|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Y(t) – управляющее воздействие.Стр 1 из 14Следующая ⇒
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ........................... 4 РАЗДЕЛ 1. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ....... 12 Тема 1.1. Системы автоматического управления и следящие системы....... 12 Тема 1.2. Системы автоматического регулирования................................... 26 Тема 1.3. Системы автоматического контроля. Автоматизация контрольных измерений в машиностроении....................................................................... 34 РАЗДЕЛ 2. ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ СИСТЕМ (ДАТЧИКИ)....................................................................................................... 39 Тема 2.1. Классификация и характеристики датчиков................................. 39 Тема 2.2. Схемы включения датчиков.......................................................... 47 РАЗДЕЛ 3. СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ......................................................................................... 52 Тема 3.1. Классификация систем управления оборудованием.................... 52 Тема 3.2. Системы числового программного управления промышленным оборудованием.............................................................................................. 57 Тема 3.3 Микропроцессорные устройства программного управления...... 61 Тема 3.4. Системы адаптивного программного управления....................... 66 Тема 3.5 Гибкие производственные системы и гибкие производственные модули........................................................................................................................ 70 РАЗДЕЛ 4. ДИАГНОСТИРОВАНИЕ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СИСТЕМ УПРАВЛЕНИЯ................................................................................................. 76 Тема 4.1. Классификация способов и средств диагностирования технического состояния систем управления........................................................................ 76 Тема 4.2. Диагностирование технического состояния систем программного управления..................................................................................................... 80 СПИСОК ЛИТЕРАТУРЫ................................................................................ 84 ВВЕДЕНИЕ. ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
1. Задачи и содержание предмета 2. Состояние и перспективы развития систем управления 3. Примеры систем автоматического управления
1. Идея создания устройств, которые бы работали без участия человека, возникла ещё в глубокой древности. Но автоматические устройства создавались лишь для увеселительных целей. В Древней Греции появилось слово α ὐ τ ό μ α τ ο ς (самодействующий), от которого произошло название области науки и техники об автоматических устройствах - автоматика.
История развития автоматики: Развитие автоматических устройств промышленного назначения началось с XVII века, когда изобрели первые турбины и паровые машины, где были использованы парораспределительный механизм, регулятор уровня воды в котле, регулятор частоты вращения вала и т.д. Кроме того, заметно продвинулось изобретение автоматических устройств с появлением часовых механизмов, после чего было создано множество игрушек, имитировавших движение. В 1765 г. русский ученый И. И. Ползунов сконструировал и изготовил первый в мире автоматический регулятор для поддержания уровня воды в паровом котле. Через 20 лет Джеймс Уатт создает автоматический регулятор частоты вращения вала паровой машины. В XIX в. с развитием электрической промышленности стали изобретаться и электрические автоматические устройства, такие как эл. регулятор частоты вращения вала паровой машины, который изобретен в 1854 г. К. И. Константиновым - русским механиком и электриком. В 1834 академик Б. С. Якоби создал электродвигатель. В 1850 г. Э. Х. Ленц создал осциллограф. В 1865 г. А. П. Давыдов создал следящий привод. В 1874 г. В. Н. Чиколев изобрел электронный регулятор со следящей системой. В 1876 г. вышла монография И. А. Вышеградского «Об общей теории регуляторов», которая положила начало автоматического управления и регулирования. Далее автоматическое регулирование развивалось с помощью трудов А. М. Ляпунова и авиатора Н. Е. Жуковского. В тот же период чех А. Стодола исследовал устойчивость регулирования гидро- и паровых турбин, а немецкий математик А. Гурвиц решил общую задачу о критерии устойчивости линейных систем автоматического регулирования. В 1940-х гг. наука «автоматика» окончательно сформировала свои понятия и законы. Особенно большой скачек произошел с изобретением ЭВМ, прототип которой был создан ещё Б. Паскалем в виде машины, выполняющей арифметические операции.
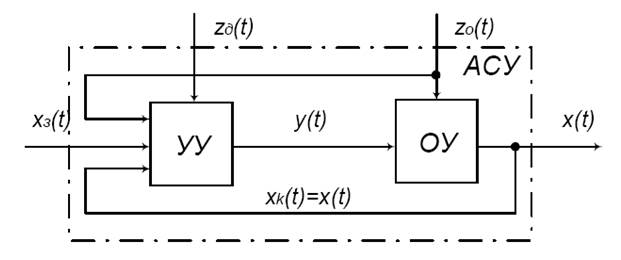
В настоящее время автоматические системы широко применяются во всех областях деятельности человека – в промышленности, на транспорте, в устройствах связи, при научных исследованиях и др. Во многих отраслях техники возможность автоматизации управления определяет дальнейшее их развитие. Автоматизация - высшая ступень механизации производственных процессов - существенно улучшает условия труда. Техническое устройство, выполняющее операции управления без непосредственного участия человека, называется автоматическим устройством. Автоматизация облегчает труд рабочего, позволяет находиться на безопасном расстоянии от производственного процесса, и, кроме того, способствует увеличению долговечности оборудования благодаря снижению перегрузов, обеспечивает эксплуатацию машин в рациональных режимах при оптимальных расходах электроэнергии, предотвращает возникновение аварийных ситуаций, облегчает поиск неисправностей и этим сокращает простои. С автоматизацией производственных процессов мы сталкиваемся повсеместно: при осуществлении погрузочно-разгрузочных работ, при контроле производства и качества какой-либо продукции, при проведении анализа деятельности производства. Задача автоматизации состоит в осуществлении автоматического управления различными техническими процессами. Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. Автоматическое управление широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья В различных технологических и производственных процессах величины, их характеризующие, должны удовлетворять определенным условиям. Создание условий, гарантирующих требуемое протекание любого процесса, называется управлением, т. е. под управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Машина, аппарат, агрегат, комплекс машин или система, в которых протекает процесс, подлежащий управлению, называются объектами управления, т. е. это совокупность технических средств, выполняющих данный процесс. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Управляющим — называют воздействие, подаваемое на объект с целью изменить ход процесса в соответствии с заданием. Если управление осуществляется без участия человека, то оно называется автоматическим, а если с участием человека - ручным. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность автоматического управляющего устройства и объекта управления, связанных и взаимодействующих между собой в соответствии с алгоритмом управления, называют системой автоматического управления (САУ). В теории автоматического управления каждый элемент блок-схемы называют элементарным звеном, реализующим элементарную операцию и характеризующимся математическим выражением. Различают два типа блок-схем: структурные и функциональные, имеющие одинаковое или аналогичное графическое изображение, но различную сущность. Структурной блок-схемой называют схему, в которой элементарные звенья, обозначенные буквами, соответствующими названиям отдельных электрических устройств (блоков), рассматривают с точки зрения динамики системы и описывают математическими (алгебраическими, дифференциальными, интегральными) уравнениями - передаточными функциями. Функциональной блок-схемой называют схему с обозначением составных звеньев (функциональных блоков) по роду выполняемых функций. На рис. 1 приведена обобщенная структурная схема АСУ.
Рис. 1. Обобщенная структурная схема АСУ
В ней: x(t) – управляемая величина – физическая величина, характеризующая состояние объекта. Часто объект управления имеет несколько управляемых величин x1(t), x2(t)… xn(t), тогда говорят об n-мерном векторе состояния объекта x(t) с перечисленными выше компонентами. Объект управления в этом случае называют многомерным. Примерами управляемых величин в электрической системе являются: ток, напряжение, мощность, частота вращения и т.д. zо(t), zд(t) – соответственно основное (действующее на объект управления) и дополнительное (действующее на устройство управления) возмущающие воздействия. Примерами основного возмущающего воздействия zо(t) являются изменение нагрузки синхронного генератора, температуры охлаждающей его среды и т.п., а дополнительного возмущающего воздействия zд(t) – изменение условий охлаждения УУ, нестабильность напряжения источников питания УУ и т. п. И следящие системы 1. Классификация систем автоматического управления 2. Законы автоматического управления. 3. Системы автоматизированного управления производством
1. Существует большое разнообразие систем автоматического управления. Чтобы как-то разобраться в этом многообразии проводится классификация САУ. Существует несколько признаков, по которым проводится классификация САУ. На рисунке 4 приведена примерная классификация САУ.
Рис. 4. Классификация САУ
Основные признаки классификации САУ: По назначению, то есть характеру изменения задающего воздействия, различают: ü системы автоматической стабилизации; ü системы программного управления; ü следящие системы. Стабилизирующая АСУ – система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным: x(t) ≈ xз = const (1.1)
Знак ≈ означает, что управляемая величина поддерживается на заданном уровне с некоторой ошибкой. Стабилизирующие АСУ самые распространенные в промышленной автоматике. Их применяют для стабилизации различных физических величин, характеризующих состояние технологических объектов. Программная АСУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени:
x(t) ≈ xз(t) = fп(t) (1.2)
Следящая АСУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее неизвестной функцией времени:
x(t) ≈ xз(t) = fс(t) (1.3)
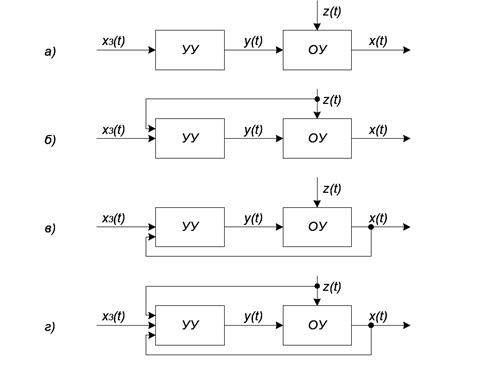
В стабилизирующих, программных и следящих АСУ цель управления заключается в обеспечении равенства или близости управляемой величины x(t) к ее заданному значению xз(t). Такое управление, осуществляемое с целью поддержания x(t) ≈ xз(t), называется регулированием. Управляющее устройство, осуществляющее регулирование, называется регулятором, а сама система – системой регулирования. По принципу управления различают: ü Системы с управлением по разомкнутому циклу; ü Системы с управлением по замкнутому циклу; ü Системы комбинированного управления. Разомкнутая АСУ – система, в которой не осуществляется контроль управляемой величины, т. е. входными воздействиями ее управляющего устройства являются только внешние (задающее и возмущающее) воздействия. Разомкнутые АСУ можно разделить в свою очередь на два типа: - осуществляющие управление в соответствии с изменением только задающего воздействия (Рис. 5, а); - осуществляющие управление в соответствии с изменением и задающего и возмущающего воздействий (Рис. 5, б). Алгоритм управления разомкнутой системы первого типа имеет вид: y(t) = Ay [ xз(t)] (1.4)
Чаще всего оператор Аy устанавливает пропорциональную связь между задающим воздействием xз(t) и управляющим воздействием y(t), а сама система в этом случае осуществляет программное управление. Системы первого типа работают эффективно лишь при условии, если влияние возмущений на управляемую величину невелико и все элементы разомкнутой цепи обладают достаточно стабильными характеристиками.
Рис. 5. Функциональные схемы САУ с разомкнутой (а, б), замкнутой (в) и комбинированной (г) цепями воздействий В системах управления по возмущению (Рис. 5, б) управляющее воздействие зависит от возмущающего и задающего воздействий:
y(t) = Ay [xз(t), z(t)] (1.5)
В большинстве случаев разомкнутые системы управления по возмущению выполняют функции стабилизации управляемой величины. Преимущество разомкнутых систем управления по возмущению – их быстродействие: они компенсируют влияние возмущения еще до того, как оно проявится на выходе объекта. Но применимы эти системы лишь в том случае, если на управляемую величину действуют одно или два возмущения и есть возможность измерения этих возмущений. Поэтому если эти величины действуют на объект как возмущения, то обычно стремятся стабилизировать их при помощи дополнительной системы или ввести в основную систему управления данным объектом сигнал, пропорциональный такому воздействию. Замкнутая АСУ (АСУ с обратной связью) – система, в которой входными воздействиями ее управляющего устройства являются как внешнее (задающее), так и внутреннее (контрольное) воздействия. Управляющее воздействие в замкнутой системе (Рисунок 5, в) формируется в большинстве случаев в зависимости от величины и знака отклонения истинного значения управляемой величины от ее заданного значения: y(t) = Ay [ε (t)], (1.6)
где ε (t) = xз(t) - x (t) – сигнал ошибки (сигнал рассогласования).
Замкнутую систему называют часто системой управления по отклонению . В замкнутой системе контролируется непосредственно управляемая величина и тем самым при выработке управляющего воздействия учитывается действие всех возмущений, влияющих на управляемую величину. В этом заключается преимущество замкнутых систем. Комбинированная АСУ – система, в которой входными воздействиями ее управляющего устройства являются как внешние (задающее и возмущающее), так и внутреннее (контрольное) воздействия. В комбинированных системах (Рисунок 5, г) имеется две цепи воздействий – по заданию и по возмущению, и управляющее воздействие формируется согласно оператору.
y(t) = Aз [ε (t)] + Aв [z(t)] (1.7) Эффективность работы комбинированной АСУ всегда больше, чем у порознь функционирующих замкнутой или разомкнутой систем. По характеру используемых для управления сигналов различают: 1. непрерывные или аналоговые САУ; 2. дискретные САУ, из которых выделяет: ü импульсные системы автоматического управления; ü релейные системы автоматического управления; ü цифровые системы автоматического управления. Непрерывная АСУ – АСУ, в которой действуют непрерывные (аналоговые), определенные в каждый момент времени сигналы. Дискретная АСУ - АСУ, в которой действует хотя бы один дискретный, определенный только в некоторые моменты времени сигнал. К дискретным АСУ относятся, например, АСУ, имеющие в своем составе цифровые вычислительные устройства: микропроцессоры, контроллеры, электронные вычислительные машины. По характеру используемой информации об условиях работы различают: 1. системы автоматического управления с жестким законом управления и структурой; 2. системы автоматического управления с изменяемыми структурой и законом управления, к которым относятся:
ü системы автоматической настройки; ü самообучающие системы; ü самоорганизующие системы. По характеру математических соотношений различают: 1. линейные системы автоматического управления, для которых справедлив принцип суперпозиции; 2. нелинейные системы автоматического управления, для которых принцип суперпозиции в общем случае не справедлив. Линейные АСУ – АСУ, все элементы которых описываются линейными дифференциальными и/или алгебраическими уравнениями. Нелинейные АСУ – АСУ, хотя бы один элемент которой описывается нелинейными дифференциальными и/или алгебраическими уравнениями. Как линейные, так и нелинейные САУ могут подразделяться на аналоговые, дискретные и дискретно-непрерывные, стационарные и нестационарные. При этом стационарной системой называется САУ, параметры элементов которой не зависят от времени работы системы. Для нестационарной САУ это условие не выполняется. Стационарные и нестационарные САУ могут быть с сосредоточенными и распределенными параметрами.
По количеству выходных координат объекта управления различают: 1. одномерные системы автоматического управления; 2. многомерные системы автоматического управления.
Последние делятся на системы связанного и несвязанного управления. В системах связанного управления отдельные управляющие устройства соединены между собой внешними связями. Входящая в состав многомерной системы отдельная САУ называется автономной, если управляемая ею выходная переменная не зависит от значения остальных управляемых величин. По способу выработки управляющего воздействия замкнутые АСУ разделяют на: 1. беспоисковые; 2. поисковые. Беспоисковая АСУ – АСУ, в которой управляющее воздействие вырабатывается в результате сравнения истинного значения управляемой величины с заданным значением. Такие системы применяют для управления сравнительно несложными объектами, характеристики которых достаточно хорошо изучены и для которых заранее известно в каком направлении и на сколько нужно изменить управляющее воздействие при определенном отклонении управляемой величины от заданного значения. Поисковая АСУ – АСУ, в которой управляющее воздействие формируется с помощью пробных управляющих воздействий и путем анализа результатов этих пробных воздействий. Такую процедуру поиска правильного управляющего воздействия приходится применять в тех случаях, когда характеристики объекта управления меняются или известны не полностью; например, известен вид зависимости управляемой величины от управляющего воздействия, но неизвестны числовые значения параметров этой зависимости. Поэтому поисковые системы называют еще системами с неполной информацией. Наиболее часто принцип автоматического поиска управляющих воздействий применяют для управления объектами, характеристики которых имеют экстремальный характер. Целью управления является отыскание и поддержание управляющих воздействий, соответствующих экстремальному значению управляемой величины. Такие поисковые системы называют экстремальными (оптимальными) системами. Особый класс АСУ образуют системы, которые способны автоматически приспосабливаться к изменению внешних условий и свойств объекта управления, обеспечивая при этом необходимое качество управления путем изменения структуры и параметров управляющего устройства. Они называются адаптивными ( самоприспосабливающимися) системами. В составе адаптивной АСУ имеется дополнительное автоматическое устройство, которое меняет алгоритм управления основного управляющего устройства таким образом, чтобы АСУ в целом осуществляла заданный алгоритм функционирования, который предписывает обычно максимизацию показателя качества. Поэтому адаптивные АСУ являются еще и оптимальными. По степени зависимости управляемой величины в установившемся режиме от величины возмущающего воздействия АСУ делят на: 1. статические; 2. астатические. Статическая АСУ – АСУ, в которой имеется зависимость управляемой величины в установившемся режиме от величины возмущающего воздействия. Астатическая АСУ – АСУ, в которой отсутствует зависимость управляемой величины в установившемся режиме от величины возмущающего воздействия. В зависимости от принадлежности источника энергии, при помощи которого создается управляющее воздействие, различают АСУ: 1. прямого действия; 2. непрямого действия. АСУ прямого действия – АСУ, в которой управляющее воздействие создается при помощи энергии объекта управления. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т. п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан). АСУ непрямого действия – АСУ, в которой управляющее воздействие создается за счет энергии дополнительного источника. 2. Алгоритм функционирования устройства (системы) – совокупность предписаний, ведущих к правильному выполнению технического процесса в каком-либо устройстве или в совокупности устройств (системе). К алгоритмам функционирования относятся: 1) Алгоритм стабилизации, который требует постоянства вектора выходного состояния ОУ Y ( t ) и равенство его заданному значению Yz. Yz = const. (1.8) При этом заданное значение должно оставаться постоянным в течении достаточно долгого периода времени. Примером систем, в которых используется алгоритм стабилизации, являются приводы главного движения станочного оборудования. 2) Программный алгоритм, для которого характерно изменение вектора выходного состояния ОУ по наперед известному закону или программе. В этом случае заданное значение вектора выходного состояния является известной функцией времени, то есть:
Yz ( t )= Fz ( t ). (1.9)
Примером использования такого алгоритма являются системы числового программного управления. 3) Следящий алгоритм работы ОУ характеризуется тем, что требуемый закон изменения вектора выходного состояния объекта заранее неизвестен. Следящий алгоритм может быть описан выражением:
Yz ( t )= F0( t ), (1.10)
где F0( t ) – неопределенная функция времени.
Таким алгоритмом работы характеризуются системы наведения или слежения за состоянием объекта, изменяющегося по случайному закону. Например, системы компенсации износа режущего инструмента. Графическое представление алгоритмов функционирования для вектора выходного состояния, содержащего только одну компоненту, представлено на рис. 6.
Рис. 6. Алгоритмы функционирования ОУ
Алгоритм управления – совокупность предписаний, определяющая характер воздействий извне на объект управления, обеспечивающих его алгоритм функционирования. Алгоритм функционирования управляющего устройства – зависимость управляющего воздействия от задающего воздействия, управляемой величины и дополнительного возмущающего воздействия. Для одномерной АСУ алгоритм управления можно записать следующим образом:
y(t) = Ау[ xз(t), x(t), zд(t)] (1.11)
Алгоритм функционирования объекта управления – зависимость управляемой величины от управляющего и основного возмущающего воздействий. Для одномерной АСУ алгоритм функционирования объекта можно записать следующим образом:
x(t) = Ао[ y(t), zо(t)]. (1.12)
Алгоритм функционирования объекта и алгоритм управления в совокупности образуют алгоритм функционирования АСУ. Алгоритмическая структура (схема) – структура (схема), представляющая собой совокупность взаимосвязанных алгоритмических звеньев и характеризующая алгоритмы преобразования информации в АСУ. При этом, алгоритмическое звено - часть алгоритмической структуры АСУ, соответствующая определенному математическому или логическому алгоритму преобразования сигнала. Если алгоритмическое звено выполняет одну простейшую математическую или логическую операцию, то его называют элементарным алгоритмическим звеном. На схемах алгоритмические звенья изображают прямоугольниками, внутри которых записывают соответствующие операторы преобразования сигналов. Иногда вместо операторов в формульном виде приводят графики зависимости выходной величины от входной или графики переходных функций. Различают следующие виды алгоритмических звеньев: ü статическое; ü динамическое; ü арифметическое; ü логическое. Статическое звено – звено, преобразующее входной сигнал в выходной мгновенно (без инерции). Связь между входным и выходным сигналами статического звена описывается обычно алгебраической функцией. К статическим звеньям относятся различные безынерционные преобразователи, например, резистивный делитель напряжения. Динамическое звено – звено, преобразующее входной сигнал в выходной в соответствии с операциями интегрирования и дифференцирования во времени. Связь между входным и выходным сигналами динамического звена описывается обыкновенными дифференциальными уравнениями. К классу динамических звеньев относятся элементы АСУ, обладающие способностью накапливать какой-либо вид энергии или вещества, например, интегратор на основе электрического конденсатора. Арифметическое звено – звено, осуществляющее одну из арифметических операций: суммирование, вычитание, умножение, деление. Наиболее часто встречающееся в автоматике арифметическое звено – звено, выполняющее алгебраическое суммирование сигналов, называют сумматором. Логическое звено – звено, выполняющее какую-либо логическую операцию: логическое умножение («И»), логическое сложение («ИЛИ»), логическое отрицание («НЕ») и т. д. Входной и выходной сигналы логического звена являются обычно дискретными и рассматриваются как логические переменные. Конструктивная структура (схема) – структура (схема), отражающая конкретное схемное, конструктивное и прочее исполнение АСУ. К конструктивным схемам относятся: кинематические схемы устройств, принципиальные и монтажные схемы электрические соединений и т. д. 3. Автоматические системы, применяемые при автоматизации производственных процессов, в зависимости от характера и объема операций, выполняемых ими, можно разделить на системы автоматического контроля, автоматического регулирования, автоматического управления, следящие, автоматической защиты, адаптивные и т. д. Автоматические системы могут быть комбинированными, т. е. представлять собой совокупность нескольких систем. Например, система автоматического регулирования представляет собой совокупность систем автоматического контроля и управления. Автоматические системы могут также различаться видами применяемых в них устройств, параметрами, конструктивными решениями и т. д. Следящая система – автоматическая система, в которой выходная величина воспроизводит с определенной точностью входную величину, характер изменения которой заранее не известен. Следящие системы используют для различных целей. В качестве выходной величины следящей системы можно рассматривать совершенно различные величины. Одной из наиболее широко распространенных разновидностей следящих систем являются системы управления положением объектов. Такие системы можно рассматривать как дальнейшее развитие и усовершенствование систем дистанционной передачи угловых или линейных перемещений, в которых регулируемой величиной обычно является угол поворота объекта. Следящая система представлена на рис. 7.
Рис. 7. Функциональная схема следящей системы
На элемент сравнения (ЭС) от задающего элемента (ЗЭ), связанного с входным валом следящей системы, поступает входная величина α вх. Сюда же от объекта управления (ОУ), связанного с выходным валом системы, поступает значение угла обработки α вых. В результате сравнения этих величин на выходе элемента сравнения появляется рассогласование Θ = α вх - α вых Сигнал рассогласования с выхода элемента сравнения поступает на преобразователь (Пр), в котором угол Θ преобразуется в пропорциональное ему напряжение U0 – сигнал ошибки. Однако в большинстве случаев мощность сигнала ошибки недостаточна для приведения в действие исполнительного двигателя (М). Поэтому между преобразователем и исполнительным двигателем включают усилитель (У), обеспечивающий необходимое усиление сигнала ошибки по мощности. Усиленное напряжение с выхода усилителя поступает на М, который приводит в действие объект управления, а перемещение α вых последнего передается на принимающий элемент измерительной схемы, т. е. на элемент сравнения. Адаптивная (самоприспосабливающаяся) система – система автоматического управления, у которой автоматически изменяется способ функционирования управляющей части для осуществления в каком-либо смысле наилучшего управления. В зависимости от поставленной задачи и методов ее решения возможны различные законы управления, поэтому адаптивные системы разделяют на следующие виды:
ü адаптивные системы функционального регулирования, где управляющее воздействие является функцией какого-либо параметра, например, подача – функция одной из составляющих силы резания, скорость резания – функция мощности; ü адаптивные системы предельного (экстремального) регулирования, которые обеспечивают поддержание предельного значения одного или нескольких параметров в объекте; ü адаптивные системы оптимального регулирования, в которых учитывается совокупность многих факторов с помощью комплексного критерия оптимальности. В соответствии с этим критерием осуществляется изменение регулируемых параметров и величин, например, поддержание в станке режима обработки, обеспечивающего максимальную производительность и наименьшую себестоимость обработки, определяется заданием оптимальных значений параметров (скоростей сил резания, температуры и т. д.), от которых зависят производительность и себестоимость процесса обработки.
Классификация СУТО • По структуре: одноступенчатая и двухступенчатая. 1. Одноступенчатая - центральный диспетчерский пункт (ЦДП) имеет непосредственные линии связи и каналы телемеханики со всеми объектами и комплексами производства. 2. Двухступенчатая - связь осуществляется через промежуточные пункты (операторские или диспетчерские). • По характеру использования: 1. для оперативного вмешательства в ход процесса; 2. для совершенствования организации управления; 3. для создания новых схем и конструкций, совершенствования машин и комплексов. • По степени централизации: 1. централизованные (характеризуются наличием в системе единого командоаппарата, с помощью которого осуществляется управляющее воздействие на рабочие органы станка, определяющие требуемую последовательность, скорость, подачу, величину перемещений.) Преимущества - компактность, малопротяженность линий связи. Недостатки - значительные затраты на переоборудование из-за изменения конструкции командоаппарата. Пример: коленвал токарно-револьверного станка; 2. децентрализованные (характеризуются отсутствием командоаппарата, управляющее воздействие формируется каждым отдельным рабочим органом, с помощью упоров и путевых выключателей). Все операции в таких системах выполняются последовательно. Преимущества - возможность организации управления значительным количеством объектов; исключение последующих сигналов при невыполнении предыдущих, быстрое перерегулирование. Недостатки - большая протяженность линий связи (увеличение погрешности), из-за регулировки и переустановки упоров значительные затраты времени. Пример: робототехнический комплекс (РТК) следящего привода. • По управлению движением: 1. путевые (управление по положению с помощью путевых выключателей, упоров, кулачков); 2. командные (управление по времени с помощью командоаппаратов и ПМК); • По типу программоносителя: магнитные ленты и диски; перфокарты и перфоленты; ЛВС - локально-вычислительные сети; копиры и шаблоны; кулачки и маховые механизмы. • По элементной базе: электрические; механические; гидравлические и пневматические. Задачи СУТО: 1) Обеспечение требуемых действий исполнительных механизмов. 2) Обеспечение заданных режимов. 3) Обеспечение требуемых параметров объекта производства. 4) Выполнение вспомогательных параметров. Требования. 1) Обеспечение высокой мобильности. 2) Обеспечение выполнения сложных задач функционирования. 3) Простота конструкции и низкая себестоимость. 4) Возможность дистанционного управления. 5) Возможность саморегулирования. Команды СУТО. - Технологические - предусмотренные техпроцессом. - Цикловые - изменение параметров, инструмента, СОЖ, реверс. - Служебные - выполняемые с помощью логических операций. Классификация систем, по характеру информации записанной на программоносителе; системы непрерывные, дискретные и дискретно-непрерывные. В непрерывных системах программа записывается непрерывно. Если применяется система с фазовой модуляцией, то программа представляется синусоидальным напряжением, фаза которого пропорциональна программируемым перемещениям; в системах с амплитудной модуляцией перемещениям пропорциональна амплитуда этого напряжения.
Таблица 1 Примеры применения СУТО
В дискретных (импульсных) системах информация о перемещениях задается соответствующим числом импульсов. Если механизм перемещения оснащен датчиком импульсов и для учета перемещения используется счетная схема, то систему называют счетно-импульсной. Если исполнительным устройством является шаговый двигатель, то систему называют шагово-импульсной. В импульсно-фазовых устройствах ЧПУ суммирование импульсов, задаваемых программой, производится в фазовом преобразователе, выходной, сигнал которого в виде угла сдвига фазы переменного напряжения пропорционален количеству импульсов программы. Классификация систем по изменению режимов обработки системы ЧПУ По изменению режимов обработки системы ЧПУ подразделяются на цикловые, программные и адаптивные. Цикловые системы осуществляют движения с повторяющимися циклами. В них применяется кулачковое, аппаратное, микропрограммное и программируемое управления. При кулачковом управлении используют для задания режимов штекерные панели, аппаратное управление осуществляют при помощи релейно-контактной или бесконтактной аппаратуры. Для микропрограммного управления применяют запоминающие устройства микрокоманд, а программируемое управление режимами обработки основано на использовании средств программируемой логики. В программных системах ЧПУ изменение режимов обработки осуществляется программными средствами с использованием программоносителя или памяти ЭВМ. Применение адаптивного управления позволяет производить автоматическое изменение режима обработки независимо от программы. Числовое программное управление обеспечивает управление по нескольким координатам, поэтому его широко применяют на многооперационных станках (обрабатывающих центрах) с автоматической сменой инструмента и обрабатываемых деталей.
3. Все СУТО включают в себя следующие узлы (Рис. 37): считывающее устройство, предназначенное для ввода управляющей программы с программоносителя (СУ); пульта ввода (ПВ); который предназначен для ввода управляющей программы с помощью клавиатуры, а также для назначения режимов работы, подачи разовых команд и индикации контроля состояния устройства; узла ввода (УВв), обеспечивающего выбор режима ввода, режима управления станком и устройством, вызов автоматических циклов по специальной команде G80 с встраиванием в циклы фактических параметров, управление лентопротяжным механизмом в старт-стопном режиме во время отработке управляющей программы (УП) и управление перемоткой ленты в начало программы, расшифровку адресов команд, временное хранение их содержимого и ввод в соответствующие регистры памяти содержимого команд по расшифрованному адресу. Кроме того, данное устройство управляет лентопротяжным механизмом во время поиска кадра N, заданного на переключателе
Рис. 37. Структурная схема типового позиционного УЧПУ
Пульт коррекции (ПК) предназначен для набора и хранения коррекции по предусмотренным адресам. Узел коррекции (УК) обеспечивает последовательное считывание цифровой информации, установленной на переключателях, ввод считываемой информации с нормализацией по запросам в УП в соответствующие адреса (адреса инструментов или координат). Пульт индикации (ПИ) обеспечивает индикацию информации на экране по задействованным адресам (построчно или по страницам) и представляет собой лучевую трубку, в левой части которой растровые строки индицируют действительное положение рабочих органов, а в правой части - заданные значения в УП. Пульт индикации может работать в рабочем и проверочном (без отработки) режимах, что дает возможность получить необходимую информацию. Пульт индикации вместе с пультом ввода является видеомонитором. Узел скорости (УС) обеспечивает управление скоростями по действующим координатам, управление торможением и выбором направления движения. Узел оперативной памяти (УОП) имеет память для хранения вводимой информации и информации результатов вычислений во время обработки. Кроме того, УОП имеет ПЗУ для хранения состава автоматических циклов с адресами. G81 - G89. Узел обслуживания (УО) - это специализированный микропроцессор, который выполняет обработку геометрической информации, т.е. вычисление угла рассогласования по всем управляемым координатам, выполняет функции таймера, управляет пультом индикации. Узел датчиков (УД) предназначен для преобразования сигналов датчиков положения в код УЧПУ, питания датчиков и усиления сигналов. Блок внешних разъемов (БРВ) представляет собой стандартный интерфейс в виде адаптера или микроконтроллера. Обеспечивает связь УЧПУ с электроавтоматическими устройствами станка и управление ими. БРВ предназначен для расшифровки, формирования и распределения сигналов управления к исполнительным механизмам, а так же для сбора и хранения информации состояния объекта, сигналов состояния рабочих органов, сигналов готовности.
Промышленным оборудованием
1. Классификация СЧПУ 2. Структура систем числового программного управления
1. Система числового программного управления – комплекс устройств и оборудования, включающий в себя: УЧПУ; объект управления; электроавтоматические устройства, осуществляющие непосредственное управление узлами объекта; оснастку и инструмент; программное и математическое обеспечение; средства контроля. УЧПУ можно классифицировать по различным признакам. Классификация систем по особенностям структуры системы ЧПУ: контурные и комбинированные системы ЧПУ Контурные системы ЧПУ позволяют производить обработку криволинейных поверхностей при фрезеровании, точении, шлифовании и других видах металлообработки. В этих системах программируется траектория перемещения режущего инструмента, поэтому их часто называют системами управления движением. Комбинированные системы ЧПУ представляют собой сочетание позиционных и контурных и называются также универсальными. Они находят применение в многооперационных станках, где требуется позиционно-контурное управление. При обозначении модели станка с ЧПУ, оснащенного позиционной системой, к ней добавляют индекс «Ф2», оснащенного контурной системой — индекс «ФЗ» и комбинированной - индекс «Ф4». Индекс «Ф1» в обозначении модели станка свидетельствует об оснащении станка цифровой индикацией и ручным управлением. Позиционные системы ЧПУ Системы ЧПУ металлорежущими станками классифицируются по различным признакам. По виду рабочих движений станка системы ЧПУ могут быть разделены на позиционные, контурные и комбинированные. Позиционные системы ЧПУ позволяют производить относительное перемещение инструмента и заготовки от одной точки (позиции) к другой. Такое управление используется в сверлильных, расточных и других станках, на которых обработка выполняется после установки инструмента в заданной позиции. Поскольку основной задачей для таких систем является перемещение инструмента (детали) в заданные координаты, их называют также системами координатного управления и управления положением. 2. При разработке современных универсальных УЧПУ стремятся придать этим устройствам свойства унификации, т. е. создают их на базе унифицированных узлов, которые обладают большой функциональной гибкостью. При разработке УЧПУ предусматривают более полную автоматизацию программирования, возможность встраивания УЧПУ в объект управления, который в свою очередь может встраиваться в технологический модуль или более крупный технологический комплекс, а также стыковку УЧПУ с другими УЧПУ, СЧПУ и ЭВМ более высокого ранга. Применяемые микроЭВМ своей функциональной структурой и математическим обеспечением проблемно сориентированы на управление всевозможными технологическими объектами. В микроЭВМ организация вычислительного процесса и операции логики предусматривает осуществление обработки информации управления, передачи данных и принятия информации с объекта управления в реальном масштабе времени. Для упрощения проблемной ориентации микроЭВМ и другие устройства архитектурно, функционально и конструктивно оформляют в виде отдельных модулей. Универсальные УЧПУ, созданные на базе микро-ЭВМ, могут включать в себя различные функциональные модули. Микропроцессорный модуль (МП) может включать в себя основной и вспомогательный микропроцессоры, причем основной обрабатывает информацию управления и планирования, а вспомогательный работает над подготовкой информации. Например, вспомогательный микропроцессор работает в системе автоматического программирования, рассчитывает траекторию движения методом линейно-круговой интерполяции, а основной обрабатывает информацию управления всеми устройствами. В МП метод обмена информацией магистральный, а управление имеет микропрограммную организацию, поэтому МП включает в себя, как правило, самостоятельный модуль микропрограммного управления. В МП могут входить буферные регистры для удобства оперирования форматами данных. Кроме того, МП могут быть многосекционными, что дает возможность наращивать секции и оперировать любыми необходимыми форматами. Модуль устройства управления (УУ) обеспечивает организацию управления устройствами СЧПУ. Модуль оперативной памяти (ОП) предназначен для хранения оперативной информации. В него может входить модуль стековой памяти для организации всевозможных прерываний УП («стек» от англ. слова штабель, кипа). Этот модуль предназначен для запоминания данных перед прерыванием УП. Стековые регистры запоминают содержимое счетчиков, адреса данных перед прерыванием для восстановления их в основной программе после возвращения из прерывания (данные регистры обмениваются информацией в следующем порядке: первый адрес записывается, последний считывается). Модули постоянной памяти неперепрограммируемые в виде постоянного запоминающего устройства (ПЗУ) и перепрограммируемые в виде перепрограммируемого запоминающего устройства (ППЗУ) предназначены для хранения постоянной информации. В модулях буферной памяти хранится промежуточная информация, что дает возможность обмениваться пакетированными данными, а также обмениваться информацией с устройствами, работающими с разными скоростями. Интерфейсные модули типа адаптера служат для связи с различными терминалами (пульт индикации, печатающее устройство, дисплей и т. д.). Модули микроконтроллеров (МК) управляют всевозможными внешними устройствами при общем управлении центральным процессором. Модули интервального таймера предназначены для задания временных интервалов, необходимых для согласования работающих устройств. Модули связи с объектом управления включают в себя устройства ЦАП и АЦП и микроконтроллеры, управляющие ими, которые служат для преобразования сигналов УЧПУ и электроавтоматических устройств станка в необходимый вид; логические микроконтроллеры, которые обрабатывают команды, подаваемые на ОУ в микроконтроллере заданные логические уравнения управления рабочими органами преобразуются в сигналы, формирующие логико-временные циклы управления электроавтоматическими устройствами. Модули операционных устройств (программные адаптеры) преобразуют информацию одного вида в информацию другого вида. Модули адаптивного управления предназначены для сбора, обработки технологической информации и организации корректирующей УП. Структурная схема типового универсального УЧПУ показана на рисунке 38. Устройство состоит из нескольких типовых модулей.
Рис. 38. Структурная схема типового универсального УЧПУ
Процессор (Пр) является программированным преобразователем информации и включает в себя: арифметико-логическое устройство (АЛУ), служащее для математической обработки информации и выполнения операций анализа; устройство управления (УУ) обеспечивает управление работой процессора по микропрограммному алгоритму (одноуровневая или многоуровневая организация управления). Оперативное запоминающее устройство (ОЗУ) предназначено для хранения управляющих и организующих программ, управляющих программ для управления электроавтоматическими устройствами станка с помощью программируемого командоконтроллера, для хранения параметров технологического объекта и УЧПУ, массивов, обслуживающих и корректирующих программ, стандартных подпрограмм и других массивов данных. ПЗУ хранит программы стандартных циклов (процедур), УП обработки информации, стандартные микропрограммы управления различными устройствами с помощью адаптеров (адаптеры управления приводами, пультом индикации и т. д.), стандартные программы управления другими аппаратными средствами. ППЗУ служит для записи программы логических микроконтроллеров, управляющих электроавтоматическими устройствами технологического объекта, записи УП контроллеров обращения к внешним устройствам, записи тестовых программ и т. д. Пульт оператора (ПО) предназначен для оперативного вмешательства в работу СЧПУ, т. е. подачи команд ручного управления, назначения режимов работы, для просмотра УП, ее редактирования, контроля работы системы, диалога с УЧПУ и т.д. К внешним устройствам (ВУ) могут относиться: системы тестового контроля, видеомониторы (устройства, включающие в себя дисплей и клавиатуру для загрузки УЧПУ командами или управляющими программами, для вызова и просмотра их), видеотерминалы, всевозможные печатающие устройства (принтеры), пульты программирования в коде ISO или в машинно-ориентированном языке, пульты программирования УП электроавтоматическими устройствами технологического оборудования, вычислительные системы автоматического программирования и ЭВМ более высокого ранга. Таймер (Т) организует метки реального масштаба времени, необходимые для управления всеми устройствами, в том числе и объектом управления. Интерфейс типа контроллера обмена (КО1) служит для обеспечения связи УЧПУ с внешними устройствами управления, управления обменом информацией со всеми внешними устройствами. Связь с объектом управления и основными устройствами объекта осуществляется через стандартный интерфейс типа Q = bus, представляющий собой контроллер управления обменом информации, и магистраль обмена на 16 разрядов. Контроллер обмена с объектом управления (К02) обеспечивает управление обменом информацией между технологическим объектом и УЧПУ с помощью шин местного интерфейса (ШИ). Многоканальные аналого-цифровые преобразователи (АЦП) служат для преобразования аналоговых сигналов, полученных от датчиков обратной связи (ЦОС), расположенных в технологическом объекте, в цифровой код УЧПУ (число каналов обусловлено числом управляемых координат). Цифроаналоговые преобразователи (ЦАП) преобразуют цифровые коды в аналоговые сигналы и выдают их на исполнительные устройства (на электроавтоматические устройства и приводы). Узлы приема (ПК) и вывода (ВК) кодов являются как бы буферными портовыми устройствами для временного хранения информации обмена, расшифровки адресов команд и т. д. Технологический объект (ТО) с исполнительными механизмами, электроавтоматическими устройствами (ЭУ) и измерительной системой реализует команды управления и контроль исполнения с помощью ДОС. Программного управления
1. Структурная схема микропроцессорных устройств 2. Программируемые микроконтроллеры 3. Современные тенденции в разработке МикроЭВМ
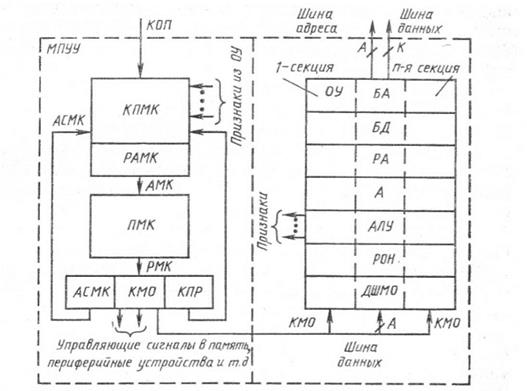
1. МикроЭВМ оперируют значительно меньшим числом команд, чем большие ЭВМ, но все равно оно достигает нескольких десятков и для их записи в двоичном коде требуется не менее шести разрядов. Так как адресуемый объем ПЗУ обычно составляет несколько десятков тысяч, чаще всего слов, адресная часть команды должна содержать разрядов, т. е. полная «длина» команды должна быть порядка разрядов, что при обычной «длине» ячеек памяти микроЭВМ, составляющей разрядов, требует трех ячеек памяти ПЗУ. Это одна из особенностей мини-ЭВМ и микроЭВМ, усложняющая программирование и снижающая результирующее быстродействие их, которое обычно не превышает 150—200 тыс. операций типа сложения в 1 с. МикроЭВМ обычно оперирует одноадресной системой команд, при которой адресная часть команды имеет только один адрес — адрес операнда, который необходимо передать в АЛУ. Другой операнд всегда находится в аккумуляторе; результат действия АЛУ над двумя операндами всегда остается в аккумуляторе. Команды бывают нескольких типов: команды пересылок, например, «передать данные из ОЗУ в ЦП»; команды арифметических операций, например, «сложить» или «вычесть»; команды логических операций, например, «сравнить два числа»; команды, перехода «перейти», «вызвать», «возвратить»; специальные команды, например, «останов». Полный список команд, которыми оперирует микроЭВМ, дается в сопроводительной документации на ЭВМ. В общей сложности в программе может быть много тысяч команд, которые необходимо составить и отработать, а затем записать в ПЗУ. Структурная схема типового секционного МП показана на рис. 39, МП состоит из двух функциональных модулей: микропрограммного устройства управления (МПУУ) и операционного устройства (ОУ), построенного из отдельных секций. МПУУ включает в себя: память микрокоманд (ПМК), которая предназначена для хранения принимаемых команд; контроллер последовательности микрокоманд (КПМК), основным назначением которого является реализация управляющих структур (фрагментов), встречающихся в микрокомандах. Таким образом, контроллер обеспечивает дешифрацию кода операции команды для обращения к первой микрокоманде микропрограммы, формирует адреса следующих микрокоманд, как линейной последовательности, так и условных или безусловных переходов к микропрограмме. Кроме того, некоторые контроллеры могут хранить признак переходов, управлять прерываниями на микропрограммном уровне. Как правило, в комплект микропроцессора входят модули контроллеров последовательности микрокоманд для организации управления в различных режимах.
Рис. 39. Структурная схема типового секционного микропроцессора МПУУ работает следующим образом. Код операции (КОП) с регистра команд поступает на вход контроллера последовательности микрокоманд (КПМК), и на выходе регистра адреса микрокоманды (РАМК) контроллера формируется адрес первой микрокоманды (АМК) выполняемой микропрограммы. Микрокоманда, подлежащая реализации в текущем микрокомандном цикле, считывается из памяти в регистры микрокоманд (РМК). Микрокоманда содержит три основных поля, содержание которых хранится в соответствующих узлах: 1) поле кода микрооперации (КМО), определяющее вид операции, выполняемой одним из устройств микро-ЭВМ; 2) поле, в котором закодированы признаки результата (КПР), поступающие из ОУ в контроллер и анализируемые контроллером при выполнении команд условного перехода по данным признакам условия; 3) поле, в котором содержится код адреса для формирования адреса следующей команды (АСМК). После выполнения считанной микрокоманды цикл повторяется. Управляющие сигналы микрокоманд подаются в соответствующие устройства микроэвм. ОУ предназначено для выполнения всех арифметических и логических операций. ОУ собирают из секций процессорных элементов, каждый из которых содержит арифметико-логическое устройство (АЛУ), регистры общего назначения (РОН), аккумулятор (А) — накапливающий регистр, дешифратор микрооперации (ДШМО), буфер данных (БД) и буфер адреса (БА), позволяющие временно хранить адрес (Л) и данные (Д). Одной из особенностей ОУ является вертикальное разбиение, что требует меньшего числа передач кодов между отдельными БИС. Шины данных, шины адреса и кода микроопераций объединяются в общую магистраль. Основными достоинствами секционных МП являются возможность разработки микроЭВМ с максимальным соответствием структуре характеризуемых задач, исключение избыточности структуры и разрядов, выбор произвольной нестандартной разрядности. Наличие независимых адресных шин и шин входных и выходных данных (шины адресов и данных могут быть различных форматов) позволяет организовать сопряжение с памятью и периферийными устройствами без использования мультиплексирования. 2. Программируемые логические микроконтроллеры (ПЛМК) в основном ориентированы на реализацию логических функций и используются вместо релейных схем управления, т. е. для управления полупроводниковыми схемами электроавтоматических устройств технологических объектов. ПЛМК реализуют функции командоаппаратов и микроконтроллеров и создаются на базе микроЭВМ. Данные микроЭВМ можно рассматривать как универсальную программно-настраиваемую модель цифрового управляющего автомата. Возможность применения ПЛМК в качестве универсального локального устройства управления разными технологическими процессами достигается путем внесения в ПЛМК программы, определяющей алгоритм работы конкретного объекта управления без изменения его электрической структуры. В состав ПЛМК, как минимум, входят логический микропроцессор с блоком управления, оперативная память, пульт настройки и загрузки управляющей программы и устройство связи с объектом управления (Рис. 40).
Рис. 40. Программируемый логический микроконтроллер
На рис. 40 представлена обобщенная структурная схема ПЛМК, в который входят различные устройства. Центральный логический процессор (ЦЛП) обеспечивает логическую обработку поступающей информации в соответствии с записанной программой в памяти программы и моделирует конкретную релейную схему. Устройство управления логического процессора опрашивает все входы и выходы блока регистров, производит логическое сравнение состояния входов и выходов и по результатам сравнения включает или выключает те или иные исполнительные органы через схему устройства связи с объектом управления. Микроконтроллер с помощью программного таймера и счетчика последовательно, строка за строкой, опрашивает (сканирует) память программ и с помощью ЦЛП производит вычисления логических функций согласно уравнениям, поступающим из памяти программ, и заносит вычисленные значения в память данных. После того, как опрос памяти окончился, устройство управления микроконтроллера выполняет обмен данными между входными и выходными регистрами блока регистров и памятью данных. Затем опрос памяти программ повторяется от начала до конца. Таким образом, опрос памяти программ и обмен данными периодически повторяется в процессе управления. Однократный проход логического процессора по всей программе называют циклом полного опроса (сканирование) памяти, а время, в течение которого этот цикл исполняется, временем цикла. Оно характеризует быстродействие микроконтроллера. Программируемые логические микроконтроллеры реализуют относительно простые функции управления и обладают рядом важных особенностей. Первая из них заключается в том, что циклы непрерывно повторяются в режиме управления объектом. Циклы состоят из отдельных фраз следующего содержания: «фотографирования» состояния узлов объекта (опрос выходов), переработки данных совместно с данными новой фразы и выдачи управляющих сигналов на исполнительные органы. «Фотографирование» состояния объекта управления в данный момент времени реализуется вводом в соответствующие ячейки памяти сигналов опроса состояния объекта (получение ответов от соответствующих аппаратов). Вторая особенность ПЛМК заключается в том, что для программирования используют простейшие специализированные, но эффективные языки программирования или языки символического задания алгоритмов управления: простые, описывающие релейно-контактные схемы; логических функций; описывающие УП с помощью операторов управления; символического кодирования и т. д. Третьей особенностью ПЛМК является то, что они могут функционировать без постоянного обслуживающего персонала в процессе эксплуатации.
3. Широкие возможности для построения устройств ЧПУ открывает применение микропроцессоров и мини-ЭВМ. Алгоритм функционирования станка или группы станков зависит от сложности конфигурации обрабатываемой детали, получения требуемых точности обработки и шероховатости поверхности. Для решения задач обработки деталей простой конфигурации при невысоких требованиях к точности и качеству обработки алгоритм функционирования должен быть достаточно простым. Процессор ЭВМ в этом случае может быть выполнен на базе стандартных блоков, из которых создается управляющее устройство. Оно воспроизводит модель управления станком, допускает параллельное выполнение операций, реализующих несложные функции. Такие управляющие устройства получили название цифровых моделей. Промышленность выпускает такие системы ЧПУ типа Н22, НЗЗ, построенные на микроэлектронных элементах. Они предназначены для управления станками и осуществляют позиционирование, прямоугольное и контурное (в плоскости) управление. Перестройка алгоритмов управления в таких системах невозможна. Микро ЭВМ отличаются от мини-ЭВМ меньшими разрядностью слова и объемом памяти, реализованы на минимальном числе интегральных схем с большой степенью интеграции и служат для создания автоматических систем управления несложными объектами; устройств связи с мини-ЭВМ, персональными компьютерами (ПК) и др. Переход от многокристалльного микропроцессора к одно-кристалльному и, наконец, к микроЭВМ, размещенной на одном кристалле, создает наибольший экономический эффект при реализации упрощенных ЭВМ. Многокристальные микропроцессоры обладают большей функциональной полнотой, вычислительной мощностью и производительностью и наиболее эффективны при построении микро- и мини-ЭВМ для управления более сложными установками и технологическими процессами. Автоматическая линия
Рис. 44. Типовая структура системы тестового диагностирования Различия между системой автоматического контроля и техническим диагностированием представлены в таблице 2.
Таблица 2 Основные отличия САК и технического диагностирования
Функциональное диагностирование осуществляется в случае поступления на основные входы объекта воздействия, задаваемого рабочим алгоритмом Диагностирование включает в себя три этапа: измерение, анализ и принятие решения. Оптимальное диагностирование предполагает поиск и обнаружение неисправностей с помощью эксперимента. К числу важнейших групп факторов, обеспечивающих рост эффективности затрат на техническое обслуживание и ремонт, относят широкое внедрение прогрессивных форм организации, производства этих работ и управления ими, а также развитие систем технического диагностирования. Состояние функционирования (допустимое, предаварийное, аварийное) определяется с помощью технического диагностирования, с его же помощью осуществляется поиск неисправностей. Тестовый контроль предназначен для определения неисправностей. Характеризуется возможностью подачи специального воздействия на объект управления. Используется для оценки причин выпуска станком изделий с отклонениями от размеров. Производится проверка управляющих сигналов и подналадки путём подачи команды и проверки ее исполнения. Цель проведения тестового контроля - выяснение места, причины, времени отказа. Аппаратный контроль - применяется на станках ЧПУ типа NC, т.е. микроконтроллерных. Для обнаружения ошибок в программе и функциональных неисправностях в системе. Функции могут быть заданы в аналоговом виде или с помощью программы (ПМК, электронные схемы), они однозначны и не могут в изменяться. Производится с помощью использования программы «тест» в начале работы или в фоновом режиме. Комбинированный метод - заключается в совокупном использовании логических и математических обработок информации.
СПИСОК ЛИТЕРАТУРЫ
1. Головенков С. Н., Сироткин С. В. Основы автоматики и автоматического регулирования станков с программным управлением: учебник для машиностроительных техникумов. 2-е изд., перераб. и доп. М.: Машиностроение, 1988. 288 с. 2. Данилов И. А., Иванов П. М. Общая электротехника с основами электроники: учебное пособие для неэлектротехн. спец. Техникумов. 2-е изд., перераб. и доп. М.: Высшая школа, 1989. 752 с. 3. Келим Ю. М. Типовые элементы систем автоматического управления: учебное пособие для студентов учреждений СПОЮ. М: ФОРУМ: ИНФРА-М, 2004. 384 с. 4. Лазарева Т. Я., Мартемьянов Ю. Ф. Основы теории автоматического управления: учебное пособие. Тамбов: издательство Тамбовского государственного технического университета, 2003. 308 с. 5. Полетаев В. А. Проектирование машиностроительного производства: методическое пособие по выполнению курсовой работы для студентов специальности 120101 «Технология автоматизированного производства». Ивановский государственный энергетический университет [Электронный ресурс]. URL: http: //elib.ispu.ru/library/lessons/Poletaev2/. 6. Сенигов П. Н. Теория автоматического управления: конспект лекций. Челябинск: ЮУрГУ, 2000. 93 с. 7. Староверов А. Г. Основы автоматизации производства: учебник для сред. учеб. Заведений. М.: Машиностроение, 1989. 312 с. 8. Схиртладзе А. Г. Работа оператора на станках с программным управлением: учеб. пособие для СПТУ. М.: Высш. шк., 1988. 175 с. 9. Фалеев М. В. Теория автоматического управления. Элементы теории автоматического управления технологическим оборудованием автоматизированных производств. Электронный конспект лекций по курсу. Ивановский государственный энергетический университет [Электронный ресурс]. URL: http: //elib.ispu.ru/library/lessons/faleev/. 10. Шишмарев В. Ю. Основы автоматического управления: учеб. пособие для студентов высш. учебных заведений. М.: Издательский центр «Академия», 2008 г. 352 с. 11. Шурков В. Н. Основы автоматизации производства и промышленные роботы: учебное пособие для машиностроительных техникумов. М.: Машиностроение, 1989. 240 с.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ........................... 4 РАЗДЕЛ 1. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ....... 12 Тема 1.1. Системы автоматического управления и следящие системы....... 12 Тема 1.2. Системы автоматического регулирования................................... 26 Тема 1.3. Системы автоматического контроля. Автоматизация контрольных измерений в машиностроении....................................................................... 34 РАЗДЕЛ 2. ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ СИСТЕМ (ДАТЧИКИ)....................................................................................................... 39 Тема 2.1. Классификация и характеристики датчиков................................. 39 Тема 2.2. Схемы включения датчиков.......................................................... 47 РАЗДЕЛ 3. СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ......................................................................................... 52 Тема 3.1. Классификация систем управления оборудованием.................... 52 Тема 3.2. Системы числового программного управления промышленным оборудованием.............................................................................................. 57 Тема 3.3 Микропроцессорные устройства программного управления...... 61 Тема 3.4. Системы адаптивного программного управления....................... 66 Тема 3.5 Гибкие производственные системы и гибкие производственные модули........................................................................................................................ 70 РАЗДЕЛ 4. ДИАГНОСТИРОВАНИЕ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СИСТЕМ УПРАВЛЕНИЯ................................................................................................. 76 Тема 4.1. Классификация способов и средств диагностирования технического состояния систем управления........................................................................ 76 Тема 4.2. Диагностирование технического состояния систем программного управления..................................................................................................... 80 СПИСОК ЛИТЕРАТУРЫ................................................................................ 84 ВВЕДЕНИЕ. ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
1. Задачи и содержание предмета 2. Состояние и перспективы развития систем управления 3. Примеры систем автоматического управления
1. Идея создания устройств, которые бы работали без участия человека, возникла ещё в глубокой древности. Но автоматические устройства создавались лишь для увеселительных целей. В Древней Греции появилось слово α ὐ τ ό μ α τ ο ς (самодействующий), от которого произошло название области науки и техники об автоматических устройствах - автоматика.
История развития автоматики: Развитие автоматических устройств промышленного назначения началось с XVII века, когда изобрели первые турбины и паровые машины, где были использованы парораспределительный механизм, регулятор уровня воды в котле, регулятор частоты вращения вала и т.д. Кроме того, заметно продвинулось изобретение автоматических устройств с появлением часовых механизмов, после чего было создано множество игрушек, имитировавших движение. В 1765 г. русский ученый И. И. Ползунов сконструировал и изготовил первый в мире автоматический регулятор для поддержания уровня воды в паровом котле. Через 20 лет Джеймс Уатт создает автоматический регулятор частоты вращения вала паровой машины. В XIX в. с развитием электрической промышленности стали изобретаться и электрические автоматические устройства, такие как эл. регулятор частоты вращения вала паровой машины, который изобретен в 1854 г. К. И. Константиновым - русским механиком и электриком. В 1834 академик Б. С. Якоби создал электродвигатель. В 1850 г. Э. Х. Ленц создал осциллограф. В 1865 г. А. П. Давыдов создал следящий привод. В 1874 г. В. Н. Чиколев изобрел электронный регулятор со следящей системой. В 1876 г. вышла монография И. А. Вышеградского «Об общей теории регуляторов», которая положила начало автоматического управления и регулирования. Далее автоматическое регулирование развивалось с помощью трудов А. М. Ляпунова и авиатора Н. Е. Жуковского. В тот же период чех А. Стодола исследовал устойчивость регулирования гидро- и паровых турбин, а немецкий математик А. Гурвиц решил общую задачу о критерии устойчивости линейных систем автоматического регулирования. В 1940-х гг. наука «автоматика» окончательно сформировала свои понятия и законы. Особенно большой скачек произошел с изобретением ЭВМ, прототип которой был создан ещё Б. Паскалем в виде машины, выполняющей арифметические операции.
В настоящее время автоматические системы широко применяются во всех областях деятельности человека – в промышленности, на транспорте, в устройствах связи, при научных исследованиях и др. Во многих отраслях техники возможность автоматизации управления определяет дальнейшее их развитие. Автоматизация - высшая ступень механизации производственных процессов - существенно улучшает условия труда. Техническое устройство, выполняющее операции управления без непосредственного участия человека, называется автоматическим устройством. Автоматизация облегчает труд рабочего, позволяет находиться на безопасном расстоянии от производственного процесса, и, кроме того, способствует увеличению долговечности оборудования благодаря снижению перегрузов, обеспечивает эксплуатацию машин в рациональных режимах при оптимальных расходах электроэнергии, предотвращает возникновение аварийных ситуаций, облегчает поиск неисправностей и этим сокращает простои. С автоматизацией производственных процессов мы сталкиваемся повсеместно: при осуществлении погрузочно-разгрузочных работ, при контроле производства и качества какой-либо продукции, при проведении анализа деятельности производства. Задача автоматизации состоит в осуществлении автоматического управления различными техническими процессами. Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. Автоматическое управление широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья В различных технологических и производственных процессах величины, их характеризующие, должны удовлетворять определенным условиям. Создание условий, гарантирующих требуемое протекание любого процесса, называется управлением, т. е. под управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Машина, аппарат, агрегат, комплекс машин или система, в которых протекает процесс, подлежащий управлению, называются объектами управления, т. е. это совокупность технических средств, выполняющих данный процесс. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Управляющим — называют воздействие, подаваемое на объект с целью изменить ход процесса в соответствии с заданием. Если управление осуществляется без участия человека, то оно называется автоматическим, а если с участием человека - ручным. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность автоматического управляющего устройства и объекта управления, связанных и взаимодействующих между собой в соответствии с алгоритмом управления, называют системой автоматического управления (САУ). В теории автоматического управления каждый элемент блок-схемы называют элементарным звеном, реализующим элементарную операцию и характеризующимся математическим выражением. Различают два типа блок-схем: структурные и функциональные, имеющие одинаковое или аналогичное графическое изображение, но различную сущность. Структурной блок-схемой называют схему, в которой элементарные звенья, обозначенные буквами, соответствующими названиям отдельных электрических устройств (блоков), рассматривают с точки зрения динамики системы и описывают математическими (алгебраическими, дифференциальными, интегральными) уравнениями - передаточными функциями. Функциональной блок-схемой называют схему с обозначением составных звеньев (функциональных блоков) по роду выполняемых функций. На рис. 1 приведена обобщенная структурная схема АСУ.
Рис. 1. Обобщенная структурная схема АСУ
В ней: x(t) – управляемая величина – физическая величина, характеризующая состояние объекта. Часто объект управления имеет несколько управляемых величин x1(t), x2(t)… xn(t), тогда говорят об n-мерном векторе состояния объекта x(t) с перечисленными выше компонентами. Объект управления в этом случае называют многомерным. Примерами управляемых величин в электрической системе являются: ток, напряжение, мощность, частота вращения и т.д. zо(t), zд(t) – соответственно основное (действующее на объект управления) и дополнительное (действующее на устройство управления) возмущающие воздействия. Примерами основного возмущающего воздействия zо(t) являются изменение нагрузки синхронного генератора, температуры охлаждающей его среды и т.п., а дополнительного возмущающего воздействия zд(t) – изменение условий охлаждения УУ, нестабильность напряжения источников питания УУ и т. п. y(t) – управляющее воздействие. Управляющее воздействие вырабатывается в управляющем устройстве в соответствии с алгоритмом управления в зависимости от истинного и предписанного значений управляемой величины. xк(t) = x(t) – контрольное воздействие – информация об истинном значении управляемой величины. xз(t) – задающее воздействие – предписанное (желаемое) значение управляемой величины. Воздействия z(t) и xз(t) являются внешними для рассматриваемой системы, а воздействия xк(t) и y(t) – внутренними. Передача внешних и внутренних воздействий происходит через элементы АСУ, которые в совокупности образуют несколько цепей воздействий. На рис. 1 можно указать, например, цепи воздействий от величины xз(t) к величине y(t) и далее к x(t), от zо(t) к x(t). Значение управляемой величины, которое следует поддерживать в данный момент времени для правильного протекания техпроцесса, называют предписанным (заданным) значением, а фактическое, т.е. измеряемое значение действительным (текущим). Разницу между заданным и действительными значениями называют рассогласованием. Сигналы – это совокупность потоков энергии или вещества, поступающих в объект управления или выходящих из него, возмущающие и управляющие воздействия, а также регулируемые параметрами. По направлению различают входные и выходные сигналы объекта управления. Так возмущающие и управляющие воздействия будут входными сигналами для ОУ; регулируемый параметр всегда принимают за выходной сигнал объекта управления, даже если он физически не выходит за пределы объекта (например, температура в топке котла, уровень вещества в бункере, напряжение на обмотках электродвигателя). Технологические параметры – это физико-химические величины, характеризующие состояние технологического процесса в объекте управления (например, температура, давление, скорость вращения и др.) Регулируемый параметр – это технологический параметр, значением которого управляют с помощью специальных технических средств. Число регулируемых параметров, как правило, значительно меньше общего числа технологических параметров. 2. Автоматизация является одним из главных направлений научно-технического прогресса и важным средством повышения эффективности производства. Современное промышленное производство характеризуется ростом масштабов и усложнением технологических процессов, увеличением единичной мощности отдельных агрегатов и установок, применением интенсивных, высокоскоростных режимов, близких к критическим, повышением требований к качеству продукции, безопасности персонала, сохранности оборудования и окружающей среды. Экономичное, надежное и безопасное функционирование сложных технических объектов может быть обеспечено с помощью лишь самых совершенных технических средств, разработка, изготовление, монтаж, наладка и эксплуатация которых немыслимы без знания ТАУ. Современными тенденциями в автоматизации производства являются: - широкое применение ЭВМ для управления; - создание машин и оборудования со встроенными микропроцессорными средствами измерения, контроля и регулирования; - переход на децентрализованные (распределенные) структуры управления с микроЭВМ; - внедрение человеко-машинных систем; - использование высоконадежных технических средств; - автоматизированное проектирование систем управления.
3. Рассмотрим в качестве примера системы автоматического управления технологический процесс – регулирование температуры в электропечи для закаливания металла. Для реализации этого процесса электропечь снабжается управляющим (или регулирующим) органом, с помощью которого можно управлять процессом закаливания – изменять температуру в соответствии с заданным законом. Представим данный процесс с помощью функциональной схемы (Рис. 2).
Рис. 2. Функциональная схема технологического процесса закаливания металла в электропечи
Данная система поддерживает необходимый режим, т. е. изменение температуры y ( t ) в электропечи по заданному закону. Для обеспечения требуемого процесса электропечь снабжается двумя элементами: термопарой, с выхода которой получают электрической напряжение x ( t ), пропорциональное температуре в электропечи, и реостатом, с помощью которого меняется сопротивление в цепи ее нагрева. Предусмотрен прибор, на котором фиксируется реальная температура в электропечи. Отклонение реальной температуры от заданной не должно превышать допустимого значения ε ( t ). В системе имеется обратная связь. При автоматическом управлении процессом воздействие u ( t ) на управляемый орган (реостат) осуществляет специальное управляющее устройство. Поскольку с выхода термопары получают сигнал очень небольшой мощности, в схему вводят промежуточное звено – усилитель мощности. Сигнал y ( t ) (заданной температуры в печи) называют управляющим, сигнал x ( t ) (реальной температуры) – управляемой переменной, а систему, реализующую процесс закаливания – системой автоматического управления. Еще одним примером является САУ, предназначенная для регулирования уровня жидкости в парогенераторах и конденсаторах. Принципиальная схема такой системы представлена на рис. 3.
Рис. 3. Принципиальная схема автоматического регулирования уровня жидкости Уровень жидкости h ( t ) завит от разности двух величин: ее притока Gп и расхода Gр. Если Gп> Gр, уровень растет, и наоборот, при Gп< Gр уровень уменьшается. Приток Gп можно изменять посредством регулирующего клапана (РК), который управляется электроприводом (П). Сигнал, соответствующий действительному уровню h ( t ), измеряется уровнемером (УМ) и сравнивается с заданным уровнем hз. В зависимости от значения и знака сигнала рассогласования ε ( t ) регулятор посредством электропривода увеличивает (при ε > 0) или уменьшает (при ε < 0) приток жидкости Gп, поддерживая равенство между Gп и Gр при заданном уровне hз. Изменение расхода Gр нарушает баланс в схеме, т.е. Gр является возмущающим сигналом. Для повышения точности регулирования наряду с сигналом ε ( t ) используется сигнал G п, который обеспечивает местную ОС, или так называемое комбинированное регулирование. Выходной сигнал некоторых расходомеров (РМ) пропорционален квадрату расхода жидкости, поэтому цепи измерения их расходов содержат блоки извлечения корня (БИК). Можно записать: ü сигнал на выходе системы (заданное воздействие) y ( t )= hз; ü сигнал на выходе системы (уровень жидкости) x ( t ) = h ( t ); ü сигнал возмущения (расхода жидкости) u ( t )= Gр( t ). |
||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-06-19; Просмотров: 350; Нарушение авторского права страницы
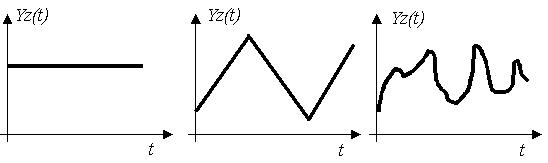 Стабилизация Программный Следящий
Стабилизация Программный Следящий