|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Радиовысотомер с измерителем частоты следящего типаСтр 1 из 5Следующая ⇒
Радиовысотомер с измерителем частоты следящего типа
Лучшей точностью обладает РВ со следящим измерителем частоты на основе частотного дискриминатора, обеспечивающим согласование полосы пропускания тракта обработки с шириной спектра сигнала разностной частоты. Рассмотрим принцип работы следящего РВ, основанного на измерении периода модуляции. Структурная схема, поясняющая метод измерения высоты, применяемый в РВ, показана на рис.
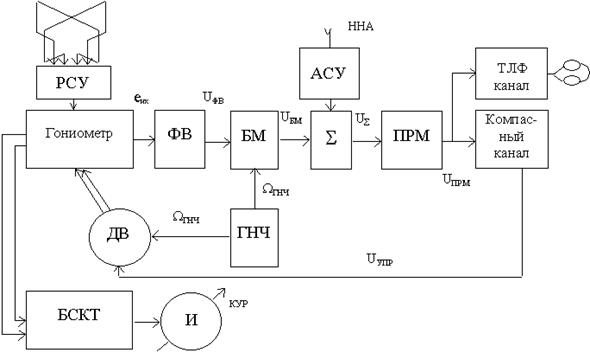
Принципы построения АРК Автоматические радиокомпасы могут строиться как следящие системы замкнутого или разомкнутого типа по схеме с балансной модуляцией. На рис показана упрощенная структурная схема АРК замкнутого типа. По такому принципу построены АРК-15М и АРК-22. Как видно из рис, АРК замкнутого типа представляет собой автоматическую следящую систему. Входным воздействием следящей системы является текущий КУР Q, а выходным воздействием - угол поворота ИК гониометра a. Сигнал рассогласования следящей системы при этом равен Δ Q = Q – a. На схеме: ФВ - фазовращатель; БМ- балансный модулятор; S- сумматор; АСУ- антенное согласующее устройство; РСУ- рамочное согласующее устройство; БСКТ - бесконтактный синусно-косинусный трансформатор; ГНЧ – генератор низкой частоты.
Упрощенная структурная схема АРК замкнутого типа.
Сигнал с выхода гониометра поступает на фазовращатель, где производится его фазовый сдвиг на p/2 для согласования по фазе с сигналом, принятым ненаправленной антенной. Сигнал с выхода ГНЧ подается на балансный модулятор (коммутатор фазы), на выходе которого получаем сигнал, фаза которого коммутируется сигналом UГНЧ(t) с частотой WГНЧ. В существующих АРК выбирают FГНЧ = WГНЧ /2 p = (90 ¸ 135) Гц. Напряжение uА с выхода ННА после предварительного усиления в согласующем усилителе (АСУ) поступает одновременно с выходным напряжением БМ в контур сложения (Σ ). Учитывая, что сигнал РА сдвигается по фазе на p/2, на входах контура сложения сигналы находятся в фазе или противофазе. В результате сложения таких сигналов на выходе контура сложения образуется амплитудно-модулированный сигнал uКС. Наличие амплитудной модуляции у результирующего сигнала свидетельствует о том, что направление прихода радиоволн не совпадает с направлением нулевого приема направленной антенной системы. Поскольку амплитудно-модулированный (АМ) сигнал образуется в самом приемнике АРК в результате сложения сигналов ННА и РА, имеет место так называемая внутренняя амплитудная модуляция. Анализируя сигнал на выходе КС, можно сделать следующие выводы: информация о стороне отклонения направления на пеленгуемую ПРС от направления нулевого пеленга заключается в фазе высокочастотного сигнала РА. В результате сложения сигналов ННА и РА происходит перенос этой информации в фазу результирующего сигнала. глубина модуляции суммарного сигнала несет информацию о величине отклонения направления на пеленгуемую ПРС от направления нулевого пеленга. Таким образом, балансный модулятор и контур сложения обеспечивают трансформацию информации о КУР из фазы высокочастотного сигнала в фазу огибающей, частота которой определяется ГНЧ. Кроме этого, БМ обеспечивает коммутацию суммарной ДН АРК Следует особо подчеркнуть, что величина коэффициента внутренней АМ m( Q) пропорциональна отклонению равносигнального направления, образованного переключением кардиоиды, от направления на ПРС, т.е. курсового угла радиостанции. В приемнике АРК суммарный сигнал U S(t) усиливается, преобразуется в сигнал промежуточной частоты и детектируется амплитудным детектором. С выхода приемника продетектированный сигнал подается в телефонный канал, где выделяется сигнал внешней АМ, поступающий далее на головные телефоны летчика для прослушивания позывных пеленгуемой ПРС. Одновременно сигнал поступает в узкополосный компасный канал АРК, где после фильтрации и усиления формируется управляющее напряжение. Управляющее напряжение с выхода УКК с частотой F гнч поступает на управляющую обмотку двигателя привода искательной катушки гониометра. На обмотку возбуждения двигателя подается напряжение непосредственно с генератора низкой частоты. Двигатель поворачивает искательную катушку до тех пор, пока напряжение на её выходе еик не станет равным нулю. При этом одновременно информация о КУР передается на индикатор КУР. Рассмотренный АРК является следящей системой с астатизмом первого порядка. Так как при переключении кардиоиды формируются два равносигнальных направления, сдвинутые на 180°, то в принципе система слежения может отработать любое из них, что соответственно приведет к ошибке пеленгования на 180°. Для исключения этого в цепи обратной связи АРК фазовые соотношения выбраны так, что положение искательной катушки в направлении обратного пеленга является неустойчивым, а в направлении прямого пеленга- устойчивым положением равновесия следящей системы. В радиокомпасе АРК-22 реализован несколько иной принцип переноса информации о направлении на пеленгуемую ПРС в параметр сигнала, подлежащего обработке. В отличие от рассмотренной схемы в АРК-22 нет фазоинверсного каскада, поэтому сигналы на входах контура сложения сдвинуты по фазе относительно друг друга на p/2. В результате сигнал на выходе контура сложения будет модулирован по амплитуде и фазе, причем информация о КУР будет содержаться именно в законе фазовой модуляции (ФМ). По этой причине АРК-22 называется радиокомпасом с внутренней фазовой модуляцией. Для выделения информации о КУР и формирования управляющего напряжения, подаваемого на двигатель, в данном АРК используется синхронный фазовый детектор. Следует отметить, что АРК с внутренней ФМ имеют лучшие характеристики по точности и помехоустойчивости по сравнению с АРК с АМ. Для АРК с ФМ понятие кардиоиды утрачивает смысл.
АРК с внутренней ФМ В общем виде структурная схема АРК с ФМ отличается от схемы АРК с внутренней АМ лишь отсутствием фазовращателя на p/2 в цепи между гониометром и балансным модулятором. Вследствие этого на первый вход БМ поступает сигнал вида е ИК ( t)= Е m ИК sin ( a – Q) cos w0 t.
Тогда на выходе БМ получим
u Б М (t) = u ИК (t) u ГНЧ (t) = Um БМ sin W ГНЧt sin ( a – Q) cos w0t.
На выходе сумматора образуется напряжение, представляющее собой сумму двух высокочастотных сигналов u Б М(t) и u А(t), имеющих фазовый сдвиг на ± p ¤2 вида
u S(t) = Um А sin w0t + u ГНЧ(t) = Um БМ sin W ГНЧ t sin ( a – Q) cos w0t. (5.45)
то формулу (5.45) можно представить в виде
u S ( t) = Um å sin ( w0 t + j), (5.46)
где
j = arctg [m( Q )sin W ГНЧ t];
При сложении сигналов РА и ННА согласно (5.45) суммарная ДН антенной системы имеет вид не кардиоиды, а эллипса, причем равносигнальное направление в этом случае не образуется. При угле Q = 0, 180, суммарная ДН определяется ДН ННА. На остальных направлениях суммарная ДН определяется геометрической суммой сигналов по формуле (5.45). Из анализа формулы (5.46) можно сделать следующие выводы: сигнал u S(t) на выходе сумматора промодулирован по амплитуде и фазе; глубина внутренней ФМ зависит от рассогласования ( a– Q); внутренняя амплитудная модуляция имеет гармоники 2 W ГНЧ, 4 W ГНЧ и т.д. Во многом работа АРК с ФМ аналогична радиокомпасу с АМ. Исключение составляет то, что в приемнике вместо амплитудного используется фазовый детектор, перед подачей на вход которого сигнал ограничивается по амплитуде. Если отклонение искательной катушки гониометра a - Q=0, то еик(t)=0 и j(t)= 0, т.е. фазовая модуляция отсутствует, u УПР(t) = 0 и двигатель прекращает вращение искательной катушки. Если a ¹ 0, то е ИК(t) ¹ 0, j(t) ¹ 0 и на выходе сумматора присутствует сигнал u S(t), промодулированный по фазе и амплитуде. При этом uупр(t) ¹ 0 и двигатель следящей системы АРК отрабатывает сигнал рассогласования ( a - Q). Достоинствами АРК с внутренней ФМ являются: отсутствие перемодуляции при нарушении баланса амплитуд, что повышает точность измерения КУР; повышенная помехоустойчивость вследствие уменьшения влияния помех на сигнал ошибки; отсутствие влияния на точность пеленгования внешней амплитудной модуляции сигнала за счет использования амплитудного ограничителя на входе фазового детектора.
АРК разомкнутой схемы
Основным недостатком АРК с гониометром следует считать наличие механических подвижных элементов в схеме (подвижная РА, искательная катушка гониометра, двигатель отработки и т.д.). АРК, построенные по разомкнутой схеме определения КУР, не имеют механических подвижных деталей и свободны от этого недостатка. Основным принципом работы АРК такой схемы (рис.5.11) является формирование низкочастотного информационного сигнала, фазовый сдвиг которого относительно опорного сигнала пропорционален КУР.
Рис.5.11. Структурная схема АРК разомкнутого типа.
Данный сигнал подается на контур сложения (КС), где складывается с сигналом ННА. При этом образуется информационный амплитудно-модули-рованный сигнал (при балансе амплитуд Е А=Е ) вида
eинф (t) = E [1 + sin( W t+ Q )] sin w 0 t ,
где Q - фаза огибающей амплитудной модуляции. Низкочастотная огибающая информационного сигнала выделяется амплитудным детектором и сравнивается по фазе с опорным сигналом, формируемым ГНЧ. Разность фаз этих сигналов соответствует КУР. Эту информацию обычно выделяют аналого-цифровым преобразователем и подают на цифровой индикатор. По разомкнутой схеме построен радиокомпас АРК-25.
Ночной эффект С наступлением темноты средние волны отражаются от слоя Е ионосферы. В переходный период между днем и ночью, особенно в течение двух часов до и после восхода и захода Солнца наблюдаются значительные вариации электронной концентрации ионосферы. В результате в точку приема приходят сигналы поверхностной волны совместно с отраженной от ионосферы, наблюдаются явления замирания сигнала, искажается фазовый фронт и поляризация суммарного сигнала. Ошибка пеленгации может достигать нескольких десятков градусов. Уменьшение ошибки возможно за счет уменьшения дальности использования АРК в 2-3 раза относительно номинальной, т.е. до 150 км.
Береговой эффект
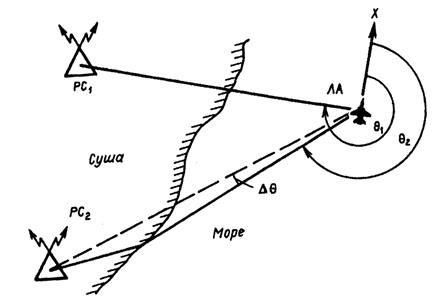
Береговой эффект представляет собой явление рефракции (преломления) радиоволн в горизонтальной плоскости, происходящее на границе раздела двух сред с разной скоростью распространения радиоволн (в частности, суша–море), обусловленной различием электромагнитных параметров этих сред. При переходе через границу суша–море нарушается прямолинейность распространения радиоволн, что приводит к ошибкам определения КУР (рис.5.12). Радиоволна преломляется тем сильнее, чем больше отличается угол между береговой линией и направлением распространения радиоволн от 90°. Ошибки, вызванные береговым эффектом, достигают 5…7°. Явление рефракции наблюдается лишь вблизи земной поверхности (порядка нескольких длин волн) и быстро исчезает при удалении от границы суша–море.
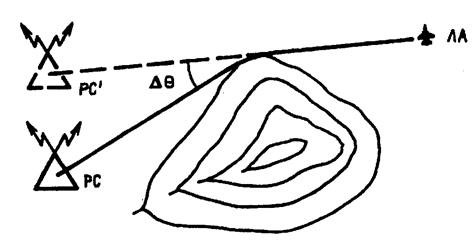
Рис.5.12. Береговой эффект Горный эффект Горный эффект (рис.5.13) состоит в том, что электромагнитные волны, встречая на пути своего распространения неровности земной поверхности, наводят в них электрические токи, которые создают вторичное электромагнитное поле вблизи этих неровностей. Вторичное поле, взаимодействуя с основным, искажает его. Помимо такой интерференции искажение основного электромагнитного поля происходит также за счет огибания встречающихся неровностей.
Рис.5.13. Горный эффект
Величина ошибок АРК, вызванных горным эффектом, зависит от высоты гор и расстояния до них, длины волны пеленгуемой радиостанции, истинной высоты полета ЛА. При высоте гор 300…1500 м ошибка сказывается на расстоянии 8…10 км от горы, при высоте 1500…4000 м – на расстояниях 20…40 км. При полете над горной долиной ниже высоты окружающих гор при пеленговании радиостанции, расположенной в той же долине на расстоянии не менее 10 км от гор, ошибка не превышает 5°. В других условиях, особенно при высоте полета порядка 300 м, ошибки определения КУР могут достигать величины 90°. Наибольшие ошибки наблюдаются в том случае, если самолет находится между радиостанцией и наивысшей точкой. При нахождении ЛА за перевалом ошибки пеленгования уменьшаются, а на расстоянии 30 - 40 км от гор ошибка практически отсутствует. Скорость колебания стрелки указателя КУР АРК при высоте полета 900…1200 м над горами примерно равна 20°/с. Более быстрые колебания и развороты стрелки указателя на ±90° указывают на то, что самолет снизился до высоты меньше 300 м над горами, поэтому есть опасность столкновения с отдельными вершинами.
Основные особенности СРНС 1. Размещение передающих станций на НИСЗ, перемещающихся со скоростями, большими скоростей ЛА, что приводит к значительному доплеровскому сдвигу частоты принимаемых сигналов. 2. Использование диапазона СВЧ для измерения навигационных параметров (при прохождении сигнала через слои ионосферы). 3. Охват значительной части или всей территории земной поверхности (глобальной рабочей зоны). 4. Низкая энергетика радиолиний НИСЗ-ЛА ввиду значительных расстояний, проходимых радиосигналами и ограничений на массу и габариты передающей аппаратуры, что ограничивает мощность излучаемого сигнала. 5. Необходимость наличия на борту ЛА информации об эфемеридах НИСЗ. 6. Необходимость коррекции параметров орбит НИСЗ. Существует около 30 проектов СРНС, разработанных фирмами разных стран. Основными из них являются: Навстар и Глонасс – сетевые среднеорбитальные системы, пассивные, непрерывного действия, глобальные, с определением МП на потребителе доплеровским методом. Транзит и Цикада – низкоорбитальные, пассивные, дискретного действия, глобальные, с определением МП на потребителе доплеровским методом.
Точка П наименьшего удаления орбиты от фокуса (hn) называется перигеем, а точка А орбиты, наиболее удаленная от фокуса, называется апогеем. Пространственное положение орбиты относительно Земли характеризуется следующими параметрами: - углом наклонения орбиты i, т.е. углом между плоскостью экватора и плоскостью орбиты; - долготой WВ восходящего узла, т.е. долготой точки пересечения плоскости орбиты с экватором. В которой спутник переходит из южного полушария в северное. Эта точка называется восходяшим узлом; - аргументом перигея w, т.е. углом между линией узлов (линией пересечения плоскостей орбиты и экватора) и линией аспид. Положение спутника на орбите относительно плоскости земного экватора можно характеризовать также углом u, называемым аргументом широты, который равен сумме истинной аномалии и аргумента перегея, т.е. u= w+ u Система параметров, включающая: - большую полуось а; - эксцентриситет е; - угол наклонения орбиты i; - долготу восходящего узла WВ; - аргумент перегея w; - истинную аномалию u, называется системой кеплеровых элементов орбиты. Кеплеровы элементы однозначно определяют закон движения НИСЗ и его положение в пространстве. Принцип действия системы Навигационной аппаратурой потребителей системы ГЛОНАСС выполняются бсззапросные измерения псевдодальности и радиальной псевдоскорости до четырех НИСЗ, а также прием и обработка навигационных сообщений, содержащихся в навигационных радиосигналах. В навигационном сообщении описывается положение спутника в пространстве и времени. В результате обработки полученных измерений и принятых навигационных сообщений определяются три координаты потребителя, три составляющие вектора скорости его движения, а также осуществляется " привязка'" шкалы времени потребителя к шкале Госэталона Координированного Всемирного времени UTC(SU). В составе навигационного сообщения также передаются данные, обеспечивающие планирование сеансов навигационных определений, выбор рабочего созвездия НИСЗ и обнаружение передаваемых ими радиосигналов, НИСЗ излучают непрерывные фазоманипулированные по псевдослучайному закону навигационные сигналы пониженной точности ПТ и высокой точности ВТ в двух частотных поддиапазонах (L1 ~ 1, 6 ГГц и L2 ~ 1, 2 ГГц). На частотах поддиапазона L1 излучаются сигналы ПТ и ВТ, а на частотах поддиапазоиа L2 – только сигнал ВТ. Сигнал ПТ с тактовой частотой 0, 511 МГц предназначен для использования отечественными и зарубежными гражданскими потребителями Он доступен всем потребителям, которые оснащены соответствующей АП и в зоне видимости которых находятся спутники ГЛОНАСС Сигнал ВТ с тактовой частотой 5, 11 МГц модулирован специальным кодом и не доступен для использования без согласования с Министерством обороны Российской Федерации В системе ГЛОНАСС, в отличие от GPS, не используется режим преднамеренного ухудшения характеристик сигнала ПТ В системе GPS такая возможность предусмотрена, что делает невозможным ее использование всеми потребителями или существенно ухудшает точность определения ими координат в соответствии с задачами военного ведомства США Прием сигнала ВТ на частотах двух поддиапазонов позволяет устранить неизвестную дополнительную ионосферную задержку сигнала. которая зависит от частоты. Поэтому АП, способная принимать сигналы на двухчастотах, обладает более высокой точностью определения местоположения В системе ГЛОНАСС используется частотное разделение радиосигналов НИСЗ в обоих поддиапазонах L1 и L2. При этом разнос частот между соседними каналами составляет Df1=0, 5625 МГц и Df2 = 0, 4375 МГц и выбран с учетом максимально возможных доплеровских сдвигов частот принимаемых сигналов. Каждый НИСЗ передает навигационные радиосигналы на собственных частотах поддиапазонов L1 и L2. НИСЗ, находящиеся в противоположных точках орбитальной плоскости (антиподные НИСЗ). могут передавать навигационные радиосигналы ив одинаковых частотах. В системе GPS используется кодовое разделение сигналов. При этом все НИСЗ излучают радиосигналы на одной и той же частоте поддиапазонов L1 и L2, но применяются различные коды ПТ и ВТ, получившие названия соответственно С/А-код и Р-код. Для измерения на борту ЛА временной задержки и доплеровского сдвига частоты принимаемого сигнала от НИСЗ необходимо знать момент времени и частоту его излучения. Для определения координат и составляющих скорости ЛА по измеренным задержкам и доплеровским сдвигам частоты принимаемых сигналов необходимо знать эфемериды НИСЗ на момент решения навигационной задачи. Таким образом, два этих условия требуют, чтобы навигационный сигнал, излучаемый каждым НИСЗ, содержал как навигационную, так и служебную информацию. Структура сигналов СРНС Каждый НС системы излучает непрерывные фазоманипулированные по псевдослучайному закону навигационные сигналы: - сигнал ПТ (пониженной точности), достаточно легко обнаруживаемый и доступный любым пользователям; - сигнал ВТ (высокой точности), трудно обнаруживаемый и доступный ограниченному кругу пользователей, прежде всего военным. Каждый НС излучает навигационные сигналы на двух частотах f1 и f2 лежащих в диапазонах частот вблизи 1600 МГц и 1240 МГц соответственно. При этом на частоте f1 излучаются сигналы ПТ и ВТ, а на частоте f2 - только сигнал ВТ. Прием сигнала ВТ на двух частотах позволяет устранить неизвестную дополнительную ионосферную задержку сигнала, которая зависит от частоты. Поэтому аппаратура, способная принимать сигналы на двух частотам, обладает более высокой точностью определения местоположения. В системе ГЛОНАСС используется частотное разделение каналов, выделенных каждому НС для излучения навигационных сигналов. При этом разнос частот между соседними каналами (Δ f1==0, 5625 МГц и Δ f2=0, 4375 МГц) выбран с учетом доплеровских сдвигов частот принимаемых сигналов. Для измерения на борту ЛА временной задержки и доплеровского сдвига частоты принимаемого сигнала от НС необходимо знать момент времени и частоту его излучения. Для определения координат и составляющих скорости ЛА по измеренным задержкам и доплеровским сдвигам частоты принимаемых сигналов необходимо знать эфемериды НС на момент решения навигационной задачи. По этой причине излучаемый каждым НС навигационный сигнал содержит как навигационную, так и служебную информацию. Вид используемого навигационного сигнала выбирается исходя из требований получения высокой точности измерения временной задержки и доплеровского сдвига частоты. Это достигается применением широкополосных, так называемых псевдошумовых сигналов, обеспечивающих увеличение базы сигнала В=ТЭФΔ F ЭФ, где ТЭФ – эффективная длительность, Δ F ЭФ – эффективная ширина спектра сигнала. Получение псевдошумового сигнала обеспечивается манипуляцией по фазе специальным дальномерным кодом гармонического сигнала (несущей), вырабатываемого БЭВЧ.
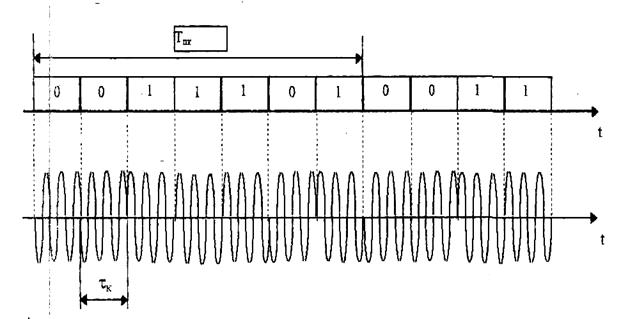
Точность измерения дальности будет тем выше, чем меньше длительность τ к элемента кода. Период повторения кода Тпк определяет интервал однонозначного измерения дальности, который в этом случае равен Dодн=c Тпк. Сигнал ПТ формируется девятиразрядным регистром сдвига. Образующий полином имеет вид G(x)= 1 + х5 + х9. Период повторения Тпк = 1мс, длительность элемента кода τ к = 2 мкс. Сигнал ВТ имеет существенно больший период повторения кода при длительности элемента кода τ к = 0, 2 мкс. Для системы «Навстар» например, период кода сигнала высокой точности составляет около 267 суток. Момент времени, соответствующий формированию и излучению каждым спутником i-гo элемента кода сигнала ПТ и ВТ, жестко связан с системным временем и априорно известен в точке приема, как и частота излучаемого сигнала. Если шкала времени, создаваемая БЭВЧ ЛА, синхронизирована с системным временем СРНС, то измеренная бортовой аппаратурой ЛА задержка между априорно известным моментом излучения и моментом приема i-гo элемента, кода сигнала пропорциональна дальности до НС. Служебная информация, т.е. эфемериды, поправки к шкале времени НС, поправки на распространение радиоволн и другая информация необходимая для точного и надежного определения местоположения и скорости ЛА, передается одновременно с навигационным сигналом путем его дополнительной низкочастотной фазовой манипуляции. Разделение излучаемых на одной частоте f1 сигналов ПТ и ВТ производится тем, что сигнал ПТ образуется фазовой манипуляцией на 0, p, а сигнал ВТ - манипуляций на ±p/2. В системе ГЛОНАСС служебная информация передается 5-ю кадрами в виде потока цифровой информации со скоростью 50 бит в секунду Кадр служебной информации содержит 1500й бит информации и занимает 30 с. Радиовысотомер с измерителем частоты следящего типа
Лучшей точностью обладает РВ со следящим измерителем частоты на основе частотного дискриминатора, обеспечивающим согласование полосы пропускания тракта обработки с шириной спектра сигнала разностной частоты. Рассмотрим принцип работы следящего РВ, основанного на измерении периода модуляции. Структурная схема, поясняющая метод измерения высоты, применяемый в РВ, показана на рис.
|
Последнее изменение этой страницы: 2020-02-16; Просмотров: 142; Нарушение авторского права страницы
 Поскольку можно записать
Поскольку можно записать ;
;  .
.
 e S (t) = E [sin Q cos W t + cos Q sin W t] sin w 0 t = E sin( W t + Q ) sin w 0 t.
e S (t) = E [sin Q cos W t + cos Q sin W t] sin w 0 t = E sin( W t + Q ) sin w 0 t.