 1.35
Основной параметр конденсатора – его номинальная емкость, выражаемая в фарадах. Однако фарада – достаточно большая единица емкости. Конденсатор такой емкости трудно создать, но в этом и нет необходимости. В электронных устройствах используются конденсаторы емкостью от нескольких десятков пикофарад (10-12Ф) до нескольких тысяч микрофарад (10-6Ф). Как и резисторы, конденсаторы характеризуются допуском, выраженным в процентах. Один из важнейших параметров конденсатора – номинальное напряжение. Это такое постоянное напряжение, которое способен выдержать диэлектрик, разделяющий обкладки конденсатора. Если его превысить, то диэлектрик электрически пробивается и через конденсатор будет проходить постоянный ток, т.е. образуется короткое замыкание. Это серьезная авария, наиболее типичная для конденсаторов. Поскольку диэлектрик часто выполняется из органических материалов (бумага, синтетические пленки), то протекающий через него при пробое ток оказывает тепловое действие, идет газообразование, внутри корпуса конденсатора растет давление, что в итоге деформирует его, а в критических случаях разрывает. Следует отметить, что конденсатор – один из самых ненадежных элементов электронных схем. Несмотря на то, что доля конденсаторов в общем количестве компонентов электронных устройств весьма мала, как показывает практика, на них приходится основная масса отказов электронной аппаратуры. Особенно неблагоприятны в этом смысле так называемые электролитические конденсаторы. Изготавливаемые по специальной технологии, они обладают малой массой и габаритными размерами при большой емкости, достигающей десятков тысяч микрофарад. Практически все конденсаторы емкостью от 1 мкФ и выше выпускаются по такой технологии. В отличие от обычных конденсаторов, они являются полярными, т.е. прикладываемое к ним постоянное напряжение должно иметь определенную полярность. На обкладке, обозначенной "+" (рис. 1.33,в) напряжение должно быть положительного знака, относительно другой обкладки. У таких конденсаторов, кроме пробоя диэлектрика, имеет место постепенное, по мере эксплуатации снижение их емкости, вплоть до нуля. Как известно из электротехники, конденсатор проводит переменный ток. Однако электронные устройства автоматики питаются постоянным напряжением и в них конденсаторы работают в основном в режиме "заряд – разряд". Наиболее типичное применение конденсатора – в цепях питания электронных устройств, с целью улучшения качества питания. Весьма часто конденсаторы используются для задержки прохождения сигналов в системах автоматики. Простейшая цепь задержки показана на рис. 1.36.
а) схема цепи задержки; б) временные диаграммы.
Рис. 1.36
В отсутствие входного сигнала U вх конденсатор С разряжен и U вых =0. При скачкообразном появлении U вх (см. рис. 1.36,б) конденсатор начинает заряжаться током, протекающим через R. Напряжение на конденсаторе, т.е. U вых нарастает по экспоненте, стремясь достичь уровня U вх. Время, за которое оно достигнет определенного уровня U ср можно рассматривать как время задержки появления выходного сигнала. Если принять U ср на уровне » 0,6 от U вх, то время задержки составит: t » R × С. Такая цепь способна создать задержку на уровне десятков секунд. Так, если R=100000 Ом=100кОм, а С=100мкФ=100×10-6Ф, то: t » 105 × 100 × 10-6=10с. Резистор и конденсатор с указанными параметрами имеют весьма небольшие размеры и массу. А если вместо постоянного резистора использовать переменный, то время задержки можно регулировать, что и предусмотрено во многих судовых системах автоматики.
Датчики температуры Электронные системы автоматики обрабатывают информацию, поступающую от самых разнообразных датчиков. Часть из них является электронными приборами. Вместе с тем, электронные устройства используются для усиления и преобразования сигналов датчиков. Поэтому целесообразно иметь представление о свойствах некоторых датчиков, ведущих себя в электрических схемах как резисторы, чье сопротивление зависит от прикладываемого к ним неэлектрического воздействия. 1. Терморезисторы. Наибольшую группу таких датчиков составляют терморезисторы, т.е. элементы, чье сопротивление зависит от температуры. Имеются две основные разновидности терморезисторов – металлические и полупроводниковые. Металлические терморезисторы (другое название – термопары сопротивления) выполняются в основном из платины (Pt) и представляют собою проволочный проводник в форме спирали, помещенной в защитный кожух, выполненный в виде щупа. В таком датчике используется известное для металлов явление – с увеличением температуры растет его электрическое сопротивление. Вид характеристики металлического терморезистора приведен на рис. 1.37. Платиновые терморезисторы обладают стабильной характеристикой, работоспособны до » 600оС, широко применяются на судах, однако имеют низкую чувствительность – около 0,4%/оС. Так, если при t =0оС терморезистор имел начальное сопротивление R 0 =100Ом, то при t =100оС оно увеличится на D R =40Ом и составит Rt = R 0 + D R =100+40=140 Ом.
Рис. 1.37
Из-за малой чувствительности для выделения полезного сигнала термометры включаются в четырёхплечий измерительный мост (мост Уитстона), выходной сигнал которого Кроме этого, металлический терморезистор имеет значительную массу и, как следствие, инерционность. Этих недостатков лишены полупроводниковые терморезисторы. Температура сильно влияет на свойства всех полупроводниковых приборов. В данном случае это влияние специально увеличено и доведено до полезного применения.
Имеется две основных разновидности полупроводниковых терморезисторов.
Первая из них называется – термистор.
С увеличением температуры его сопротивление уменьшается на 7-10%/°С. Это самый чувствительный из известных датчиков температуры. Работоспособен до tmax =120-180 ° C (до 380°С отдельные). Этот датчик малоинерционный. Недостаток - большой разброс характеристик при изготовлении (до ±20%). Применяется как датчик температуры в системах пожарной сигнализации, в системах кондиционирования воздуха и ряде других систем.
Его сопротивление увеличивается с увеличением температуры. При некотором значении температуры t ср сопротивление резко возрастает, на несколько порядков. позисторы выпускаются каждый на свою температуру срабатывания. Применяются в системах пожарной сигнализации для контроля температуры обмоток мощных электродвигателей и генераторов. В качестве датчика температуры может использоваться диод. Падение напряжения на диоде в прямом включении зависит от температуры его кристалла. U пр = f ( t ° C ) Чувствительность »2мВ/°С tmax = 150 ¸ 200 ° C.
2. Тензорезисторные датчики. Тензорезистор – сопротивление, изменяющееся при деформации. Могут быть: - металлическими - полупроводниковыми. Электрическое сопротивление металлического провода выражается формулой:
где r- удельное сопротивление, l - длина, S - площадь сечения В металлических тензорезисторах изменяется l и S. Если проводник растягивать – увеличивается l на величину D l и уменьшается S. Поэтому R растет. Рис. 1.41
Применяются константан, нихром, у которых сопротивление не зависит от температуры. При растяжении сопротивление увеличивается, при сжатии – уменьшается:
где К- коэффициент тензочувствительности (К=1,8¸2,5 для металлов). Работают только в пределах упругих деформаций
Мостовая схема включения тензорезисторов и их использование в датчике давления
Полупроводниковые тензорезисторы изготавливаются в основном из кремния. Под воздействием деформации изменяется удельное сопротивление полупроводника. Они обладают гораздо большей чувствительностью – коэффициент тензочувствительности находится на уровне к= ± (30 ¸ 200). Такие тензорезисторы применяются для контроля деформаций судовых конструкций. Тензорезисторы являются составной частью датчиков давления, используются для измерения крутящего момента на гребном валу судна.
3. Варистор. Это полупроводниковый резистор, чье сопротивление зависит от приложенного к нему напряжения. Когда напряжение на варисторе достигает некоторого свойственного ему значения U ср, ток через него резко увеличивается, что свидетельствует о снижении сопротивления. При этом напряжение остается почти постоянным. Варистор используется как элемент защиты полупроводниковых приборов от перенапряжения. Если в схеме рис. 1.43,в отключить питание, то протекающий через катушку индуктивности L ток I снизится.
Рис. 1.43
Это изменение тока, в соответствии с законом электромагнитной индукции приведет к появлению в катушке ЭДС самоиндукции, величина которой может составить сотни вольт. В отсутствие варистора эта ЭДС будет приложена в обратном направлении к диоду и вызовет его пробой. Варистор ограничит эту ЭДС на уровне U ср, что защитит диод.
Рис. 1.44
Рассмотренный механизм теплопередачи справедлив для любых полупроводниковых приборов и блоков.
Рис. 2.7
ОУ имеет один выход и два входа – инвертирующий и неинвертирующий. При подаче входного сигнала на инвертирующий вход, усиленный выходной сигнал будет иметь полярность противоположную входному. Если входной сигнал подается на неинвертирующий вход, то сигнал на выходе совпадает по знаку с входным. Операционный усилитель питается двухполярным напряжением. Схема подачи питания показана на рис. 2.8, где приведено условное обозначение ОУ, часто используемое за рубежом.
Зарубежное обозначение ОУ и схема подключения питания, входных и выходного сигналов Рис. 2.8
Основные параметры ОУ: k ОУ =104 ¸ 106 – коэффициент усиления по напряжению; U пит = ± 15В; U смещ - это напряжение, которое нужно подать на вход ОУ, чтобы его сбалансировать, т.е. обеспечить U вых =0 при U вх =0; у "идеального" ОУ U смещ =0, реально U смещ =2 ¸ 10мВ. U вых =10 ¸ 12В – максимальное выходное напряжение; R вх =сотни кОм ¸ МОм – входное сопротивление; R вых =десятки Ом – выходное сопротивление; f 1 –частота единичного усиления, на которой k ОУ =1 (рис. 2.9). Кроме этого ОУ характеризуется рядом других параметров.
Дифференциальный усилитель. Дифференциальный усилитель – это усилитель, усиливающий разность двух сигналов. Это по существу комбинация инвертирующего и неинвертирующего усилителей, выполненных на одном ОУ. Если задать R ос = R 2 и R 1 = R 3, то после преобразований, аналогичных вышеуказанным величинам получим:
Здесь Такие усилители часто используются для усиления сигналов с измерительного моста.
Активные фильтры
Электрический фильтр – это устройство с заданной частотной характеристикой, т.е. пропускающее сигнал в одном диапазоне частот и не пропускающее в другом. Активные фильтры строятся на ОУ и применяются для ослабления помех, для сглаживания пульсаций, для формирования сигналов требуемой формы Основная характеристика фильтра – амплитудно-частотная Наиболее часто используются фильтры нижних частот (ФНЧ), пропускающие сигналы с частотой до нуля, до некоторой частоты среза (рис. 2.19). Находят применение фильтры верхних частот (ФНЧ) и фильтры полосовые, чьи характеристики даны на рис. 2.19. Компараторы
Это устройства для сравнения двух электрических сигналов. Используются в системах сигнализации и измерения. Кроме сравнения имеет место обычно и усиление сигнала. Выполняются на основе ОУ, либо на транзисторах. Компараторы по своим характеристикам могут быть двух видов: без гистерезиса и с гистерезисом. Схема простейшего компаратора без гистерезиса и его характеристика приведены на рис. 2.23 и 2.24. Выходное напряжение U вх сравнивается с заданным опорным U оп. Они имеют разную полярность. ОУ имеет большой коэффициент усиления. Поэтому незначительное, несколько милливольт превышение U вх над U оп переключение выходного сигнала с максимального отрицательного значения U - вых max на максимальное положительное U + вых max.
На рис. 2.23 показана схема компаратора сигналов одинаковой полярности.
Компараторы без гистерезиса обладают низкой помехоустойчивостью, поэтому возникают ложные включения. У таких компараторов: U сраб = U отп. Компараторы с гистерезисом строятся на основе ОУ с положительной обратной связью (ПОС). У них U сраб ¹ U отп, имеется зона, разделяющая переход из одного состояния в другое. Типичная схема компаратора приведена на рис. 2.26.
Положительная обратная связь создается резисторами R 2 и R 1. При этом коэффициент обратной связи составляет  . .
Из-за наличия напряжения смещения нуля (Uсм0), при отсутствии входного сигнала на выходе ОУ появится напряжение – либо положительное При подключении Uоп характеристика сдвигается на его величину по оси U вх. Гистерезис повышает помехоустойчивость. Если R1 увеличивается, то и Компаратор с гистерезисом имеет собственное название – триггер Шмитта. Триггер Шмитта может быть построен и на транзисторах. Кварцевые генераторы
Рассмотренные ранее генераторы не всегда обеспечивают необходимую стабильность частоты сигнала:
где D f – отклонение частоты от заданного значения f. Генераторы, в которых требуется более высокая стабильность, выполняются на основе кварцевых резонаторов. Такие генераторы используются в: - цифровых измерительных устройствах и системах; - в электронных часах; - Здесь используется прямой и обратный пьезоэффект. Боковые грани пластины кварца металлизируются. При ее деформации возникает разность потенциалов. При приложении электрического напряжения – механическая деформация. Включив кварц в качестве ПОС усилителя можно получить генератор с очень малой нестабильностью частоты:
Фильтры. В качестве фильтров используются реактивные элементы, способные запасать электрическую энергию (С, L).
Чаще всего в БП электронной аппаратуры применяется в качестве фильтра обыкновенный конденсатор большой ёмкости.
Пока мгновенное значение напряжения синусоиды на выходе выпрямителя высокое конденсатор заряжается. Когда напряжение уменьшается, конденсатор отдает ток в нагрузку, за счет чего снижается напряжение в нагрузке (пульсации) DU будет меньше. С очередной полуволной конденсатор подзаряжается. Сглаживание будет тем лучше, чем больше ёмкость конденсатора и сопротивление нагрузки, а также при использовании двухполупериодной и тем более трёхфазной схемы выпрямления.
Варианты условных обозначений ЛЭ
ЛЭ "И/НЕ", "ИЛИ/НЕ" являются универсальными. Используя законы инверсии любую ЛФ можно реализовать не элементах только этого типа. Логические элементы выпускаются сериями. В состав серии может входить несколько десятков типов ЛЭ, как представленных на рис. 4.3, так и более сложных. В пределах серии параметры ЛЭ унифицированы – они имеют одинаковые питающие напряжения, однотипную элементную базу, одинаковые уровни напряжений логических сигналов, быстродействие и т.д. Для построения блоков логики широко используются ЛЭ серии SN74, разработанные в 60-е годы одной из американских фирм. Микросхемы этой серии выпускаются многими фирмами. В нашей стране аналогом данной серии является серия К155 и ее последующее развитие – серии К555, К531, К1533 и т.д. Микросхемы серии SN74 характеризуются параметрами: U пит = +5 В; U "0" £ 0,4 В; U "1" ³ 2,4 В (до 5 В); время переключения из состояния "1" в "0" – на уровне 15¸25 нс. Логические элементы этой серии относятся к транзисторно-транзисторной логике (ТТЛ, англ. TTL), т.к. построены на биполярных транзисторах. Пример маркировки микросхем показан на рис. 4.4.
Рис. 4.4
Маркировка микросхемы рис. 4.4. расшифровывается так: SN – знак фирмы изготовителя; 74 – номер серии; L – с малым энергопотреблением; S – с диодом Шоттки (разновидность диода с высоким быстродействием); 00 – порядковый номер микросхемы в серии; N – пластмассовый корпус. По порядковому номеру 00 из справочника можно определить, что эта микросхема содержит четыре ЛЭ И/НЕ, каждый с двумя входами. Ее аналогом в серии К155 является микросхема К 155ЛА3. Унификация параметров ЛЭ упрощает построение блоков логики. Не требуется никаких промежуточных связующих элементов – выходы ЛЭ можно напрямую соединять со входами последующих элементов. Блок логики пуска дизеля будет иметь вид, показанный на рис. 4.5.
Триггеры
Триггер – элемент памяти, имеющий два возможных устойчивых состояния и способный сохранять любое из них сколь угодно долго пока есть питание. В отличие от логических элементов, выходной сигнал которых полностью определяется комбинацией входных сигналов, выходной сигнал триггера зависит не только от входных, но и от предшествующего состояния триггера. Существует несколько разновидностей триггеров. Они выпускаются в виде интегральных микросхем, но могут быть сделаны и из логических элементов.
RS – триггер. Такой триггер является простейшим. Он используется как самостоятельно, так и в качестве составной части других триггеров. Триггер имеет два входа и два выхода. S – вход установки (set). R – вход сброса (reset). Q – прямой выход.
Сигнал на инверсном выходе всегда противоположен сигналу на прямом выходе.
1. Q =0; 2. Q =1; Вход S служит для установки состояния Q =1; Вход R позволяет установить триггер в состояние: Q =0; Триггер данного типа, ввиду его простоты, часто выполняют на логических элементах И/НЕ. На рис. 4.5 показан вариант построения триггера на элементах ИЛИ/НЕ.
2. D – триггер ( D – delay –задержка). Имеет очень широкое применение - на основе его строятся счетчики, ячейки памяти ЭВМ и другие узлы. Информационный сигнал (0 или 1) записывается в триггер только с поступлением синхронизирующего сигнала.
3. Т – триггер.
Такой триггер называется триггером со счётным входом. Используется для построения счетчиков.
4. JK – триггер – это универсальная микросхема, из неё можно сделать RS, T, D триггер. Триггеры выпускаются в составе серий микросхем куда входят и логические элементы. В пределах серии их параметры унифицированы, поэтому они могут применяться совместно с логическими элементами без согласующих устройств.
Счетчики. Двоичный код
Счетчики строятся на основе Т – триггеров. Предназначены для подсчета числа входных импульсов. Счетчики широко применяются в цифровых измерительных системах, в системах автоматики и т.д.
Входные импульсы поступают на информационный вход счетчика – на вход правого триггера. Перед началом счета на вход сброса подается импульс сброса, приводящий счетчик в исходное нулевое состояние. Для этого каждый триггер имеет отдельный вход сброса R. После сброса на всех выходах счетчика – Q 1, Q 2, Q 4, Q 8 – устанавливается сигнал логической единицы. Работает счетчик следующим образом. По окончании каждого входного импульса (см. рис. 4.10, где входные импульсы пронумерованы) первый триггер переключается в состояние, противоположное предшествующему (сигнал на выходе Q 1). Моменты переключения "привязаны" друг к другу пунктирными линиями. Формируемые таким образом на выходе Q 1 импульсы поступают на вход второго триггера. Он также будет переключаться по срезам импульсов с выхода Q 1, формируя на выходе Q 2 импульсы, поступающие на третий триггер. И т.д.
Память микроЭВМ. Запоминающее устройство управляющей судовой микроЭВМ выполнено на основе микросхем памяти. Каждая из микросхем характеризуется емкостью – числом ячеек памяти. Физические принципы хранения информации различны для разных типов микросхем памяти. Ячейки памяти оперативного запоминающего устройства (англ. RAM), служащего для хранения данных, получаемых в процессе работы (запоминающее устройство данных) строятся по двум принципам: - на основе Д-триггеров; - на основе конденсаторов. Ячейки памяти первого типа ничем не отличаются от рассмотренных ранее параллельных регистров. Микросхемы памяти такого типа являются наиболее быстродействующими, однако их емкость относительно невелика, а стоимость значительна. Их называют статическими ОЗУ. В микросхемах второго типа в качестве запоминающего элемента используется конденсатор. Если его зарядить, то определенное время на нем будет присутствовать напряжение, что можно рассматривать как сохранение сигнала логической единицы. Если конденсатор разряжен, то можно считать, что он хранит сигнал логического нуля. Такие микросхемы обладают очень высокой емкостью, дешевы. Однако, заряженный конденсатор постепенно разряжается и чтобы информация не была потеряна, его нужно периодически подзаряжать (эта операция называется регенерация памяти). Пока идет подзаряд, ячейка памяти не может быть использована, что снижает быстродействие такой памяти. Микросхемы памяти этого типа называют динамическими ОЗУ, Оба типа микросхем ОЗУ позволяют в процессе работы микроЭВМ как записывать в их ячейки памяти информацию, так и считывать. Информация хранится до тех пор, пока есть питание. Ячейки памяти микросхем постоянного запоминающего устройства (ПЗУ, агнл. ROM), служащие для хранения программ (ЗУП), по способу занесения в них информации и ее обновления также имеют ряд разновидностей. В судовых управляющих микроЭВМ применяются в основном два типа ПЗУ: - однократно-программируемые; - перепрограммируемые. Ячейки памяти однократно-программируемого ПЗУ (англ. PROM) в простейшем случае представляют набор электрических перемычек, выполненных из легкоплавкого сплава и включенных по определенной схеме. В исходном состоянии все перемычки целы, т.е. в микросхему ничего не записано. Фирма-разработчик (или изготовитель) судовой микроЭВМ записывают управляющую программу в такую микросхему с помощью программатора (специальный блок, на основе ЭВМ), который пережигает (расплавляет) ненужные перемычки. После программирования часть перемычек удалена и это состояние можно рассматривать как запись логической единицы. Там, где перемычки сохранены, можно считать, что записан логический ноль. Такие микросхемы используются для хранения управляющей программы. Однажды запрограммированная микросхема не может быть использована для повторного программирования, поскольку перемычки восстановить уже нельзя. Ячейки памяти перепрограммируемых ПЗУ (англ. EPROM, EEPROM) допускают многократную очистку и повторную запись программ. Ячейка памяти такого ПЗУ представляет собою зону из проводящего материала, окруженную диэлектриком. При программировании к конкретной ячейке памяти подводится повышенное напряжение, что придает электронам высокую энергию, они преодолевают слой диэлектрика и попадают в область проводника. После снятия повышенного напряжения электроны не в состоянии преодолеть диэлектрический слой и сохраняются в области проводника длительное время – десятки-сотни тысяч часов, независимо от наличия питания микросхемы. Объемный электрический заряд, который получил проводник, можно рассматривать как логическую единицу, записанную в данную ячейку. Очистка микросхемы программируемого ПЗУ осуществляется либо электрическим воздействием (микросхемы типа EEPROM) – подачей повышенного напряжения на ячейку памяти, но другим образом, по сравнению с ее программированием, либо облучением кристалла ПЗУ ультрафиолетом. В последнем случае микросхема имеет стеклянное окошко в корпусе и обозначается как EPROM. Электрически стираемые ПЗУ (EEPROM) более удобны в применении. Кроме управляющей программы в таких ПЗУ могут храниться настроечные параметры систем автоматики – уставки на срабатывание сигнализации, коэффициенты, настроечные параметры резисторов и т.д. Эти параметры в эксплуатации можно менять путем выборочного стирания (электрически) и записи новых значений в требуемые ячейки памяти. В заключение следует отметить, что все рассмотренные типы микросхем ПЗУ не обладают 100% надежностью в плане длительного хранения информации. Продукты пережигания плавких перемычек со временем (годы) претерпевают такие химические изменения, что в конечном итоге приводит к восстановлению перемычек, т.е. к изменению хранимой информации. В микросхемах ПЗУ второго типа из-за неидеальности и старения диэлектрика электроны постепенно (годы) уходят из области проводника, что также приводит к изменению хранимой информации. В практике эксплуатации судовой автоматики, построенной на базе микроЭВМ, имелись случаи отказов по причине нарушения содержимого ПЗУ. Микросхемы ПЗУ в эксплуатации могут легко заменяться. Для этого они, как правило, устанавливаются в специальные контактные панельки (сокеты) на плате микроЭВМ. Эта возможность обеспечивает исключительную универсальность микроЭВМ простой заменой микросхемы ПЗУ, с другой программой, можно заставить ту же ЭВМ решать совершенно другую задачу. Современные судовые системы комплексной автоматизации построены по существу на одинаковых по электрической схеме микроЭВМ, а их специализация определяется исключительно содержимым ПЗУ. Структурные схемы СЦК
По технической реализации СЦК являются электронными информационными устройствами, в которых используются практически все ранее рассмотренные электронные приборы и преобразователи сигналов на их основе. По форме представления информации они могут быть как аналоговыми (относительно старые), так и цифровыми, а чаще – смешанного типа, аналого-цифровые. Применяют два основных варианта построения схем СЦК. Небольшие по объёму контролируемых параметров СЦК используют индивидуальные каналы контроля по каждому датчику (рис. 5.2).
Рис. 5.2
Каждый канал контроля включает в себя датчик Д, измерительный преобразователь ИП сигнала датчика, блок контроля и сигнализации БКС, сравнивающий сигнал с уставкой и обеспечивающий индивидуальную световую сигнализацию. По такой схеме строятся СЦК без применения микроЭВМ. Ее недостатком является большой объем электроники. Более часто используется второй вариант, работающий по принципу обегающего контроля, с общим каналом контроля.
Рис. 5.3
В этой схеме (рис. 5.3) имеется коммутатор К, который по очереди подключает сигнал с каждого канала (т.е. "обегает" каналы) на дальнейшую обработку в БКС и в блоке измерения БИ. Поскольку БКС и БИ необходимы в единственном числе, объем электроники СЦК резко сокращается. Устройство управления, принципиально необходимое в этой схеме, переключает коммутатор, управляет БКС, БИ и общим сигнальным и регистрационным устройством. Быстродействия электронных приборов и блоков достаточно для обеспечения контроля в течение нескольких секунд сотен параметров. По схеме рис. 5.3 строятся современные СЦК на основе микроЭВМ. при этом наиболее сложные блоки БКС, БИ, устройство управления реализуются средствами ЭВМ, а после коммутатора устанавливается АЦП.
5.3. Судовая СЦК "Шипка-М"
Система "Шипка-М" является системой централизованного контроля разработанной в конце 70-х годов в СССР и широко устанавливавшейся на судах отечественной постройки в 80-х годах. Она построена по схеме с индивидуальными каналами контроля. Система контролирует параметры главного двигателя и вспомогательных механизмов судовой энергетической установки (СЭУ). Основные функции системы: - измерение по вызову в цифровой форме до 350 параметров, с представлением на цифровом индикаторе номера, величины и размерности параметра; - контроль достижения любым из параметров уставки; уставка может быть задана как по верхнему, так и по нижнему уровню; - аварийно-предупредительная индивидуальная световая сигнализация по любому из параметров при достижении уставки и обобщенная звуковая сигнализация; - регистрация факта достижения параметром уставки ("выбега") и возвращения его в норму, с фиксацией на бумажной ленте времени выбега и номера параметра. Дополнительные функции системы: - обобщенная аварийно-предупредительная сигнализация (критическая и некритическая) в различных помещениях судна; - контроль с сигнализацией об отсутствии вахтенного в машинном отделении (МО); - блокировка (при необходимости) сигнализации при достижении уставки по любому из параметров; - автоматическое подключение питания системы к судовым аккумуляторам при исчезновении основного питания от судовой сети; - оперативный контроль исправности системы; - временную задержку срабатывания сигнализации; СЦК "Шипка-М" комплектуется унифицированными сборочными блоками, позволяющими реализовать ее функции в различном объеме. Основными сборочными блоками в системе являются: - субблок: состоит из одной или двух печатных плат; это наиболее мелкая сборочная единица, устанавливается в контейнер; - контейнер: содержит субблоки; это сборочная единица, устанавливаемая в прибор, пульт или щит; - блок: содержит платы или субблоки, это законченная сборочная единица, устанавливается непосредственно в прибор; - прибор: наиболее крупная сборочная единица, функционально и конструктивно завершенная, функционирует автономно. В качестве источников информации в системе используются аналоговые датчики и сигнализаторы. Аналоговые датчики давления и температуры, могут иметь выходной сигнал, находящийся в одном из диапазонов: 0…50 мВ; 0…1 В; 0…5 В и т.д. Выходные сигналы датчиков преобразуются в сигнал уровня 0…50 мВ для последующего использования, т.е. нормируются в ИП. Выходным сигналом сигнализатора является электрический контакт – замыкающий или размыкающий.
Структурная схема СЦК "Шипка-М" по функциям
индивидуальной сигнализации и измерения Представление о составе системы дает приводимая на рис. 5.4 структурная схема системы в части, касающейся индивидуальной аварийно-предупредительной сигнализации и измерения. В качестве датчиков температуры ДТ выпускных газов дизеля используются термопары типа ТХК. Для компенсации изменения температуры холодных спаев термопар служит блок термокомпенсации БТК. Сигналы термопар после прохождения БТК усиливаются и линеаризуются (характеристика термопары нелинейная) в блоках согласующего усилителя БСУ, входящих в прибор согласующих усилителей ПСУ. Выходные сигналы БСУ уровня 0…5 В, соответствующие температуре 0…600оС поступают в субблоки СбСТ контейнера контроля температуры 1КтКТ. Здесь сигналы обрабатываются в соответствии с функциями, заложенными в этом блоке. Выходные сигналы уровня 0…50мВ из 1КтКТ поступают на измерение в блок цифровых измерений 1КтЦИ100. Число датчиков ДТ, блоков БСУ и соответствующих им субблоков в 1КтКТ определяется числом цилиндров главного двигателя судна. Сигналы с других аналоговых датчиков Д1…Д18 в зависимости от их уровня непосредственно или через прибор развязки ПР поступают на входы субблоков аналоговой сигнализации СбСА, входящих в состав контейнера 1КтСА. Прибор развязки унифицирует сигнал, приводя его к уровню 0…50 мВ. Максимальное количество субблоков в одном контейнере – 18. Если число параметров, контролируемых аналоговыми датчиками больше, то в состав системы включаются дополнительные контейнеры 1КтСА. В субблоке СбСА сигнал усиливается и сравнивается с уставкой. Если уставка достигнута, то с выдержкой времени (до 40 с) подается индивидуальный световой сигнал (на рис. 5.4 показана лампочка), формируется сигнал на включение обобщенной АПС и сигнал на регистрацию этого отклонения в приборе регистрации выбегов ПРВ. Кроме этого, унифицированный сигнал 0…50 мВ с СбСА поступает на измерение к 1КтЦИ100, если выбрано измерение данного параметра. Выходные сигналы сигнализаторов С в виде состояния электрических контактов поступают на обработку в субблоки дискретной сигнализации СбСД, расположенные в контейнере 1КтСД. В субблоке СбСД с выдержкой времени, формируется индивидуальный световой сигнал (лампочка на рис. 5.4), сигнал обобщенной АПС и регистрации выбега на ПРВ. Сигнал на измерение с СбСД на 1КтЦИ100 не поступает, т.к. информация представлена в дискретной форме. Если число сигнализаторов С превышает максимальное (20) для одного контейнера, в систему включается дополнительные контейнеры 1КтСД. Контейнер 1КтЦИ100 обеспечивает измерение текущего значения любого из параметров. Вызов на измерение осуществляется вручную, заданием номера измеряемого параметра. Номер параметра задается группой переключателей, входящих в субблок вызова на индикацию СбВИ самого контейнера или из внешнего блока вызова на измерение БВИ. Результат измерения высвечивается на цифровом индикаторе субблока представления информации СбПИ (входящем в состав контейнера) в виде трехзначного числа в истинном масштабе, с указанием десятичной точки и размерности параметра. При вызове на измерение из внешнего блока БВИ результат измерения индицируется и на внешнем блоке представления информации БПИ. Контейнер 1КтЦИ100 построен по схеме цифрового измерительного прибора. Входной информационный сигнал 0…50 мВ усиливается, преобразуется в цифровую форму и поступает на цифровой индикатор. В данном блоке использован время-импульсный аналого-цифровой преобразователь. Коммутация сигналов с выходов субблоков СбСА и СбСТ на вход блока цифровых измерений осуществляется электромагнитными реле, имеющимися в каждом из этих субблоков. При определенном наборе переключателей в СбВИ или БВИ срабатывает реле одного из субблоков СбСА или СбСТ, подключая его выходной сигнал на измерение. Оригинален использованный в системе метод идентификации блоком измерения измеряемого параметра. Проблема в том, что из всех субблоков СбСА и СбСТ на вход блока измерения поступают унифицированные информационные сигналы диапазона 0…50 мВ. Это удобно для обработки. Но должна быть дополнительная информация о том, какой физический параметр (давление, температура и т.д.) и в каком диапазоне представляется этим унифицированным сигналом. Эта информация поступает из каждого из субблоков СбСА, СбСТ в форме дополнительного аналогового сигнала (он назван "сигнал шкалы") определенного уровня, параллельно с информационным сигналом. Например, если сигнал шкалы, поступающий от конкретного субблока СбСА находится в диапазоне 624…672 мВ, то информационный сигнал 0…50 мВ с этого же блока трактуется как сигнал давления, изменяющегося в диапазоне 0…2,50 кгс/см2. После получения такого сигнала шкалы, на цифровом индикаторе блока измерения будет высвечена размерность "кгс/см2" и десятичная точка будет засвечена после старшего десятичного разряда. Если при этом уровень информационного сигнала составит 25 мВ, то на цифровом индикаторе будет высвечено: 1,25 кгс/см2. Наиболее типичным блоком системы "Шипка-М" является субблок СбСА. Субблок выполнен на одной печатной плате и условно может быть представлен в виде двух частей: - схема обработки входного сигнала; - схема формирования тревожного сигнала. Упрощенная схема обработки входного сигнала приведена на рис. 5.5. Она выполнена на основе операционных усилителей. Цепь R 1, VD 1, VD 2 служит для ограничения входного сигнала, если он превышает допустимый уровень 50мВ. Конденсатор С1 совместно с R 1 образует фильтр нижних частот для устранения помех. На резисторах R 3, R 2 выполнен делитель напряжения, задающий уставку срабатывания сигнализации. Резисторы R 14, R 16 образуют делитель, задающий сигнал шкалы, необходимый для измерения параметра в КтЦИ100. На R 7, R 4 выполнен делитель, задающий уровень входного сигнала при контроле срабатывания СбСА. На микросхеме DA 1 выполнен дифференциальный усилитель, коэффициент усиления которого определяется R 5, R 8, R 11, R 12. На инвертирующий вход усилителя через перемычку 1 - 2 подается напряжение уставки. Через перемычку 3 - 4 на неинвертирующий вход подается входной сигнал. Такое подключение обеспечивает срабатывание сигнализации в режиме "Больше", т.е. когда сигнал превышает уставку. Если поменять местами подключения сигналов к усилителю, то субблок будет работать в режиме "Меньше" – т.е. сигнализация срабатывает при снижении сигнала ниже уставки. В режиме контроля срабатывания запитывается обмотка реле К1 и его контактами К1:1 на вход усилителя с делителя R 7, R 4 подключается напряжение, заведомо больше уставки, что должно вызвать срабатывание сигнализации. При вызове на измерение параметра, контролируемого данным блоком, запитывается реле К2. При этом, с субблока на вход КтЦИ100 поступает информационный сигнал, через К2:1, и сигнал шкалы – через К2:2. Работа СбСА при этом не нарушается. Усиленный сигнал с DA 1 поступает на вход сравнивающего устройства (регенеративного компаратора), выполненного на DA 2. Если входной сигнал превышает уставку, то на выходе DA 1 имеется напряжение отрицательной полярности. Оно превышает порог срабатывания компаратора, он переключается, и на выходе DA 2 скачком напряжение возрастает до +10 В. Этим напряжением через R 23, R 25 начинает заряжаться конденсатор С12. Время его зарядки, определяющее задержку срабатывания сигнализации, может регулироваться переменным резистором R 25. Напряжение с конденсатор С12 поступает на вход второго регенеративного компаратора, выполненного на DA 3 и имеющего уровень срабатывания около +5 В. При достижении этого уровня напряжение на выходе DA 3 скачком изменяется от +10 В до -10 В. Это напряжение открывает транзистор VT 1, что вызывает срабатывание реле К4. Контакты реле К4 приводят в действие схему формирования тревожного сигнала (здесь не показана, см. / /). Если входное напряжение (отрицательного знака) снизится и станет меньше уставки, знак выходного напряжения DA 1 поменяется на положительный. Это вызовет переключение DA 2. На его выходе установится отрицательное напряжение -10 В. Это напряжение через R 24 и VD 9 быстро перезарядит С12 на другую полярность, т.к. R 24<<( R 23+ R 25). Знак выходного сигнала DA 3 сменится на противоположный, что вызовет запирание VT 1 и отключение К4.
Рис. 5.5
При необходимости заблокировать срабатывание сигнализации, на базу VT 1 через VD 18 подается положительное напряжение, которое запирает VT 1 и делает невозможным его включение независимо от сигнала на выходе DA 3. Цепь R 18, VD 6 обеспечивает выходной сигнал для контроля срабатывания, только когда контакты К2:2 замкнуты.
Ионизационный датчик дыма
Рис. 5.12
Выходной сигнал полупроводникового датчика имеет малую мощность, поэтому в составе пожарного извещателя обязательно имеется усилитель. Две камеры в составе датчика используются для того, чтобы учесть снижение интенсивности радиоактивного излучения во времени. По мере его снижения проводимости камер будут уменьшаться, а их сопротивления расти, но в одинаковой степени. При этом соотношение между R откр и R закр останется неизменным и U вых меняться не будет. Важный отличительной особенностью СПС является способ подключения пожарных извещателей в луче. Вне зависимости от принципа действия, автоматически действующий пожарный извещатель может быть представлен структурной схемой, показанной на рис. 5.13. Признак пожара (температура, дым и т.д.) преобразуется датчиком в плавно изменяющийся электрический сигнал, который в сравнивающем устройстве сопоставляется с уставкой. Выходным сигналом пожарного извещателя является состояние контакта S д, который через резистор R д подключается к лучу. Форма реализации сравнивающего устройства, уставки, и других элементов извещателя могут быть разными. Контакт S д может быть выполнен как в обычном виде, так, например, и в виде транзистора, работающего в режиме открыт/ закрыт. Контакт S д может быть и нормально замкнутым, тогда резистор R д подключается к нему параллельно. Наличие резистора R д принципиально необходимо – контакт S д подключает его в цепь луча при срабатывании и по этому признаку центральный прибор СПС распознает пожар.
Рис. 5.13
С целью экономии, в один луч включается несколько пожарных извещателей, а линию связи луча стремятся выполнить с минимальным количеством жил кабеля. Существует ряд вариантов схем лучей. Простейший двухпроводной луч показан на рис. 5.14. Этот луч не позволяет определить какой конкретно извещатель в нем сработал. Поэтому, число извещателей, подключенных к конкретному лучу ограничено и располагаться они должны в нескольких смежных помещениях судна. Трех- и четырехпроводные лучи обеспечивают большие возможности, но они более сложные и уязвимые.
Рис. 5.14
Контакты S д пожарных извещателей Д в луче включены последовательно и работают на размыкание. Параллельно контактам в каждом извещателе установлен резистор R д. Центральный прибор имеет источник питания, напряжением U пит, обеспечивающий питание луча током I л. В центральном приборе цепь протекания тока луча включена схема контроля тока и сопротивление R вн, ограничивающее ток при коротком замыкании в луче. Обязательным элементом луча являются оконечное сопротивление R о, устанавливаемое в самой дальней по отношению к центральному прибору точке луча. Оно позволяет определить обрыв в луче. Состояние луча – пожар, неисправность и др. СПС распознает по уровню потребляемого им тока. В отсутствие пожара и неисправности луча потребляемый им ток определяется выражением:
Если один их датчиков сработает (пожар), его контакт S д размыкается и в цепь луча добавляется сопротивление R д. Ток луча снизится до величины:
Это снижение тока фиксируется схемой контроля тока центрального прибора, подается оптический сигнал тревоги (лампа HL на рис. 5.14) и звуковой сигнал общесудовой тревоги (рис. 5.10). При обрыве луча При коротком замыкании в луче ток луча возрастает и ограничивается только внутренним сопротивлением R вн:
Таким образом, в различных режимах луч потребляет разные токи, для данной схемы находящиеся в соотношении:
Схема контроля этих токов может быть построена по многим вариантам. По существу она представляет собою несколько сравнивающих устройств (компараторов), каждое со своей уставкой. В относительно старых СПС такая схема строилась на основе электромагнитных реле, в том числе – поляризованных, обладающих высокой чувствительностью. В современных СПС используются электронные элементы. В качестве примера можно привести СПС "Salwico C300". В этой системе применены двухпроводные лучи, в каждой из которых в любой комбинации могут быть включены тепловые (биметаллические), дымовые (ионизационные) и ручные извещатели, а также извещатели, реагирующие на пламя. Их выходные контакты работают на замыкание (см. рис. 5.13). В состоянии готовности ток луча составляет 2,5 мА, при пожаре он возрастает до 50¸100 мА, при коротком замыкании – до уровня более 120 мА. Питание лучей – 24 В. Схемы контроля токов лучей выполнены с широким использованием транзисторов, работающих в ключевом режиме, операционных усилителей, на которых построены компараторы, логических элементов, светодиодов (элементы индикации), тиристоров, которые выполнены по эквивалентной схеме из транзисторов (см. рис. 1.18). Сигналы на звуковую сигнализацию, автоматическое закрытие дверей, включение вентиляции формируются электромагнитным реле, управляемым с помощью транзисторов.
Защита от помех
Помеха – паразитный, нежелательный сигнал, проникающий в цепь обработки полезного сигнала и искажающий результаты его преобразования. В судовых условиях источником помех в основном является силовое электрическое оборудование переменного тока. Особенно мощные помехи возникают в переходных режимах силового электрооборудования - при запуске электродвигателей, переключении коммутационной аппаратуры (реле, контакторы, автоматические выключатели), а также вследствие работы тиристорных устройств. Наиболее уязвимой частью, с позиции проникновения помехи, является кабель, соединяющий источник сигнала (например – датчик), с его приемником (входная цепь электронного блока). Протяженность такого кабеля в судовых условиях может составлять десятки метров, а прокладывается он в ограниченном пространстве машинного отделения, проходя зачастую поблизости от источников помех – генераторов, электродвигателей, силовых кабелей.
Защита кабеля от помех
Рис. 6.4
Для защиты от помехи магнитного происхождения жилы кабеля свиваются между собою с определенным шагом. В этом случае, общий контур, пронизываемый переменным магнитным потоком Ф разбивается на множество маленьких элементарных контуров. В каждом из них наводится ЭДС помехи еп. Однако, в смежных элементарных контурах эти ЭДС из-за свивания жил имеют противоположные направления и компенсируют друг друга, что и устраняет помеху этого вида. Защита от магнитной помехи обеспечивается также прокладкой кабеля в стальных трубах, выполнением корпусов источника сигнала и приемника из стали. Сталь – ферромагнитный материал – является магнитным экраном, через который переменный магнитный поток не проникает. Абсолютно исключить проникновение помех в электронное устройство невозможно. Поэтому, в ряде случаев на входе электронного блока устанавливают электрические фильтры, ослабляющие помеху и пропускающие сигнал. Принципы их построения рассмотрены в разделе …… Обрыв экранирующей оплетки или ее плохой контакт с корпусами источника или приемника сигнала может сделать электронное устройство практически неработоспособным.
Рис. 6.5
Индикаторный канал является колебательным динамическим звеном. Если скачкообразно изменить Рцил, то в нем возникнет переходный процесс – затухающие колебания (рис. 6.6), по завершении которого Рвых=Рцил . Этот процесс описывается дифференциальным уравнением: где Q – добротность индикаторного канала; здесь f с – собственная частота индикаторного канала. Добротность Q характеризует скорость затухания колебаний. Чем она выше, тем медленнее затухают колебания и тем больше их амплитуда. Она зависит от многих, трудно поддающихся учету факторов – от конфигурации канала, изменения его сечения по длине, степени загрязнения канала и т.д. При Q <1 колебания практически отсутствуют, однако для индикаторных каналов двигателей значения Q существенно больше единицы. Рис. 6.6
Собственная частота канала может быть определена по формуле:
где: с – скорость звука в газе, заполняющем канал.
Если объем газовой полости мал, о чем можно судить по выполнению соотношения Скорость звука зависит от состояния газа и может быть определена по известной формуле:
где: g =1,4 – показатель адиабаты; R – универсальная газовая постоянная; Т – температура газа; М – молекулярный вес газа, для воздуха М=29.
Резкое изменение Рцил, вызывающее колебательный процесс в канале, имеет место в начале сгорания топлива в цилиндре, то есть – в конце процесса сжатия воздуха. Температуру воздуха в этой точке можно определить по известной формуле:
где: Та – температура воздуха в начале сжатия; e - степень сжатия. Так, если при e =9,76, Та=313К, М=29, R=8314 Дж/моль×град, то скорость звука в воздухе в конце сжатия составит с=559 м/с. Из формул следует, что собственная частота канала зависит от параметров газа, а те, в свою очередь – от режима работы двигателя. С увеличением нагрузки двигателя растет давление и температура газа и, как следствие, возрастает собственная частота канала. Для оценки влияния индикаторного канала была разработана моделирующая программа для ЭВМ, состоящая из трех модулей. В первом из них моделируется процесс изменения давления в цилиндре Рцил в функции угла поворота коленчатого вала (ПКВ) двигателя. При моделировании возможно изменение частоты вращения двигателя (n), топливоподачи – изменением условного индекса топливных насосов (ИТН) в диапазоне 0 … 1, степени сжатия и других параметров двигателя. Рассчитываемый в функции угла ПКВ процесс Рцил подается во второй модуль, моделирующий индикаторный канал в соответствии с приводимыми выше формулами, и рассчитывающий процесс Рвых. В третьем модуле по процессам Рцил и Рвых рассчитываются показатели рабочего процесса, обычно определяемые в СКРП: среднее индикаторное давление Р mi; максимальное давление Р max, угол ПКВ, на котором действует Р max (a рmax), максимальная скорость нарастания давления На рис. 6.7 в качестве примера представлены результаты моделирования процессов Рцил и Рвых для двигателя с n =214 об/мин при разной топливоподаче. Индикаторный канал имел параметры, взятые по конкретному двигателю: l гк =0,4 м; d гк =0,004 м; l гп =0,002 м; d гп =0,02 м. Добротность принята Q =10. При с=559 м/с собственная частота канала f с =310 Гц. Рассчитанные по процессам рис. 6.7 показатели приведены в табл. 1. Из рис. 6.7 видно, что отличие процесса в цилиндре Рцил (кривая 1) от процесса на выходе газового канала (кривая 2) состоит в появлении колебаний Рвых на участке нарастания давления. Судовым механикам хорошо известна характерная "ступенька" на индикаторных диаграммах малооборотных дизелей, имеющаяся в начале нарастания давления. Фактически это не что иное, как первое колебание давления в канале, которое имеет наибольшую амплитуду и поэтому наиболее заметно (кривая 2). Амплитуды последующих колебаний снижаются и на фоне резкого роста давления в цилиндре они практически незаметны. с n=214 об/мин
1 - Рцил при ИТН=1,0; 2 - Рвых при ИТН=1,0; 3 - Рцил при ИТН=0,6; 4 - Рвых при ИТН=0,6; 5 - Рцил при ИТН=0; 6 - Рвых при ИТН=0. Рис. 6.7
Таблица 1 Показатели рабочего процесса двигателя с n=214 об/мин
При снижении нагрузки двигателя (кривые 3, 4) колебательность возрастает. Это объясняется снижением частоты канала fc. В отсутствие топливоподачи, когда нет резкого нарастания давления, процессы в цилиндре и в индикаторном канале практически совпадают (кривые 5, 6). Характер представленных на рис. 6.7 диаграмм неоднократно подтверждался результатами индицирования реальных судовых дизелей. Причем, значения собственной частоты канала f с, найденные путем обработки реальных индикаторных диаграмм и рассчитанные по вышеприводимым формулам совпадали с погрешностью не более ± 5%. Из данных табл. 1 следует, что показатели рабочего процесса Pmi, Pmax, определенные по процессу P вых практически полностью совпадают с истинными, рассчитанными по процессу P цил. Таким образом, индикаторный канал практически не оказывает влияния на результаты индицирования данного двигателя с n =214 1/мин. На рис. 6.8 представлены результаты моделирования того же дизеля, но при n =1000 1/мин, разных топливоподачах и добротности индикаторного канала.
Результаты моделирования индикаторного процесса двигателя с n=1000 об/мин 1 – P цил при ИТН=1,0; 2 – P вых при ИТН=1,0 и Q =10; 3 – P вых при ИТН=1,0 и Q =2; 4 – P цил при ИТН=0,6; 5 - P вых при ИТН=0,6 и Q =10; 6 - P вых при ИТН=0,6 и Q =2; 7 – P вых при ИТН=0,6 и Q =0,7 ; 8 - P цил при Q =0,7 и ИТН=0; 9 – P вых при Q =0,7 и ИТН=0. Рис. 6.8
Рассчитанные по представленным на рис. 6.8 процессам показатели приведены в табл. 2. Таблица 2 Показатели рабочего процесса двигателя с n=1000 об/мин
0,6 |
1,0 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Процесс | Рцил | Рвых | Рцил | Рвых | Рвых | Рвых | Рцил | Рвых | Рвых | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Q | – | 0,7 | – | 10 | 2 | 0,7 | – | 10 | 2 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Pmi, МПа | 0 | 0,13 | 0,54 | 0,68 | 0,68 | 0,67 | 1,34 | 1,45 | 1,45 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Pmax, МПа | 3,2 | 3,2 | 4,58 | 5,24 | 4,9 | 4,34 | 7,45 | 7,57 | 7,46 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Из рис. 4 и табл. 2 следует, что колебания, возникающие в индикаторном канале значительно искажают сигнал, вносят большую погрешность в определение показателей рабочего процесса. Сильное влияние на характер процесса оказывает добротность канала Q. Оценки рабочего процесса, получаемые по сигналу Рвых на этапе сгорания топлива (Р max, a Pmax,  и т.д.) нельзя считать достоверными.
и т.д.) нельзя считать достоверными.
Вместе с тем, возможность получения достоверного значения Р mi сохраняется. Колебательный процесс в канале имеет место, когда поршень находится в зоне верхней мертвой точки. При этом изменение объема газа незначительно, вследствие чего и работа, совершаемая им в этой зоне вносит малый вклад в общую работу за полный цикл двигателя. Кроме того, вычисление Р mi является процессом интегрирования сигнала Рвых за время цикла. Сигнал Рвых можно рассматривать как сумму Рцил и процесса затухающих колебаний. Можно показать, что интеграл от второй составляющей в пределе стремится к нулю, что и объясняет слабое влияние колебаний на Р mi. Это подтверждается результатами, приводимыми в табл. 2. Так, изменение добротности канала Q в диапазоне 0,7¸10 существенно изменяет вид процесса Рвых (кривые 5, 6, 7 и 2,3), но на численное значение Р mi практически не влияет.
На оценку Р mi индикаторный канал влияет как элемент, вызывающий запаздывание процесса Рвых относительно Рцил. Это хорошо видно из рис. 6.8 – процесс Рвых (кривая 9) смещен относительно Рцил (кривая 8). Время запаздывания и соответствующий ему угол ПКВ однозначно связаны с f с – чем выше f с, тем меньше запаздывание. Вследствие запаздывания, при отключенной топливоподаче, когда теоретически Р mi =0, полученное по Рвых значение Р mi не является нулевым (табл. 2, Р mi =0,13 Мпа). Его следует рассматривать как систематическую ошибку, что подтверждается данными табл. 2. Так, при изменении ИТН в диапазоне 0 … 1,0 значения Р mi, рассчитанные по процессу Рвых, отличаются от истинных, найденных по Рцил, примерно на одинаковую величину – (0,12 … 0,14) МПа. В СКРП эта ошибка автоматически устраняется при настройке. Настройка СКРП выполняется при ИТН=0, на фиксированной частоте вращения. При этом в СКРП поступает процесс Рвых, уже смещенный относительно Рцил. Для этого процесса СКРП принимает Р mi =0, что и устраняет ошибку при определении Р mi на режимах с ИТН>0.
Приводимые выше результаты иллюстрируют влияние индикаторного канала на качественном уровне, применительно к двум частным случаям. В эксплуатации же важно оценить целесообразность применения средств индицирования для конкретного двигателя.
Процесс изменения давления в цилиндре Рцил может быть разложен в ряд Фурье и представлен в виде суммы гармоник (синусоид), являющейся его спектром. Примерный вид спектра процесса Рцил показан на рис. 6.9, где обозначено:
f 1 – частота первой гармоники спектра, равная частоте вращения двигателя;
f 2 =2 f 1, f 3 =3 f 1 … - частоты второй, третьей и т.д. гармоник;
s1, s2, s3 … - амплитуды гармоник;
s 0 – величина постоянной составляющей сигнала.
Спектральные характеристики процессов Рцил и Рвых
 |
а) спектральная характеристика процесса Рцил;
б) амплитудно-частотная характеристика индикаторного канала;
в) спектральная характеристика процесса Рвых.
Рис. 6.9
С позиции пропускания гармонических сигналов разных частот, индикаторный канал характеризуется амплитудно-частотной характеристикой, представленной на рис. 6.9, б, где к – коэффициент передачи канала. Коэффициент передачи равен 1 при f << f с, численно равен добротности Q на частоте f с и резко снижается при f > f с. После прохождения через канал спектр выходного сигнала s вых (рис. 6.9, в) будет отличаться от входного – гармоники с частотами превышающими f с будут ослаблены, а гармоника близкая к f с – усилена. Это и является причиной искажений индикаторной диаграммы.
Однако спектр сигнала Рцил является затухающим – с увеличением номера гармоники ее амплитуда быстро уменьшается (рис. 6.9, а). Как показывает обработка реальных диаграмм, амплитуда гармоники f 20 составляет уже не более (0,5 … 1,0 %) от Р max. Поэтому, чем дальше f с будет отстоять от f 1, тем слабее будет искажаться сигнал в канале, поскольку изменяться будут составляющие, вносящие малый вклад в спектр. По данным автора, для практически неискаженной передачи сигнала через индикаторный канал необходимо, чтобы через него без искажений проходило не менее 20 гармоник. При этом f 20 не должна превышать (0,2…0,3) f с. Ориентируясь на частоту вращения двигателя, это условие можно записать в виде:
f с > (1,1…1,7) n,
где n – частота вращения двигателя, 1/мин.
Это условие выполняется для приведенных на рис. 6.7 процессов – при n =214 1/мин и f с =310 Гц получим f с =1,45 n.
Для процессов, приведенных на рис. 6.8 это условие нарушено – при n =1000 1/мин и fc =310 Гц получим f с =0,31 n.
Условие неискаженной передачи сигнала легко проверить для конкретного двигателя, рассчитав f с по приведенным выше формулам. Если оно выполняется, то средства индицирования могут быть использованы без ограничений на данном двигателе при любом Q.
Если условие неискаженной передачи сигнала существенно нарушено, при этом f с <(0,2…0,3) n, то применение средств индицирования не имеет смысла.
Если частота канала и частота вращения двигателя находятся в соотношении fc =(0,3…1,1) n, то средства индицирования могут использоваться частично – для определения Р mi. Другие оценки процесса (a Р max и т.д.) будут содержать либо большие погрешности, либо являться недостоверными. Лишь при достаточно идентичных индикаторных каналах цилиндров двигателя и одинаковой регулировке их топливной аппаратуры, получаемые значения Р max ("гребенки") можно использовать как показатель относительной неравномерности загрузки цилиндров.
Аналогичное влияние на результаты индицирования оказывают динамические параметры датчика давления СКРП или механического индикатора – оба они являются колебательными системами. Однако частота собственных колебаний датчиков давления, принимаемых в СКРП обычно намного выше собственной частоты индикаторного канала. Поэтому, на фоне влияния индикаторного канала динамические характеристики датчика давления проявляются незначительно. Этого нельзя сказать о механических индикаторах, собственная частота которых сопоставима с частотой индикаторного канала и определяется массой поршенька индикатора и жесткостью его пружины. В эксплуатации пружину индикатора можно менять. Чем жестче пружина, тем выше его собственная частота колебаний и тем меньше будут искажения индикаторной диаграммы. Вместе с тем, размах получаемого изображения индикаторной диаграммы будет меньше, что затруднит ее последующую обработку.
Общие положения. Эксплуатационная документация
Целью технического обслуживания является поддержание электронных устройств в рабочем состоянии. Основными причинами, нарушающими их работоспособность и приводящими к отказам являются:
- превышение предельно-допустимых электрических параметров элементов;
- нарушение теплового режима (перегрев);
- воздействие вибро-климатических факторов.
Электронные устройства практически не требуют профилактических работ. Поэтому, основная задача их технического обслуживания сводится к поиску отказавшего электронного элемента или блока, его замене и к устранению причины, вызвавшей отказ. Замена отказавшего элемента или блока не представляет значительных трудностей при наличии их в запасе. Намного сложнее найти неисправность.
При поиске неисправного элемента помимо квалификации и опыта обслуживающего персонала решающее значение имеет наличие эксплуатационной документации на электронное устройство. В соответствии с действующими в нашей стране стандартами, на любое электронное устройство разрабатывается комплект эксплуатационной документации, в который входит:
- техническое описание;
- инструкция по эксплуатации.
В техническом описании излагается устройство и принцип действия электронной системы, приводятся структурные и принципиальные схемы, перечни элементов и их типы, даётся схема расположения элементов, схема соединений, подключений и т.д. Другими словами - исчерпывающая информация об устройстве электронной системы.
В инструкции по эксплуатации отражены сугубо эксплуатационные вопросы - как ввести в действие электронное устройство, способы его применения, регулировки защиты и т.д.
В инструкции по эксплуатации приводятся также типовые неисправности электронного устройства, их причины и способы устранения. В ряде случаев в инструкции по эксплуатации приводятся таблицы, в которых показаны напряжения на выводах полупроводниковых элементов и в других точках схемы. Эта информация очень важна при поиске отказавшего элемента.
Задача восстановления работоспособности судового электронного оборудования имеет ряд аспектов: технический, экономический, временной и т.д. В каждом конкретном случае их необходимо учитывать в совокупности. Так, например, с позиции снижения затрат на приобретение элементов и блоков для замены отказавших, необходимо вести поиск до уровня наименьшего, элементарного отказавшего компонента, который в принципе может быть заменён (резистор, транзистор, микросхема и т.д.). Однако время и трудозатраты на такой поиск и замену могут быть неприемлемыми. В другом случае, неисправность может быть определена «грубо», на уровне крупного блока системы, причем, гораздо быстрее, чем в первом случае. Вместе с тем, стоимость нового такого блока может быть значительной.
Таким образом, при восстановлении работоспособности электронного устройства необходимо принимать компромиссное решение по глубине поиска, с учетом имеющихся у обслуживающего персонала запасных элементов, инструментальных средств, времени, технической документации и других обстоятельств.
Любую электронную систему можно представить состоящей из конструктивных частей, показанных на рис. 7.1.
Наибольшее количество компонентов содержит центральный электронный блок, где и осуществляется основная обработка электрических сигналов. По отношению к нему все остальные блоки можно считать периферийными.
Периферийные блоки находятся в более жестких условиях и большинство отказов происходит именно в них.
Центральный электронный блок и периферийные блоки как правило имеют различное конструктивное исполнение.
Конструктивная единица электронного блока – печатная плата (модуль).

Функционально-блочная структура электронной системы
Рис. 7.1
Печатные платы характеризуются следующими признаками:
- основной компонент – ИМС; высокая плотность монтажа; отсутствие износа;
- высокое качество монтажа;
- цепи высокоомные, подключаемые для измерений приборы оказывают на них влияние;
- наличие разъемов, малое время на замену; относительно благоприятные внешние условия.
Ремонт электронного блока целесообразен на уровне модулей - заменой печатных плат из ЗИПа. При умеренной плотности монтажа возможна замена таких элементов как транзисторы, диоды и другие дискретные элементы, а также ИМС малой степени интеграции, отказ которых можно надежно идентифицировать в судовых условиях.
Периферийные блоки характеризуются следующими признаками:
- объёмный способ выполнения монтажа (без печатных плат);
- низкая плотность монтажа, доступность для измерений и замены;
- ручная сборка, качество сборки ниже чем в печатных платах;
- смешанная комплектация: дискретные электронные элементы; электрические и электромеханические узлы (реле, трансформаторы, переключатели); ИМС отсутствуют или представлены в малом количестве;
- жесткие условия работы;
- изнашиваемость, в том числе механическая, ряда компонентов (реле, лампы, изоляция, датчики, кнопки, переключатели, переменные резисторы).
Ремонт таких блоков целесообразен и возможен на уровне отдельных элементов, а не модулей
При поиске отказавшего элемента (блока) необходимо:
- использовать имеющиеся в электронной системе средства встроенного контроля;
- изучить техническую документацию, особенно рекомендации по устранению типовых неисправностей и следовать им;
- если рекомендации не дали результата, вести поиск в направлении от сложного блока к простому (система – блок – модуль – элемент), применяя изложенные ниже методы.
Рекомендуется следующий порядок поиска неисправного блока, от наименее, к наиболее надежному:
- блок питания и средства защиты;
- кабели и электрические соединители (разъемы);
- датчики и исполнительные механизмы (ИМ);
- средства коммутации, сигнализации, индикации;
- центральный электронный блок и его модули.
Резисторы.
Проверяются с помощью омметра путем измерения сопротивления. Для обычного резистора измеренное значение должно соответствовать номинальному сопротивлению резистора, с учетом его допуска и погрешности омметра.
В переменном резисторе проверяется плавное изменение его сопротивления при перемещении движка резистора.
Измеренное сопротивление терморезистора должно соответствовать его номинальному сопротивлению при температуре, для которой оно нормировано. При нагреве сопротивление терморезистора должно изменяться в соответствии с его характеристикой.
Сопротивление фоторезистора должно уменьшаться при засветке его лампой 40 Вт с расстояния 0,6 м на 2¸3 порядка, по сравнению с затемненным состоянием. Темновое сопротивление, как правило, должно составлять не менее 1 МОм.
Конденсаторы.
Состояние конденсатора емкостью более нескольких микрофарад можно проверить омметром на основе стрелочного прибора (цифровой не пригоден). Типичными его состояниями являются:
- исправное состояние;
- обрыв или потеря емкости, что эквивалентно;
- короткое замыкание;
- наличие "утечки".
Состояние "утечка" характеризуется тем, что конденсатор начинает пропускать постоянный ток. Это свидетельствует об ухудшении качества диэлектрика конденсатора и проявляется в течение его эксплуатации.
При подключении к омметру конденсатор заряжается от источника питания. По характеру протекания этого процесса, отображаемому движением стрелки омметра, можно судить о состоянии конденсатора. До подключения конденсатора стрелка омметра находится в крайнем левом положении (1), что по шкале омметра соответствует бесконечно большому сопротивлению (¥) (Рис. 7.2).

Проверка конденсатора
Рис. 7.2
При подключении исправного конденсатора стрелка резко переместится к крайней правой отметке шкалы, которой соответствует значение 0 Ом (положение 2). Это происходит потому, что конденсатор разряжен и в первый момент времени через него протекает максимально возможный ток заряда I зар. Раз ток максимальный, омметр "считает", что к нему подключен элемент, чье сопротивление равно нулю. По мере заряда конденсатора ток заряда будет уменьшаться, поэтому стрелка омметра будет плавно, все более замедляясь, перемещаться из положения 2 в положение 1.
Если в конденсаторе обрыв или он потерял емкость, стрелка омметра не сместится с положения 1 (¥). При коротком замыкании стрелка омметра устанавливается в положении 2.
При наличии утечки, в своем возвратном движении стрелка не дойдет до положения 1 (¥), а установится в некотором положении 3, которому соответствует сопротивление утечки. В идеале оно должно быть бесконечно большим, а реально не должно быть менее нескольких сотен килоом, в противном случае конденсатор считается непригодным к использованию.
Если емкость конденсатора менее нескольких микрофарад, вследствие инерционности стрелки омметра труднее распознать обрыв и исправное состояние, поскольку заряд протекает быстрее. Однако короткое замыкание и наличие утечки определить возможно.
Диод.
Типичными отказами диода являются короткое замыкание (сплавление кристалла) и обрыв (сгорание кристалла). Исправное состояние и оба вида отказов могут быть определены омметром.
Для проверки диода выполняются два замера сопротивления – в прямом включении (R пр) и в обратном (R обр). При прямом включении анод диода подключается к положительному зажиму омметра, а катод к отрицательному. При обратном включении – наоборот. Тем самым фактически создаются схемы рис.1.6 и рис. 1.7, где в качестве U пр и U обр используется источник постоянного тока омметра.
В исправном диоде R пр << R обр. Для маломощных кремниевых диодов, применяемых в блоках автоматики, прямое сопротивление составляет сотни ом, обратное – сотни килоом и более. Для диодов более мощных, рассчитанных на токи от нескольких ампер и более, R пр может составить десятки ом. При обрыве, в обоих включениях диода сопротивление будет близко к бесконечности. При коротком замыкании R пр » R обр и может составлять от нескольких ом до сотен ом.
Транзистор.
Транзистор может быть проверен двумя способами:
- омметром, при этом транзистор должен быть извлечен из схемы;
- вольтметром, транзистор находится в схеме, в рабочем режиме.
Для проверки по первому способу транзистор представляется эквивалентной схемой из двух диодов – ведь в нем создано два встречно включенных р-n-перехода. На рис.7.3 показана эквивалентная схема для проверки n-p-n-транзистора. В эквивалентной схеме n-p-n-транзистора диоды будут развернуты на 180о. Транзистор считается исправным, если исправны диоды, составляющие его эквивалентную схему. Диоды проверяются омметром аналогично вышеописанной методике. Всего делается 6 замеров. Четыре замера необходимы для проверки собственно диодов. Два последующих замера выполняются при подключении омметра между коллектором и эмиттером транзистора, при разных полярностях подключения. В этих замерах измеренные значения должны быть такого же порядка, как и R обр диода, поскольку при любой полярности подключения один из диодов будет в обратном включении.

Транзистор и его эквивалентная схема для проверки
Рис. 7.3
Виды отказов транзистора аналогичны диодам. Аналогично интерпретируют и результаты проверки.
Во втором способе проверки транзистор находится под питанием. Исправный транзистор должен реагировать на изменение входного сигнала. Для проверки этой реакции используется вольтметр. В большинстве случаев транзистор включается по схеме с общим эмиттером. На рис. 7.4 показано подключение вольтметра на примере фрагмента схемы с транзистором. Входной сигнал U вх поступает от предшествующей части схемы через резистор R вх. К последующей схеме выходной сигнал обычно подается также через резистор, обозначенный R вых. Сначала вольтметр подключается к входной цепи транзистора, между базой и эмиттером. Если это напряжение U бэ » 0,6 ¸ 0,8 В, т.е. от предшествующей схемы поступает U вх, то транзистор должен быть открыт. При этом вольтметр, подключенный между коллектором и эмиттером транзистора (см. рис. 7.4) должен показать U кэ » 0 В. Когда входной сигнал отсутствует, то U бэ =0 В, транзистор должен быть закрыт и подключенный к его выходу вольтметр должен показать напряжение, близкое к напряжению питания U пит.

Проверка транзистора по его реакции на входной сигнал
Рис. 7.4
Если входной сигнал длительное время остается неизмененным, процедуру проверки можно ускорить. Чтобы проверить закрывается ли транзистор, можно временно закоротить перемычкой (на рис. 7.4 показана пунктиром) его базу и эмиттер, т.е. сделать U бэ =0 В. На предшествующую схему это существенно не повлияет, поскольку ток, отбираемый от нее будет ограничен R вх. Для поверки способности транзистора открываться, между базой и положительным проводом питания + U пит следует временно подключить резистор R б, величина которого R б » (10 ¸ 20) R к. При этом через R б от источника питания будет подаваться ток в базу транзистора, что приведет к открыванию последнего.
Операционный усилитель.
Операционный усилитель может быть проверен только в рабочем режиме, под питанием, путем измерения сигналов вольтметром. Его работоспособное состояние можно сформулировать следующим образом: выходной сигнал схемы на ОУ должен соответствовать входному, с учетом коэффициента усиления схемы. Например, если ОУ включен по схеме инвертирующего усилителя (см. рис. 2.10) и R 1 =2 кОм, R ос =10 кОм, а U вх = +0,2 В, то его выходной сигнал должен быть U вых = - 1,0 В. Это следует из свойств данной схемы, коэффициент усиления которой  , а полярность выходного сигнала противоположна входному.
, а полярность выходного сигнала противоположна входному.
Логические элементы.
Также как и ОУ, работоспособность логического элемента может быть проверена только под питанием, измерением его сигналов. Работоспособное состояние логического элемента можно сформулировать следующим образом: выходной сигнал должен соответствовать входному, с учетом логики работы элемента для всех возможных комбинаций подачи сигналов. При этом, как входные логические сигналы, так и выходной должны соответствовать уровням напряжений, выражающих логический ноль или единицу.

Проверка работоспособности логических элементов
Рис. 7.5
Например, проверяются логические элементы серии 74, показанные на рис. 7.5. Для этого вольтметром измеряются напряжения на входах и выходах элементов. Для схемы рис. 7.5,а напряжение на верхнем входе равно 3,7 В, что трактуется как сигнал логической "1". На нижнем входе – 0,2 В, что соответствует уровню логического "0". При такой комбинации входных сигналов на выходе элемента И/НЕ должен присутствовать сигнал  , выраженный уровнем напряжения не менее 2,4 В. Реально же на выходе имеется сигнал логического "0" (0,1 В), что свидетельствует о неисправности элемента.
, выраженный уровнем напряжения не менее 2,4 В. Реально же на выходе имеется сигнал логического "0" (0,1 В), что свидетельствует о неисправности элемента.
Логический элемент ИЛИ/НЕ на рис. 7.5,б также неисправен, поскольку его выходное напряжение (1,5 В) не соответствует ни логическому "0", ни логической "1" для микросхем данной серии.
Исправным возможно является логический элемент И, показанный на рис. 7.5,в. – его выходной сигнал соответствует входным, ибо 1*1=1. Однако для окончательного вывода следует оценить его выходной сигнал при всех вариантах подачи входных сигналов.
Аналогичный подход применяется при проверке более сложных, чем логический элемент функциональных узлов (ИМС) дискретного действия – счетчиков, дешифраторов и т.д.
При выполнении большого числа проверок вместо вольтметра удобнее использовать более простое средство контроля – логический пробник. Простейший логический пробник – светодиод (рис. 7.6) с ограничивающим его ток резистором R огр (300¸600 Ом). Один вывод пробника подключается к общему проводу схемы, а второй является щупом, который устанавливается в контролируемую точку схемы. Напряжение логической "1" микросхем серии 74 (³2,4 В) достаточно для того, чтобы вызвать свечение светодиода. При логическом нуле напряжение слишком низкое и светодиод погашен.

Простейший логический пробник
Рис. 7.6
2001
Самойленко А.Ю. Электронные и микропроцессорные средства судовых систем управления: Учебное пособие. – Новороссийск: НГМА, 2001. – 190 с.
В учебном пособии рассматривается принцип действия, устройство и харакетристики основных электронных приборов, типовых электронных преобразователей аналоговых и дискретных сигналов. Изложены принципы построения на электронных и микропроцессорных блоках ряда судовых систем автоматики. Рассмотрены погрешности обработки сигналов, основы технического обслуживания электронных устройств.
Пособие предназначено для учащихся судомеханической специальности морских академий и судовых механиков.
Перечень сокращений
| АПС | - аварийно-предупредительная сигнализация; |
| АЦП | - аналого-цифровой преобразователь; |
| АЧХ | - амплитудно-частотная характеристика; |
| БИС | - большая интегральная микросхема; |
| БП | - блок питания; |
| ВАХ | - вольт-амперная характеристика; |
| ДАУ | - дистанционное автоматизированное управление; |
| ЗИП | - запас и принадлежности; |
| ИИС | - информационно-измерительная система; |
| ИМ | - исполнительный механизм; |
| ИМС | - интегральная микросхема; |
| ЛЭ | - логический элемент; |
| МО | - машинное отделение; |
| МПСУ | - микропроцессорная система управления; |
| ОБ | - общая база; |
| ОЗУ | - оперативное запоминающее устройство; |
| ОК | - общий коллектор; |
| ООС | - отрицательная обратная связь; |
| ОУ | - операционный усилитель; |
| ОЭ | - общий эмиттер; |
| ПЗУ | - постоянное запоминающее устройство; |
| ПКВ | - поворот коленчатого вала; |
| ПОС | - положительная обратная связь; |
| СКРП | - система контроля рабочего процесса; |
| СПС | - система пожарной сигнализации; |
| СУ | - система управления; |
| СЦК | - система централизованного контроля; |
| СЭУ | - судовая энергетическая установка; |
| УЭ | - управляющий электрод; |
| ФВЧ | - фильтр верхних частот; |
| ФНЧ | - фильтр нижних частот; |
| ЦАП | - цифро-аналоговый преобразователь; |
| ЦПУ | - центральный пост управления; |
| ЭДС | - электродвижущая сила |
Содержание
ВВЕДЕНИЕ....................... …………………………………………………………………………….….6
1. ЭЛЕМЕНТЫ ЭЛЕКТРОННЫХ СХЕМ……………………………………………....................... ….8
1.1. Проводимость полупроводников, р-n переход................................................. 8
1.2. Диод, стабилитрон............................................................................................ 14
1.3. Устройство и принцип действия транзистора.................................................. 18
1.4. Схемы включения, параметры и характеристики транзистора...................... 20
1.5. Работа транзистора на нагрузку...................................................................... 23
1.6. Тиристор............................................................................................................ 27
1.7. Принципы управления тиристором................................................................. 30
1.8. Оптоэлектронные приборы. Приборы индикации.......................................... 31
1.9. Пассивные элементы электронных схем.......................................................... 40
1.10. Специальные типы резисторов....................................................................... 45
1.11. Тепловой режим электронных приборов и устройств.................................. 48
2. ПРЕОБРАЗОВАТЕЛИ АНАЛОГОВЫХ СИГНАЛОВ.................................................................... 51
2.1. Принципы построения и характеристики усилителей..................................... 51
2.2. Обратная связь в усилителях............................................................................ 52
2.3. Операционный усилитель................................................................................. 54
2.4. Типовые схемы включения операционных усилителей................................... 57
2.5. Преобразователи сигналов на основе операционных усилителей................. 61
2.6. Активные фильтры............................................................................................ 65
2.7. Нелинейные функциональные преобразователи............................................. 67
2.8. Компараторы.................................................................................................... 68
2.9. Генераторы сигналов. Условия возникновения генерации............................. 70
2.10. Генераторы импульсов................................................................................... 71
2.11. Кварцевые генераторы................................................................................... 74
3. ИСТОЧНИКИ ПИТАНИЯ ЭЛЕКТРОННОЙ АППАРАТУРЫ...................... …………………….75
3.1. Структурные схемы, характеристики источников питания............................ 75
3.2. Выпрямители, фильтры источников питания.................................................. 76
3.3. Стабилизаторы. Защита источников питания.................................................. 79
4. электронные устройства дискретного действия................................................................................ 81
4.1. Общие сведения об устройстах дискретного действия.................................... 81
4.2. Логические функции и логические элементы................................................... 82
4.3. Триггеры........................................................................................................... 88
4.4. Счетчики. Двоичный код.................................................................................. 91
4.5. Регистры. Сложные комбинационные устройства.......................................... 94
4.6. Принципы построения и функционирования микро-ЭВМ.......................... 98
4.7. Память микро-ЭВМ. Средства реального времени...................................... 102
4.8. Структура МПСУ. Адаптеры датчиков и исполнительных механизмов..... 105
4.9. Стандартные интерфейсы периферийных устройств микро-ЭВМ............... 109
4.10. Цифровые измерительные приборы и системы........................................... 111
5. СУДОВЫЕ ЭЛЕКТРОННЫЕ И МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ.................................. 115
5.1. Судовые информационно-измерительные системы. Система АПС.............. 115
5.2. Структурные схемы СЦК............................................................................... 119
5.3. Судовая СЦК "Шипка-М".............................................................................. 121
5.4. Судовая СЦК «Data chief 7 midi». блок SAU 8800....................................... 127
5.5. Торсиометр...................................................................................................... 130
5.6. Информационно диагностические системы судовых дизелей....................... 135
5.7. Системы пожарной сигнализации 137
5.8. Пожарные извещатели и их подключение к лучу СПС................................ 139
5.9. Принципы построения судовых МПСУ......................................................... 146
5.10. Судовая МПСУ “Data chief - 7”.................................................................... 148
6. погрешности и помехи судовых электронных систем........ 151
6.1. Погрешности и способы их снижения............................................................ 151
6.2. Защита электронных устройств от помех...................................................... 156
6.3. Влияние индикаторного канала дизеля на результаты его индицирования 159
7. ОСНОВЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ЭЛЕКТРОННЫХ И МИКРОПРОЦЕССОРНЫХ СИСТЕМ................................................................................. 172
7.1 Общие положения. Эксплуатационная документация................................... 172
7.2. Методы поиска неисправных элементов........................................................ 176
7.3. Определение работоспособности отдельных электронных приборов......... 179
7.4. Принципы замены неисправных электронных приборов и блоков............. 187
ЗАКЛЮЧЕНИЕ...................................................................................................... 189
СПИСОК ЛИТЕРАТУРЫ...................................................................................................................... 190
ВВЕДЕНИЕ
Настоящее учебное пособие предназначено для курсантов и студентов, обучающихся по специальности 24.05 «Эксплуатация судовых энергетических установок», а также для судовых механиков, при их дополнительной профессиональной подготовке.
Необходимость создания данного пособия вызвана в первую очередь повышением требований к квалификации судовых механиков в области судовых электронных систем управления и контроля, сформулированных в Кодексе подготовки и дипломирования моряков и несения вахты (Кодекс ПДМНВ-78/95). В соответствии с этими требованиями в области электронной аппаратуры и систем управления судовые механики должны обладать надлежащими теоретическими знаниями, их компетентность должна быть достаточной для эксплуатации электронного оборудования управления, включая его проверку, обнаружение неисправностей, ремонт и поддержание в рабочем состоянии.
Пособия изложено в форме текстов лекций одноимённого курса, читаемого автором для учащихся специальности 24.05 в НГМА. Это обусловило специфику его построения – сжатое изложение материала, ограниченное применение математических выкладок, в ряде случаев – упрощенное, достаточное лишь для понимания основных процессов изложение принципов действия рассматриваемых элементов и устройств. Вместе с тем, отдельные его разделы изложены более детально и рассчитаны на судовых механиков, имеющих определенный опыт эксплуатации судового электронного оборудования.
Пособие предназначено для специалистов эксплуатационного профиля. Поэтому в нём значительное внимание уделено эксплуатационным вопросам - основам технического обслуживания электронных устройств; влиянию органов регулировки на параметры устройств, опасным для электронных приборов режимам работы и т.д.
Значительная часть судовых электронных устройств и систем – зарубежного производства, схемы и условные графические обозначения которых не соответствует отечественным стандартам. В этой связи в пособии использованы как отечественные, так и зарубежные обозначения электронных приборов и соответствующая терминология, в том числе - на английском языке.
Используемая на судах электроника имеет в основном информационное назначение. Электронные и микропроцессорные устройства предназначены для преобразования электрических сигналов, несущих информацию, используемую непосредственно человеком или для формирования управляющих воздействий. Именно эти вопросы и излагаются в данном пособии. Силовые полупроводниковые преобразователи в настоящем пособии не рассмотрены, изложен лишь принцип действия основного элемента таких преобразователей – тиристора и принципы его управления. Ввиду ограниченного применения в пособии не освещены такие элементы как полевые транзисторы, редко используемые разновидности диодов и ряд других приборов.
В разделе 5 пособия рассматриваются информационные и управляющие системы общесудового назначения. Электронные системы управления специального назначения – электронные регуляторы, системы автоматизации электроэнергетической установки, системы ДАУ главного двигателя и другие в пособие не включены. Их структура определяется спецификой алгоритмов управления судовыми объектами, которые изучаются в других учебных курсах.
Дополнением к настоящему пособию является лабораторный практикум, реализованный в системе компьютерного моделирования Electronics Workbench. Являясь самостоятельным изданием, он конкретизирует и дополняет теоретический материал, изложенный в настоящем пособии.
Автор выражает благодарность Мокину А.В. и Данилькиной Л.В. за помощь, оказанную при подготовке пособия к изданию.
Пособие рекомендовано к изданию и использованию в учебном процессе для учащихся специальности 24.05 "Эксплуатация судовых энергетических установок" на заседании кафедры судовой электроавтоматики НГМА "_____"_________2001 г., протокол № ___.
Рецензенты:
ЭЛЕМЕНТЫ ЭЛЕКТРОННЫХ СХЕМ
Последнее изменение этой страницы: 2019-06-10; Просмотров: 886; Нарушение авторского права страницы
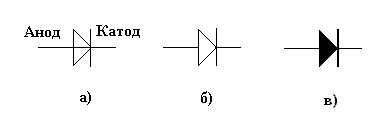
 Стабилитрон (диод Зенера). Это разновидность диода, нормальным режимом которого является состояние электрического пробоя.
Стабилитрон (диод Зенера). Это разновидность диода, нормальным режимом которого является состояние электрического пробоя.
 Для облегчения открывания тиристора на управляющий электрод подают напряжение управления U упр, величиной несколько вольт. Появляющийся ток управления I упр приоткрывает транзисторы, теперь они включаются при меньшем напряжении между катодом и анодом. В итоге, вольт-амперная характеристика тиристора представляет семейство характеристик, показанных на рис. 1.20, для разных I упр. Можно подать такой ток управления, при котором характеристика тиристора спрямится, не будет иметь выброса, и по форме будет близка к обычному диоду.
Для облегчения открывания тиристора на управляющий электрод подают напряжение управления U упр, величиной несколько вольт. Появляющийся ток управления I упр приоткрывает транзисторы, теперь они включаются при меньшем напряжении между катодом и анодом. В итоге, вольт-амперная характеристика тиристора представляет семейство характеристик, показанных на рис. 1.20, для разных I упр. Можно подать такой ток управления, при котором характеристика тиристора спрямится, не будет иметь выброса, и по форме будет близка к обычному диоду.
 Включается в прямом направлении. Для изготовления используются специальные полупроводниковые материалы – арсенид галлия и другие. В этих полупроводниках имеет место явление: дырки и электроны в зоне p-n перехода взаимно компенсируют друг друга (рекомбинируют) и этот процесс сопровождается высвобождением энергии, излучаемой в виде света. Существуют светодиоды, излучающие в красном спектре, зелёном, желтом. Его ВАХ совпадает с обычным диодом. Светодиоды обеспечивают достаточную яркость свечения уже при U пр =2 ¸ 3В, при этом прямой ток I пр =5 ¸ 20мА. Эти параметры согласуются с параметрами других электронных приборов – транзисторов, микросхем и т.д., что обеспечивает их широкое применение.
Включается в прямом направлении. Для изготовления используются специальные полупроводниковые материалы – арсенид галлия и другие. В этих полупроводниках имеет место явление: дырки и электроны в зоне p-n перехода взаимно компенсируют друг друга (рекомбинируют) и этот процесс сопровождается высвобождением энергии, излучаемой в виде света. Существуют светодиоды, излучающие в красном спектре, зелёном, желтом. Его ВАХ совпадает с обычным диодом. Светодиоды обеспечивают достаточную яркость свечения уже при U пр =2 ¸ 3В, при этом прямой ток I пр =5 ¸ 20мА. Эти параметры согласуются с параметрами других электронных приборов – транзисторов, микросхем и т.д., что обеспечивает их широкое применение.



 в последующем усиливается.
в последующем усиливается.

 Вторая разновидность - позистор.
Вторая разновидность - позистор. ,
,
 ,
, - относительное изменение сопротивления;
- относительное изменение сопротивления; - относительное удлинение;
- относительное удлинение; . Поэтому у такого датчика низкая чувствительность. Его используют в составе мостовой схемы, в плечи которой включены 4 тензорезистора. Это обеспечивает в 4 раза больший выходной сигнал от моста, однако его уровень измеряется милливольтметрами, что требует усиления.
. Поэтому у такого датчика низкая чувствительность. Его используют в составе мостовой схемы, в плечи которой включены 4 тензорезистора. Это обеспечивает в 4 раза больший выходной сигнал от моста, однако его уровень измеряется милливольтметрами, что требует усиления.



 На рис. 2.8. инвертирующий вход обозначен знаком минус, а неинвертирующий – знаком плюс. ОУ питается от двух одинаковых источников питания 15 В. Разнополярные выходы этих источников между собою объединены и точка их соединения принята в качестве общего провода схемы. Он обозначен знаком "^". За рубежом применяются и другие обозначения общего провода: " ", " ", " ". Электрический потенциал общего провода условно принят за ноль. Относительно общего провода в электронных устройствах подаются входные сигналы и снимается выходной. На рис. 2.8 обозначения "^" разных точек схемы означают, что все они соединены с общим проводом схемы. Относительно общего провода ОУ получает двухполярное питание – плюс 15 В (U пит1) и минус 15 В (U пит2). Это позволяет получить на выходе ОУ сигналы как положительной, так и отрицательной полярности.
На рис. 2.8. инвертирующий вход обозначен знаком минус, а неинвертирующий – знаком плюс. ОУ питается от двух одинаковых источников питания 15 В. Разнополярные выходы этих источников между собою объединены и точка их соединения принята в качестве общего провода схемы. Он обозначен знаком "^". За рубежом применяются и другие обозначения общего провода: " ", " ", " ". Электрический потенциал общего провода условно принят за ноль. Относительно общего провода в электронных устройствах подаются входные сигналы и снимается выходной. На рис. 2.8 обозначения "^" разных точек схемы означают, что все они соединены с общим проводом схемы. Относительно общего провода ОУ получает двухполярное питание – плюс 15 В (U пит1) и минус 15 В (U пит2). Это позволяет получить на выходе ОУ сигналы как положительной, так и отрицательной полярности.

 - коэффициент усиления разности входных сигналов.
- коэффициент усиления разности входных сигналов.



 , либо отрицательное
, либо отрицательное  . Если U оп =0 (сравнение с нулем), характеристика компаратора имеет вид, представленный на рис. 2.27, при этом
. Если U оп =0 (сравнение с нулем), характеристика компаратора имеет вид, представленный на рис. 2.27, при этом  , а
, а  .
. Uгистерезиса увеличивается. Если R2 увеличивается, то
Uгистерезиса увеличивается. Если R2 увеличивается, то  ,
, в качестве тактовых генераторов, задающих темп работы ЭВМ.
в качестве тактовых генераторов, задающих темп работы ЭВМ. .
.



 - инверсный вход.
- инверсный вход.
 Триггер имеет два состояния:
Триггер имеет два состояния: .
. .
. С приходом очередного импульса на вход триггера его выходной сигнал меняется на противоположный.
С приходом очередного импульса на вход триггера его выходной сигнал меняется на противоположный. Т – триггер как микросхема не выпускается, т.к. его можно создать, используя D – триггер.
Т – триггер как микросхема не выпускается, т.к. его можно создать, используя D – триггер. В простейшем случае счетчик представляет собою цепочку из ряда включенных последовательно триггеров, выходной сигнал предшествующего поступает на вход последующего. На рис. 4.9 показан один из простейших, но широко используемый вариант построения счетчика – четырехразрядный двоичный счетчик. Триггеры, использованные в нем, переключаются, когда входной сигнал изменяется из состояния "1" в состояние "0" (говорят – по срезу входного импульса). Это свойство отражено в изображении триггера треугольником на его входе, остриё которого направлено влево.
В простейшем случае счетчик представляет собою цепочку из ряда включенных последовательно триггеров, выходной сигнал предшествующего поступает на вход последующего. На рис. 4.9 показан один из простейших, но широко используемый вариант построения счетчика – четырехразрядный двоичный счетчик. Триггеры, использованные в нем, переключаются, когда входной сигнал изменяется из состояния "1" в состояние "0" (говорят – по срезу входного импульса). Это свойство отражено в изображении триггера треугольником на его входе, остриё которого направлено влево.





 .
. .
. . Это состояние фиксируется схемой контроля тока луча с приведением в действие местной сигнализации (на рис. 5.14 не показана).
. Это состояние фиксируется схемой контроля тока луча с приведением в действие местной сигнализации (на рис. 5.14 не показана). .
. .
.

 - период собственных колебаний канала,
- период собственных колебаний канала,
 - объем газовой полости;
- объем газовой полости; - сечение газового канала;
- сечение газового канала; , последнее выражение приводится к более простому виду:
, последнее выражение приводится к более простому виду:  .
. ,
,  ,
,
