
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Способы повышения точности частотных РВ
Точность измерения высоты частотными РВ зависит от многих факторов. К основным составляющим результирующей ошибки РВ относятся: · методические ошибки, вызванные: -периодичностью закона частотной модуляции; -измерением средней Fpср, а не минимальной Fp0 частоты спектра разностного сигнала; - неучетом влияния доплеровского смещения частоты при изменении профиля полета ЛА; - дискретностью отсчета высоты; · динамическая ошибка; · флуктуационная ошибка; · ошибка индикации (указателя высоты); · аппаратурные ошибки, вызванные нестабильностью закона частотной модуляции и другие. Аппаратурные ошибки частотного РВ возникают вследствие нестабильности девиации частоты Df и частоты модуляции Fм, нестабильности частоты генератора СВЧ колебаний. Уменьшение влияния таких ошибок достигается применением в РВ схем автокалибровки постоянной радиовысотомера, определяемой выражением
Ошибки индикации определяются классом точности указателя высоты и могут быть уменьшены при использовании индикаторов с цифровым отсчетом. Флуктуационная ошибка измерения высоты обусловлена случайным характером сигнала разностной частоты и действием внутренних шумов приемника. Для уменьшения этой ошибки необходимо обеспечивать максимально возможное отношение сигнал/шум на входе измерителя разностной частоты, уменьшать полосу пропускания приемного тракта, добиваться уменьшения ширины спектра сигнала разностной частоты.
Периодический характер закона модуляции приводит к наличию зон обращения, что является причиной появления методической ошибки измерения высоты. Однако при условии tН < < ТМ, которое обычно выполняется в РВ малых высот, данная ошибка весьма незначительна. Во многих частотных РВ для измерения разностной частоты используется счетчик импульсов, формируемых из сигнала разностной частоты. Это приводит к появлению характерной для данного метода измерений методической ошибки дискретности счета, связанной с нарушением кратности периода модуляции Тм и периода сигнала разностной частоты Тр0 = 1/Fp0.
При измерении высоты полета Н изменяется разностная частота Fp0, а следовательно, и число формируемых импульсов N0. Счетчик фиксирует только целые числа импульсов, соответствующие определенным уровням высоты. В промежутках между этими уровнями РВ будет давать показания, соответствующие ближайшему целому значению. В этом и состоит причина появления методической ошибки, обусловленной дискретностью счета, когда измеряемый параметр (высота) изменяется непрерывно, а измеритель фиксирует только определенные её дискретные значения.
Величина ошибки дискретности отсчета высоты
Анализ данного выражения показывает, что методическая ошибка измерения высоты из-за дискретности отсчета зависит только от девиации частоты и уменьшается при увеличении Df. Однако при увеличении девиации частоты Df расширяется спектр сигнала разностной частоты, что приводит к увеличению флуктуационной ошибки. На практике Df = 25¸ 50 МГц, при этом методическая ошибка дискретности отсчета высоты составляет DН = 0, 75¸ 1, 5 м, т.е. является достаточно большой. Для уменьшения методической ошибки дискретности отсчета, в современных РВ используется двойная частотная модуляция, когда по определенному закону изменяется параметр закона основной модуляции. При этом различают РВ с переменной средней частотой и с переменной девиацией частоты. Закон изменения частоты излучаемых колебаний в РВ с переменной средней частотой имеет вид
Средняя частота излучения f0 изменяется с частотой модуляции FмДОП и девиацией частоты DfДОП. Частота дополнительной модуляции FмДОП < FмОСН, при этом выполняются условия
На выходе БС формируется сигнал разностной частоты Fр= fпрд – fпрм, несущий информацию о высоте:
где Н – высота полета; Ти – период перестройки частоты ПРД в пределах полосы частотной модуляции Df. В состав приемника, кроме БС, входят усилитель низкой частоты (УНЧ) и бинарный квантователь (БК). Выходной сигнал БС усиливается УНЧ до уровня, необходимого для устойчивой работы схемы слежения за его частотой. При этом полезный сигнал фильтруется от шумов и помех, а необходимое значение коэффициента усиления устанавливается двоичным кодом, поступающим на соответствующий вход УНЧ из управителя и являющимся функцией измеряемой высоты. Такая АРУ необходима для предотвращения ухудшения с высотой отношения сигнал/шум. БК контролирует выходной сигнал УНЧ, и если его уровень превышает пороговый, то подает на входы обнаружителя и дискриминатора импульсы, следующие с частотой Fр (т.е. преобразует выходной сигнал УНЧ в вид, необходимый для дальнейшей цифровой обработки). В РВ предусмотрены два основных режима работы: поиск и слежение. Переходу в режим «слежение» предшествует переходный режим – «захват». Обнаружитель контролирует преобразованный (импульсный) сигнал УНЧ и, если его уровень и спектральный состав соответствует допустимым значениям, замыкает кольцо слежения за частотой сигнала, отраженного от земной поверхности, подключив на вход управления выходной сигнал частотного дискриминатора. В этом режиме управитель регулирует скорость перестройки модулятором частоты ПРД таким образом, чтобы среднее значение частоты разностного сигнала Fрср оставалось постоянным, равным переходной частоте дискриминатора Fр0 (которая приблизительно равна 30 кГц). При этом схема стабилизации (СС) девиации частоты Df, воздействуя на модулятор, поддерживает постоянство полосы модуляции ПРД и длительность импульсов Ти (формируемых схемой стабилизации), определяемая формулой: где Тu - мера высоты Н. В случае отсутствия на выходе УНЧ сигнала с нужными характеристиками (т.е. когда спектр сигнала разностной частоты и его средняя частота Fрср не совпадают с полосой пропускания УНЧ), обнаружитель организует поиск по частоте сигнала, отраженного от земной поверхности. При этом управитель периодически изменяет скорость перестройки частоты ПРД и усиление УНЧ от значений, соответствующих нулевой высоте, до соответствующих максимальной измеряемой высоте. При этом спектр сигнала разностной частоты перемещается по оси частот. Когда значительная часть мощности сигнала разностной частоты будет попадать в полосу пропускания УНЧ (которая формируется фильтрами верхних и нижних частот), то обнаружитель выдаст в преобразователь время-код (ПВК) и встроенную систему контроля (ВСК) сигнал «Захват», разрешающий обработку импульсов Ти с целью извлечения информации о высоте. Для обеспечения постоянства девиации частоты (параметра РВ, влияющего на точность измерения высоты) служит блок высокодобротных резонаторов (БР), содержащий два резонатора. Один из них настроен на верхнюю частоту fн.в, другой – на нижнюю частоту fн.н. Разность частот настройки резонаторов определяет эталонную полосу частотной модуляции Df. При достижении частоты сигнала передатчика значений, близких к частотам настройки резонаторов, на их выходах образуются сигналы, которые поступают на схему стабилизации Df, где формируется измерительный интервал – импульс Тu, длительность которого определяется разностью времен срабатывания резонаторов. ПВК преобразует длительность импульсов Тu в параллельный двоичный код, который в течение паузы между импульсами Тu передается в микропроцессорный вычислитель (МПВ), после чего микропроцессор производит установку нуля на выходе ПВК. Микропроцессор в процессе работы выполняет следующие функции: - после включения электропитания РВ загружает в оперативную память все необходимые константы и проводит самоконтроль; - прием из ПВК измеренного текущего значения высоты и установленной остаточной высоты в параллельном двоичном коде; - фильтрацию текущего значения высоты от ошибок, вызванных доплеровским смещением частоты. Усреднение результата по нескольким периодам модуляции передатчика для уменьшения методической погрешности измерений, не зависящей от уровня сигнала; - вычисление текущего значения истинной высоты (вычитание остаточной высоты из измерений); - обмен по прерыванию информацией с выходным преобразователем (ПКК) параллельного кода в последовательный трехуровневый; - самоконтроль и проверку правильности функционирования ПКК. ПКК собирает информацию, необходимую для формирования выходного 32-разрядного слова, соответствующим образом группируя ее, и передает на входы внешних устройств (индикатора высоты, САУ и др.). ВСК собирает информацию мониторов, контролирующих состояние основных узлов радиовысотомера, и формирует соответствующие значения разрядов информационного слова, сигнализируя потребителям информации исправен радиовысотомер или нет, находится ли он в режиме измерения высоты или проводится контроль. Кроме этого, приемопередатчик РВ обеспечивает выдачу информации об измеряемой высоте в виде постоянного напряжения, формируемого преобразователями длительности импульсов Тu в напряжения Uн1 и Uн2, а также разовые сигналы, которые схема выдачи разовых сигналов (СРС) выдает, как только аналоговое напряжение становится меньше значения соответствующего опорного напряжения. ВСК контролирует также коэффициент пропорциональности между длительностью сигнала Тu и значением аналогового напряжения. Если все устройства приемопередатчика и антенны работают нормально, ВСК выдает сигнал «Исправность», а если при этом обнаружитель выдает сигнал «Захват», то выдается также сигнал «Разрешение использования информации». Реле, управляемое сигналом «Исправность», подключает аналоговый сигнал высоты Вых. Нув к входу указателя высоты. Как было указано выше для перевода радиовысотомера из режима поиска сигнала в режим слежения и обратно в блоке существует отдельное функциональное устройство - обнаружитель, решающее задачу обнаружения сигнала разностной частоты на фоне шумов тракта его приема и обработки. При этом задачу обнаружения сигнала целесообразно решать, анализируя сигналы на выходе дискриминатора и приемника. В режиме поиска спектр сигнала разностной частоты не совпадает с частотой настройки дискриминатора и на выходе дискриминатора присутствуют только шумы. Обнаружитель должен иметь такие параметры, чтобы не происходило ложного обнаружения наличия сигнала по шумам на выходе дискриминатора (такое событие в теории оптимального обнаружения называется ложная тревога). В тоже время из-за наличия шумов обнаружитель может не определить факт наличия сигнала на выходе дискриминатора (такое событие в теории оптимального обнаружения называется пропуск цели) и радиовысотомер будет продолжать находиться в режиме поиска сигнала. Таблица 1.1
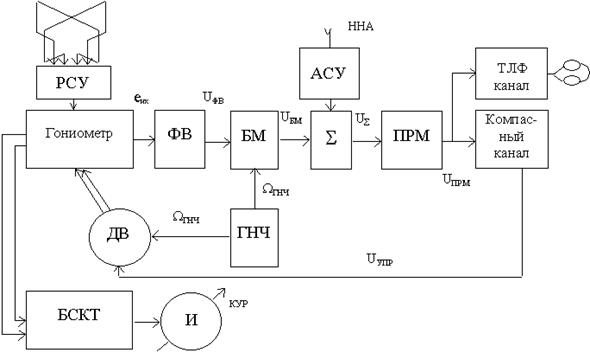
Принципы построения АРК Автоматические радиокомпасы могут строиться как следящие системы замкнутого или разомкнутого типа по схеме с балансной модуляцией. На рис показана упрощенная структурная схема АРК замкнутого типа. По такому принципу построены АРК-15М и АРК-22. Как видно из рис, АРК замкнутого типа представляет собой автоматическую следящую систему. Входным воздействием следящей системы является текущий КУР Q, а выходным воздействием - угол поворота ИК гониометра a. Сигнал рассогласования следящей системы при этом равен Δ Q = Q – a. На схеме: ФВ - фазовращатель; БМ- балансный модулятор; S- сумматор; АСУ- антенное согласующее устройство; РСУ- рамочное согласующее устройство; БСКТ - бесконтактный синусно-косинусный трансформатор; ГНЧ – генератор низкой частоты.
Упрощенная структурная схема АРК замкнутого типа.
Сигнал с выхода гониометра поступает на фазовращатель, где производится его фазовый сдвиг на p/2 для согласования по фазе с сигналом, принятым ненаправленной антенной. Сигнал с выхода ГНЧ подается на балансный модулятор (коммутатор фазы), на выходе которого получаем сигнал, фаза которого коммутируется сигналом UГНЧ(t) с частотой WГНЧ. В существующих АРК выбирают FГНЧ = WГНЧ /2 p = (90 ¸ 135) Гц. Напряжение uА с выхода ННА после предварительного усиления в согласующем усилителе (АСУ) поступает одновременно с выходным напряжением БМ в контур сложения (Σ ). Учитывая, что сигнал РА сдвигается по фазе на p/2, на входах контура сложения сигналы находятся в фазе или противофазе. В результате сложения таких сигналов на выходе контура сложения образуется амплитудно-модулированный сигнал uКС. Наличие амплитудной модуляции у результирующего сигнала свидетельствует о том, что направление прихода радиоволн не совпадает с направлением нулевого приема направленной антенной системы. Поскольку амплитудно-модулированный (АМ) сигнал образуется в самом приемнике АРК в результате сложения сигналов ННА и РА, имеет место так называемая внутренняя амплитудная модуляция. Анализируя сигнал на выходе КС, можно сделать следующие выводы: информация о стороне отклонения направления на пеленгуемую ПРС от направления нулевого пеленга заключается в фазе высокочастотного сигнала РА. В результате сложения сигналов ННА и РА происходит перенос этой информации в фазу результирующего сигнала. глубина модуляции суммарного сигнала несет информацию о величине отклонения направления на пеленгуемую ПРС от направления нулевого пеленга. Таким образом, балансный модулятор и контур сложения обеспечивают трансформацию информации о КУР из фазы высокочастотного сигнала в фазу огибающей, частота которой определяется ГНЧ. Кроме этого, БМ обеспечивает коммутацию суммарной ДН АРК Следует особо подчеркнуть, что величина коэффициента внутренней АМ m( Q) пропорциональна отклонению равносигнального направления, образованного переключением кардиоиды, от направления на ПРС, т.е. курсового угла радиостанции. В приемнике АРК суммарный сигнал U S(t) усиливается, преобразуется в сигнал промежуточной частоты и детектируется амплитудным детектором. С выхода приемника продетектированный сигнал подается в телефонный канал, где выделяется сигнал внешней АМ, поступающий далее на головные телефоны летчика для прослушивания позывных пеленгуемой ПРС. Одновременно сигнал поступает в узкополосный компасный канал АРК, где после фильтрации и усиления формируется управляющее напряжение. Управляющее напряжение с выхода УКК с частотой F гнч поступает на управляющую обмотку двигателя привода искательной катушки гониометра. На обмотку возбуждения двигателя подается напряжение непосредственно с генератора низкой частоты. Двигатель поворачивает искательную катушку до тех пор, пока напряжение на её выходе еик не станет равным нулю. При этом одновременно информация о КУР передается на индикатор КУР. Рассмотренный АРК является следящей системой с астатизмом первого порядка. Так как при переключении кардиоиды формируются два равносигнальных направления, сдвинутые на 180°, то в принципе система слежения может отработать любое из них, что соответственно приведет к ошибке пеленгования на 180°. Для исключения этого в цепи обратной связи АРК фазовые соотношения выбраны так, что положение искательной катушки в направлении обратного пеленга является неустойчивым, а в направлении прямого пеленга- устойчивым положением равновесия следящей системы. В радиокомпасе АРК-22 реализован несколько иной принцип переноса информации о направлении на пеленгуемую ПРС в параметр сигнала, подлежащего обработке. В отличие от рассмотренной схемы в АРК-22 нет фазоинверсного каскада, поэтому сигналы на входах контура сложения сдвинуты по фазе относительно друг друга на p/2. В результате сигнал на выходе контура сложения будет модулирован по амплитуде и фазе, причем информация о КУР будет содержаться именно в законе фазовой модуляции (ФМ). По этой причине АРК-22 называется радиокомпасом с внутренней фазовой модуляцией. Для выделения информации о КУР и формирования управляющего напряжения, подаваемого на двигатель, в данном АРК используется синхронный фазовый детектор. Следует отметить, что АРК с внутренней ФМ имеют лучшие характеристики по точности и помехоустойчивости по сравнению с АРК с АМ. Для АРК с ФМ понятие кардиоиды утрачивает смысл.
АРК с внутренней ФМ В общем виде структурная схема АРК с ФМ отличается от схемы АРК с внутренней АМ лишь отсутствием фазовращателя на p/2 в цепи между гониометром и балансным модулятором. Вследствие этого на первый вход БМ поступает сигнал вида е ИК ( t)= Е m ИК sin ( a – Q) cos w0 t.
Тогда на выходе БМ получим
u Б М (t) = u ИК (t) u ГНЧ (t) = Um БМ sin W ГНЧt sin ( a – Q) cos w0t.
На выходе сумматора образуется напряжение, представляющее собой сумму двух высокочастотных сигналов u Б М(t) и u А(t), имеющих фазовый сдвиг на ± p ¤2 вида
u S(t) = Um А sin w0t + u ГНЧ(t) = Um БМ sin W ГНЧ t sin ( a – Q) cos w0t. (5.45)
то формулу (5.45) можно представить в виде
u S ( t) = Um å sin ( w0 t + j), (5.46)
где
j = arctg [m( Q )sin W ГНЧ t];
При сложении сигналов РА и ННА согласно (5.45) суммарная ДН антенной системы имеет вид не кардиоиды, а эллипса, причем равносигнальное направление в этом случае не образуется. При угле Q = 0, 180, суммарная ДН определяется ДН ННА. На остальных направлениях суммарная ДН определяется геометрической суммой сигналов по формуле (5.45). Из анализа формулы (5.46) можно сделать следующие выводы: сигнал u S(t) на выходе сумматора промодулирован по амплитуде и фазе; глубина внутренней ФМ зависит от рассогласования ( a– Q); внутренняя амплитудная модуляция имеет гармоники 2 W ГНЧ, 4 W ГНЧ и т.д. Во многом работа АРК с ФМ аналогична радиокомпасу с АМ. Исключение составляет то, что в приемнике вместо амплитудного используется фазовый детектор, перед подачей на вход которого сигнал ограничивается по амплитуде. Если отклонение искательной катушки гониометра a - Q=0, то еик(t)=0 и j(t)= 0, т.е. фазовая модуляция отсутствует, u УПР(t) = 0 и двигатель прекращает вращение искательной катушки. Если a ¹ 0, то е ИК(t) ¹ 0, j(t) ¹ 0 и на выходе сумматора присутствует сигнал u S(t), промодулированный по фазе и амплитуде. При этом uупр(t) ¹ 0 и двигатель следящей системы АРК отрабатывает сигнал рассогласования ( a - Q). Достоинствами АРК с внутренней ФМ являются: отсутствие перемодуляции при нарушении баланса амплитуд, что повышает точность измерения КУР; повышенная помехоустойчивость вследствие уменьшения влияния помех на сигнал ошибки; отсутствие влияния на точность пеленгования внешней амплитудной модуляции сигнала за счет использования амплитудного ограничителя на входе фазового детектора.
АРК разомкнутой схемы
Основным недостатком АРК с гониометром следует считать наличие механических подвижных элементов в схеме (подвижная РА, искательная катушка гониометра, двигатель отработки и т.д.). АРК, построенные по разомкнутой схеме определения КУР, не имеют механических подвижных деталей и свободны от этого недостатка. Основным принципом работы АРК такой схемы (рис.5.11) является формирование низкочастотного информационного сигнала, фазовый сдвиг которого относительно опорного сигнала пропорционален КУР.
Рис.5.11. Структурная схема АРК разомкнутого типа.
Данный сигнал подается на контур сложения (КС), где складывается с сигналом ННА. При этом образуется информационный амплитудно-модули-рованный сигнал (при балансе амплитуд Е А=Е ) вида
eинф (t) = E [1 + sin( W t+ Q )] sin w 0 t ,
где Q - фаза огибающей амплитудной модуляции. Низкочастотная огибающая информационного сигнала выделяется амплитудным детектором и сравнивается по фазе с опорным сигналом, формируемым ГНЧ. Разность фаз этих сигналов соответствует КУР. Эту информацию обычно выделяют аналого-цифровым преобразователем и подают на цифровой индикатор. По разомкнутой схеме построен радиокомпас АРК-25.
|
Последнее изменение этой страницы: 2020-02-16; Просмотров: 81; Нарушение авторского права страницы



 ,
,  , где tн max- максимальная задержка сигнала при распространении от ЛА до земной поверхности и обратно.
, где tн max- максимальная задержка сигнала при распространении от ЛА до земной поверхности и обратно.
 ,
,  ,
, 
 Поскольку можно записать
Поскольку можно записать ;
;  .
.
 e S (t) = E [sin Q cos W t + cos Q sin W t] sin w 0 t = E sin( W t + Q ) sin w 0 t.
e S (t) = E [sin Q cos W t + cos Q sin W t] sin w 0 t = E sin( W t + Q ) sin w 0 t.