|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ДОСЛІДЖЕННЯ СЕЛЬСИНІВ В ІНДИКАТОРНОМУ І ТРАНСФОРМАТОРНОМУ РЕЖИМАХ РОБОТИ ⇐ ПредыдущаяСтр 9 из 9
8.1. Мета роботи 8.1.1. Ознайомитися з конструкцією і принципом роботи сельсинів. 8.1.2. Досліджувати роботу сельсинів в індикаторному і трансформаторному режимах.
8.2. Основні теоретичні положення У сучасній техніці часто виникає необхідність в синхронізації обертання або повороту осей механізмів. Для дистанційного керування, регулювання або контролю застосовуються індукційні електричні машини - трифазні або однофазні сельсини. Однофазні сельсини - це звичайно невеликі індукційні машини, які мають однофазну обмотку збудження і трифазну обмотку синхронізації У схемах автоматики використовуються дві системи синхронного зв'язку передачі кута: індикаторна і трансформаторна. Індикаторна система синхронного зв'язку застосовується там, де момент опору на веденій осі малий по величині. Трансформаторна схема синхронного зв'язку застосовується там, де на веденій осі є значний момент опору. По конструкції сельсини діляться на контактні, такі, що мають ковзаючи контакти, кільця, і безконтактні, такі, що не мають ковзаючих контактів. Сельсини випускаються на частоти: 50, 400, 500 Гц. 8.2.2. Робота сельсинів в індикаторному режимі. Проста індикаторна схема синхронного зв'язку для дистанційної передачі кута складається з двох абсолютно однакових сельсинів (приймача і датчика) і лінії зв'язку . Обмотки збудження (ОЗ) обох сельсинів підключаються до однофазної мережі змінного струму. Кінці фаз обмотки синхронізації приймача з'єднуються лінією зв'язку з кінцями фаз обмотки синхронізації датчика. Змінний струм обмотки збудження сельсинів створює магнітний потік, який індукує в обмотках синхронізації сельсинів е.р.с. Величина е.р.с. тієї або іншої фази обмотки синхронізації залежить від її просторового розташування відносно обмотки збудження. Якщо фази обмоток синхронізації датчика і приймача розташовані однаково щодо відповідних обмоток збудження (aд = aп), то в сполучених між собою лінією зв'язку фазах обмоток синхронізації приймача і датчика індукуються однакові і зустрічно-направлені е.р.с. Ці е.р.с. врівноважують один одного, і в ланцюзі обмоток синхронізації струм відсутній. Таке положення ротора сельсинів називається узгодженим. Якщо ротор датчика поворотом на деякий кут вивести з узгодженого режиму, то рівновага е.р.с., індуктованих у фазах обмоток синхронізації, порушиться. При цьому в обмотках синхронізації і лінії зв'язку з'являться струми. В результаті взаємодії цих струмів з потоком обмотки збудження сельсина - приймача виникає момент (що синхронізує), що обертає, який повертатиме ротор приймача до тих пір, поки він не прийде в узгоджене з ротором датчика положення. Величина синхронізуючого моменту, що розвивається сельсином - приймачем, залежить від кута розузгодження і параметрів сельсинів, що входять в систему. Точність сельсинів в статичному режимі визначається похибкою Dq, яка представляє собою напівсуму максимального позитивного qмах1 і максимального негативного відхилень qмах2 (помилок) при різних положеннях ротора: qмах1 + qмах2 Dq = ---------------. 2 Похибка сельсинів визначається в статичному режимі таким чином: повертають ротор датчика на 360° спочатку за годинниковою стрілкою, а потім проти годинникової стрілки, вимірюючи через кожних 10° кут розузгодження (помилку). При цьому визначають і qмах1 і qмах1 Потім по формулі визначають Dq. 8.2.3. Робота сельсинів в трансформаторному режимі. Проста трансформаторна схема синхронного зв'язку складається з двох сельсинів - приймача і датчика, сполучених лінією зв'язку. У обмотку збудження сельсина - приймача підключається навантаження (або вимірювальний вольтметр). Узгодженим положенням сельсинів в трансформаторному режимі називається таке положення роторів, при якому вихідна напруга приймача Uвих рівна нулю. Однофазна обмотка збудження сельсина датчика (ОЗД) підключається до мережі змінного струму. Струм цієї обмотки створює пульсуюче магнітне поле, яке, зчіплюючись з обмоткою синхронізації, наводить в її фазах е.р.с.: Е ад = Е m cos aд; Е bд = Е m cos(aд - 120°); Е сд = Е m cos(aд - 240°), величина яких залежить від положення фаз обмотки синхронізації щодо обмотки збудження. Під дією е.р.с. Е ад, Е bд, Е сд в сполучених між собою однойменних фазах обмоток датчика і приймача і лінії зв'язку виникають струми I а , I b , I с , величина яких визначається величиною, відповідною е.р.с., повними опорами фаз датчика Zфд, приймача Zфп і лінії зв'язку. Ці струми, протікаючи по фазах обмотки синхронізації приймача, створюють пульсуюче магнітне поле Ф ап, Ф bп, Ф сп. Потоки фаз приймача Ф ап, Ф bп, Ф сп складаючись, утворюють результуючий магнітний потік Фп обмотки синхронізації приймача, направлений під залежним від розузгодження кутом до однофазної обмотки збудження приймача ОЗП. Потік Фп, пульсуючи з частотою мережі, наводить в однофазній (вихідний) обмотці приймача е.р.с. - вихідна напруга приймача Uвих. За початок відліку кутів в сельсині - приймачі застосовується положення ротора, зрушеного відносно ротора сельсина - датчика на 90°. Напруга Uвих змінюється за законом синуса.
8.3. План роботи 8.3.1. Індикаторний режим роботи сельсинів. Зберіть схему згідно рис. 8.1.
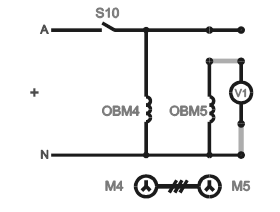
Рис. 8.1. Увімкніть стенд перемикачем S1, схему лабораторної роботи тумблером S10. Повертаючи сельсин - датчик М4, вимірювати кут повороту сельсин - приймача М5. 8.3.2. Трансформаторний режим роботи сельсинів. Зберіть схему згідно рис. 8.2. Увімкніть стенд перемикачем S1, схему лабораторної роботи тумблером S10. Повертаючи ротор сельсина-датчика М4 і зафіксувавши ротор сельсина - приймача М5 знімається залежність напруги (вольтметр V1) від кута повороту М4.
Рис 8.2. 8.4. Контрольні питання 8.4.1. Розкажіть про принцип дії сельсинів в індикаторному і трансформаторному режимах. 8.4.2. Як визначається точність сельсинів? 8.4.3. Розкажіть про пристрій сельсинів.
|
Последнее изменение этой страницы: 2019-06-20; Просмотров: 262; Нарушение авторского права страницы