
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Радиотехнические системы ближней навигации метрового диапазона
Система типа VOR
Как уже отмечалось, в зарубежных СБН метрового диапазона типа VOR используется фазовый метод измерения азимута. При этом носителем информации может быть как фаза огибающей амплитудно-модулированных колебаний (системы типа М), так и фаза высокочастотного несущего колебания (системы типа Н). В системах типа М функциональная зависимость фазы огибающей амплитудно-модулированного колебания от направления излучения создается путем вращения слабонаправленной ДН антенной системы радиомаяка. Обычно используют антенны с ДН типа «кардиоида». В системах типа Н функциональная зависимость фазы высокочастотного несущего колебания от направления излучения создается путем вращения по окружности определенного радиуса ненаправленной антенны. При этом используется эффект Доплера, вследствие чего подобные системы также называют доплеровскими. Рассмотрим более подробно принцип создания функциональной зависимости между фазой огибающей амплитудно-модулированного колебания и направлением излучения на примере всенаправленного радиомаяка типа VOR. Пусть ДН передающей антенны радиомаяка в горизонтальной плоскости имеет вид кардиоиды (рис.7.1) и описывается выражением
F( Θ ) = 1 + cosΘ , (7.1)
где Θ – угол, отсчитываемый от максимума ДН..
Пусть передатчик радиомаяка вырабатывает непрерывные немодулированные высокочастотные колебания вида
u ( t ) = Um cos w 0 t, где Um – амплитуда колебаний поля; w 0 – несущая частота, которые излучаются с помощью антенны, имеющей ДН вида (7.1) Тогда при неподвижной ДН на борту ЛА, имеющего азимут Q 0, будут приниматься колебания вида
u пр (t) = K F( Q 0 )u(t) = KUm (1 + cos Q 0 ) cos w 0 t, где К - коэффициент пропорциональности. Если вращать ДН антенны против часовой стрелки с частотой W, то угловое положение радиостанции относительно максимума ДН будет изменяться во времени по закону
Q ( t ) = W t + Q 0.
Если считать, что в момент t =0 ДН совпадала направлением максимального приема с опорным направлением (направлением северного меридиана), то на вход приемного устройства с антенной системы будет поступать напряжение
u пр (t) = Um [1 + cos ( W t + Q 0 )] cos w 0 t, (7.2)
Как видно из выражения (7.2) при вращении ДН сигнал, поступающий от антенны приемного устройства, становится амплитудно-модулированным. Причиной появления амплитудной модуляции является вращение ДН радиомаяка. Огибающая этого АМ колебания
u нч (t) = Um cos ( W t + Q 0 ), (7.3)
содержит в значении текущей фазы
j с ( t ) = W t + Q 0 (7.3) информацию об азимуте (пеленге) ЛА. Для выделения этой информации в приемном устройстве необходимо иметь опорное колебание
u 0 ( t ) = Um 0 cos W t, несущее информацию о мгновенном положении ДН, т.е. имеющее текущую фазу, связанную с положением максимума ДН в данный момент времени
j 0 ( t ) = W t. (7.4) При наличии опорного колебания информация об азимуте ЛА может быть выделена с помощью фазометра, измеряющего разность фаз между огибающей АМ-сигнала (7.3) и опорным колебанием (7.4)
D j = j с ( t ) – j 0 ( t ) = Q 0.
Опорный сигнал передается радиомаяком по отдельному каналу связи, причем на той же частоте w 0, что и азимутальный. Разделение этих сигналов на приемной стороне происходит методом частотной селекции продетектированного по амплитуде комбинированного сигнала. Такая возможность появляется при использовании для передачи опорного сигнала двойной частотной модуляции. Упрощенная структурная схема радиомаяка типа VOR представлена на рис.7.2.
Высокочастотные колебания передатчика ПРД разделяются делителем мощности (ДМ) на два канала. Часть мощности поступает во вращающуюся азимутальную антенну А1 с ДН типа «кардиоида» и излучается, образуя азимутальный сигнал переменной фазы (7.2). Колебания, поступающие в модулируемый усилитель высокой частоты (МУВЧ), модулируются в нем по амплитуде частотно-модулируемыми поднесущими колебаниями, поступающими из оптико-механического модулятора (ОММ). Эти колебания излучаются ненаправленной антенной А2, образуя опорный сигнал. При этом частота модуляции (вращения) азимутальной антенны составляет 30 Гц, частота поднесущих колебаний – 9950 Гц. Вместо вращающейся антенны для получения сигнала переменной фазы могут использоваться неподвижные антенны, запитываемые через гониометрическое устройство для получения электронного вращения ДН. Упрощенная структурная схема бортового приемного устройства представлена на рис.7.3.
Антенна А принимает азимутальный и опорный сигналы одновременно. С учетом того, что эти сигналы формируются одним передатчиком и излучаются антеннами, имеющими общий фазовый центр, они являются когерентными и на выходе антенны А получается суммарное колебание вида
Спектр такого колебания имеет две дополнительные боковые составляющие, расположенные симметрично по обе стороны от несущей частоты ω 0 на расстоянии Ω . После преобразования этого сигнала в приемном устройстве, усиления его и детектирования амплитудным детектором получается огибающая суммарного сигнала, содержащая азимутальный и опорный сигналы вида
где Um 1 и Um 2 – соответственно амплитуды составляющих полного сигнала. Азимутальный и опорный сигналы из их смеси (7.60 модно выделить путем частотной селекции. С этой целью с выхода приемника ПРМ сигнал подается на два полосовых фильтра. В фильтре, настроенном на частоту Ω (f=30 Гц), выделяется азимутальный сигнал или сигнал переменной фазы, а в фильтре, настроенном на поднесущую частоту Ω п (f=9960 Гц), выделится частотно-модулированное поднесущее колебание. Опорное колебание выделяется после частотного детектирования поднесущего колебания в частотном детекторе. Таким образом, в результате преобразований получены азимутальный сигнал
U фд = КфдUmcos∆ φ ,
где Кфд – коэффициент передачи фазового детектора, содержит информацию об измеряемой разности фаз входных напряжений ∆ φ , и, следовательно, азимуте ЛА
Система типа DVOR Система типа DVOR основана на использовании эффекта Доплера, который вызывает фазовую модуляцию сигналов, принимаемых от вращающейся ненаправленной антенны радиомаяка. При этом фаза огибающей модуляции сигналов зависит от направления на источник излучения - радиомаяк. В простейшем случае передающая антенна радиомаяка представляет собой ненаправленный в горизонтальной плоскости вибратор А1, который перемещается по окружности радиуса R с частотой W (рис.7.4). Так как антенна при этом то приближается к приемнику, то удаляется от него, возникает эффект Доплера, вызывающий пространственно-фазовую модуляцию принимаемого сигнала.
На рис.7.4 показаны центральная антенна радиомаяка А2, расположенная в начале координат, и вращающаяся антенна А1 на расстоянии R от центральной антенны под углом a к начальной линии отсчета. Сигналы от антенн А1 и А2 принимаются в точке расположения ЛА с азимутом Q 0. Антенна А1 вращается по окружности радиуса R с угловой скоростью W =2π n, где n – частота вращения антенны. Линейная скорость вращения антенны V = W R. Тогда радиальная составляющая скорости по направлению Q 0
Vr = W sin ( a – Q 0 ). (7.7)
Текущее значение азимута антенны А1 a = W t. Когда t =0 и a =0, антенна находится на начальной линии отсчета. Подставив в формулу (7.7) величины V и a , получим
Vr = W R sin ( W t – Q 0 ). (7.8)
В этих условиях при приеме колебаний от вращающейся антенны А1 в точке приема возникает доплеровский сдвиг частоты F д = Vr /λ . С учетом формулы (7.8) получим
F д = W R sin ( W t – Q 0 )/λ . (7.9)
Обозначим F д m = W R /λ , тогда
F д = F д m sin ( W t – Q 0 ). (7.10)
Из выражения (7.100 видно, что доплеровская частота F д , полученная в результате вращения антенны А1, связана с азимутом ЛА Q 0. принимая такой сигнал на самолете, можно выделить напряжение вида
uA = UAm cos ( W t – Q 0 ) ,
фаза которого зависит от азимута. Используя центральную антенну А2, можно передать на борт опорное напряжение вида u о = U о m cos W t, фаза которого не зависит от азимута, и, сопоставив фазы этих сигналов между собой, определить азимут Q 0. Формат сигнала доплеровского радиомаяка DVOR выбирают одинаковым с форматом сигнала радиомаяка VOR, чтобы иметь возможность приема этих сигналов с помощью однотипной бортовой аппаратуры без какой-либо доработки или замены, с той лишь разницей, что азимутальный сигнал DVOR передается по частотно-модулированному каналу, а опорный сигнал передается по амплитудно-модулированному каналу. Основное достоинство доплеровских радиомаяков по сравнению с обычными состоит в высокой эффективности подавления влияния переотражений сигналов от местных предметов на точность работы, в результате чего точность повышается примерно в 10 раз. Радиопеленгаторы Все радиоугломерные (радиопеленгациоиные) методы и системы можно подразделить на фазовые, амплитудные и комбинированные. В свою очередь комбинированные методы радиопеленгации разделяют на амплитудно-фазовые (т.е. сочетающие свойства амплитудных и фазовых методов), частотные (использующие эффект Доплера) и импульсные (временные). Кроме того, в зависимости от особенностей применения и комплектации угломерные радиосистемы образуют две группы: радиопеленгаторные и радиомаячные. Радиопеленгаторная система состоит из источника радиоволн – передатчика (радиомаяка) с ненаправленным или слабонаправленным излучением и радиопеленгатора – приемного устройства, служащего для определения направления на источник радиоизлучения с помощью пеленгационных антенн. Радиопеленгаторы могут устанавливаться на земле для определения направления на бортовой радиопередатчик или на подвижном объекте (ЛА)для определения направления на радиостанцию, установленную на земле в точке с известными координатами. В последнем случае в качестве излучателей используют передатчики специальных навигационных радиостанций, называемых приводными радиостанциями. Оба типа радиопеленгаторных систем широко используются в авиации. Пеленгование ЛА с помощью наземных радиопеленгаторов позволяет осуществлять диспетчерский контроль за воздушным движением в районе аэродрома. Пеленгование наземных радиостанций с помощью бортовых радиопеленгаторов (радиокомпасов) обеспечивает управление полетом на радиостанцию и от нее в любом заданном направлении, а также оценку местонахождения ЛА. Радиомаячная угломерная система состоит из наземного радиомаяка и бортового приемоиндикатора. Антенные системы радиопеленгаторов всегда обладают направленными свойствами, в то время, как антенные системы радиомаяков могут иметь как направленное, так и ненаправленное излучение. Угломерный радиомаяк – это передающее радионавигационное устройство, создающее в пространстве определенные линии положения (обычно линии равных пеленгов) с помощью радиопеленгационных антенн. С использованием бортового приемоиндикатора определяется линия положения, на которой находится подвижный объект. Угломерные радиомаяки формируют линии положения во всех направлениях (всенаправленные РМ), либо в определенном секторе (секторные радиомаяки). Иногда радиомаяк служит для задания лишь одного (основного) направления, и на выходе приемоиндикатора в этом случае вырабатывается сигнал, указывающий отклонение от основного направления. По назначению применяемые в воздушной радионавигации радимаяки и радиопеленгаторы можно разделить на маркерные, курсовые, глиссадные и приводные. Всенаправленные и секторные радиомаяки используются для обеспечения воздушного движения в зонах аэродромов и на воздушных трассах. Однонаправленные РМ нашли широкое применение в радиотехнических системах посадки самолетов для указания траектории, по которой должен двигаться самолет при заходе на посадку. Фазовый метод
Рассмотрим радиопеленгование объекта фазовым методом в горизонтальной плоскости при использовании двух идентичных ненаправленных антенн А1 и А2 (рис.5.2), разнесенных на расстояние d . Если принять за начало отсчета фаз сигналов центр базы антенной системы, то разность фаз этих сигналов при неподвижных антеннах Δ φ = 2 π dsinΘ / λ . При вращении одной из них вокруг неподвижной второй с угловой скоростью Ω разность фаз
Δ φ = 2 π dcos ( Ω t – Θ )/ λ . (5.10)
Если подавать сравниваемые сигналы с выхода приемника на фазометр, чувствительным элементом которого является фазовый детектор, то напряжение на его выходе
U ф.д = k ф.д Um 2 cos ( 2 π d sinΘ / λ ), (5.11 ) где U т – амплитуда сигнала на входе детектора; k ф.д – масштабный коэффициент преобразования сигналов фазовым детектором. Поскольку изменение амплитуды принимаемых сигналов неизвестно, то для получения достоверной информации об угле прихода сигнала его амплитуду ограничивают, либо применяют эффективную АРУ. Кроме того, со sΔ φ – функция четная, а поэтому знак напряжения на выходе фазового детектора не зависит от стороны отклонения антенной системы от направления на объект. Для ликвидации этого недостатка в один из приемных каналов вводят фазосдвигающую цепь на 90°. В связи с указанными дополнительными преобразованиями сигналов соотношение (5.11) примет вид
U ф.д = U 0 sin ( 2 π d sinΘ / λ ), (5.12)
где U 0 – нормированная амплитуда. При малых значениях углов Θ зависимость U ф.д ( Θ ) имеет приближенно линейный характер: U ф.д ≈ U 0 2 π d / λ , (5.13)
и при изменении стороны отклонения меняет знак (полярность). Зависимость относительного значения напряжения рассогласования U ф.д / U 0 от угла Θ (угла рассогласования относительно равносигнального направления) носит название пеленгационной характеристики угломерной системы
F п ( Θ ) = U ф.д / U 0 = 2 π d Θ / λ , (5.14)
Производная от F п ( Θ ) при Θ → 0 называется крутизной пеленгационной характеристики или чувствительностью пеленгования:
Чем больше крутизна пеленгационной характеристики, тем меньше угол нечувствительности σ θ (средняя квадратическая погрешность) при заданном уровне шума σ ш (нормированного относительно сигнала U 0 ), тем выше пеленгационная чувствительность системы. Переходя от соотношения (5.13) к оценке взаимосвязи линейного приращения сигнала и измеряемого пеленга и усредняя полученные результаты, найдем среднюю квадратичную погрешность пеленгования
σ θ =1/ S θ Q , (5.16)
где Q = U 0 / U ш – отношение сигнал/шум по напряжению на входе фазометра. Полученное соотношение приближенное, так как справедливо при условии, что фазовый детектор не ухудшает соотношения сигнал/помеха в полосе выходного фильтра нижних частот, а коэффициент передачи k ф.д одинаков как для сигнала, так и для помехи. Таким образом, из формул (5.13)...(5.16) можно сделать вывод, что чувствительность и точность пеленгования растут с увеличением отношения d /λ . Однако с ростом размера d базы, как было показано в формуле (5.8), возникает многозначность отсчета пеленга. Для ее ликвидации и обеспечения высокой точности пеленгования используется многошкальный метод построения систем, т.е. антенная система с несколькими базами. При этом малая база образует грубую шкалу с однозначным отсчетом угла, а большая база – точную шкалу, но с неоднозначным отсчетом. Если точность отсчета по второй шкале недостаточна, добавляют еще одну антенну с еще большей базой и т. д. Очевидно, что подобная многошкальная система (в принципе не отличающаяся от многошкального измерения дальности) дает правильный отсчет лишь при условии, что удвоенная максимальная погрешность измерения фазы по грубой шкале не превышает интервала однозначности 2π точной шкалы. Хотя рассмотренный, многошкальный фазовый метод пеленгации и обладает весьма высокой точностью, однако он не обеспечивает угловое разрешение, так как несколько объектов, расположенных на различных направлениях, создадут в антеннах результирующий сигнал, соответствующий некоторому усредненному (ложному) направлению. Для раздельного измерения пеленгов объектов следует использовать антенны с достаточно узкими амплитудными характеристиками направленности. В фазовых пеленгационных системах, использующих импульсные сигналы, их сравнение и обработка выполняются за время приема каждого импульса, ввиду чего подобные пеленгаторы (также и амплитудные) получили название моноимпульсных. Особенностью моноимпульсных (многоканальных) пеленгаторов, использующих параллельное сравнение фаз (амплитуд) сигналов (полученных с помощью независимых каналов), является высокая помехозащищенность и, следовательно, перспективность использования для радиопеленгации.
Амплитудный метод Амплитудные методы радиоуглометрии основаны на использовании зависимости амплитуды или параметров амплитудной модуляции радиосигналов от навигационных параметров. При этом зависимость амплитуды радиосигнала от направления создается за счет диаграммы направленности антенной системы. В амплитудной углометрии наиболее распространенными для задания и определения направлений в пространстве являются методы минимума, максимума и сравнения амплитуд, который также называют равносигнальным. При этом напряжения отдельных антенн разнесенной антенной системы комбинируются так, чтобы амплитуда, либо глубина амплитудной модуляции результирующего сигнала (до подачи на вход приемника) была функцией пеленга.
Метод минимума Рассмотрим амплитудную пеленгацию по минимуму принимаемых сигналов на примере разнесенной антенной системы (рис. 5.3, а, б), состоящей из двух ненаправленных вертикальных вибраторов Α 1 и Α 2 , включенных противофазно.
Фаза разностной ЭДС не зависит от пеленга Θ , а ее амплитуда Emr
Emr =2 Emh 1 sin ( π dλ -1 sinΘ ), (5.17)
где Em – амплитуда напряженности поля в центре антенной системы, h 1 –действующая высота вибратора, является периодической функцией пеленга. Часто отсчет пеленга выполняют относительно плоскости антенны – ее базы, и тогда (5.17) примет вид
Emr =2 Emh 1 sin ( π dλ -1 cosΘ ), (5.18)
При малом разносе антенн по сравнению с длиной волны ( d / = λ «1 ) получим
Emr = Emh д cosΘ , (5.19)
где h д =2π dh 1 /λ – действующая высота антенной системы, состоящей из двух вибраторов. Выражения (5.17)...(5.19) определяют характер ДН антенной системы в горизонтальной плоскости, т.е. зависимость амплитуды разностного сигнала от пеленга Θ . Анализируя, в частности, соотношение (5.19), можно сделать следующие выводы: диаграмма направленности антенной системы из двух разнесенных вертикальных вибраторов (включенных противофазно) при приеме нормально поляризованной волны имеет вид косинусоиды, которая в полярных координатах изображается в виде «восьмерки», ориентированной в горизонтальной плоскости (рис. 5.3, г). При Θ = 90 и 270° приема (или излучения) нет, максимумы ДН соответствуют 0 и 180°; фаза ЭДС, наводимой в антенной системе пеленгуемой радиостанцией, изменяется на 180° при переходе через минимальное значение, теоретически равное нулю. Указанные свойства ДН рассмотренной системы используются для определения пеленга на излучатель по минимуму амплитуды разностного сигнала, фиксируемого при повороте антенной системы. Для определения стороны отклонения излучателя от направления нулевого приема (т.е. ликвидации двузначности оценки радиопеленга) используется противофазность измеряемых сигналов при переходе их амплитуды через минимальное значение. По мере увеличения относительного размера базы антенной системы ее ДН постепенно теряет форму «восьмерки» (рис.5.3, г), а при значениях d / λ ≥ 1 становится многолепестковой, что приводит к многозначности отсчета пеленга, хотя при этом и повышается крутизна ДН в направлении минимума приема. Из рассмотрения формы косинусоидальной ДН очевидно, что пеленгование по максимуму амплитуды разностного сигнала значительно менее точно (чем по минимуму), так как крутизна характеристики направленного излучения в районе ее максимума мала. При больших размерах антенны можно получить остронаправленные многолепестковые диаграммы, но при этом пеленгование по максимуму разностного сигнала дает многозначный пеленг. Поэтому метод пеленгации по минимуму амплитуды сигналов предполагает обычно использование минимума разностного сигнала. Для повышения точности и угловой чувствительности пеленгации с использованием метода минимума необходимо повышать крутизну ДН в направлении минимума приема сигналов. Крутизна ДН зависит от относительного размера базы антенны d / λ , увеличение которого ограничивается появлением неоднозначности отсчета пеленга из-за многолепесткового характера ДН. Таким образом, оценивая достоинства метода радиопеленгации по минимуму излучаемых (принимаемых) сигналов, можно указать его высокую точность и угловую чувствительность при относительно небольших размерах базы радиопеленгационных антенн. Кроме того, можно определить стороны отклонения пеленга от минимума ДН (за счет противофазности сигналов при переходе через минимум приема), что очень важно для осуществления автоматизации процесса радиопеленгования. Недостаток метода – отсутствие сигнала на входе приемника угломерной системы в момент отсчета пеленга, что снижает достоверность измерений и исключает возможность передачи по радиоканалу системы дополнительной информации. Поэтому, кроме пеленгационной направленной антенны, подобные угломерные системы всегда используют дополнительную ненаправленную антенну, на выходе которой формируется сигнал постоянной интенсивности. Метод максимума Метод основан на определении максимального значения амплитуды результирующего сигнала на выходе антенной системы. Поэтому сигналы разнесенной пары вертикальных вибраторов следует просуммировать, т.е. включить их синфазно (рис. 5.4, а). При пеленговании нормально поляризованной волны на выходе подобной антенной системы получим суммарный сигнал, амплитуда которого (см. рис.5.4, б):
EmΣ = 2Em cos(π dλ -1sinΘ ), (5.20)
где φ =
Полученная зависимость амплитуды выходного сигнала антенны от угла Θ изображена в полярных координатах на рис.5.4, в, из которого видно, что в принципе эта зависимость может быть использована для пеленгации объектов по максимуму сигнала, соответствующего значению Θ = 0. При этом методика оценки пеленга заключается в повороте ДН и анализе огибающей принимаемого сигнала, в результате чего фиксируются максимум его амплитуды и соответствующее ему направление на объект. Однако угловая чувствительность и точность пеленгации при использовании зависимости (5.20) будут низкими, так как при малых Θ эта зависимость имеет квадратический характер, а крутизна ДН в области максимума мала и не зависит от соотношения d / λ (хотя и здесь будет наблюдаться многозначность отсчета сигнала при увеличении d / λ ). Поэтому рассмотренная простейшая двухвибраторная система для пеленгации по методу максимума не используется. Указанные недостатки устраняются при использовании более сложных многовибраторных антенн (рис.5.5) и антенн со сплошным раскрывом, которые позволяют сформировать остронаправленную ДН за счет больших размеров базы и обеспечить при этом однозначность пеленгования, высокую точность и разрешающую способность измерения угловых координат. Таким образом, основными достоинствами метода пеленгации по максимуму амплитуды сигнала являются высокая помехоустойчивость и точность измерений, что достигается в отличие от метода минимума при больших значениях относительных размеров баз антенных устройств. Поэтому радиопеленгационные системы, основанные на этом методе, обычно работают в метровом диапазоне волн, в котором можно создать весьма остронаправленную ДН. Принципиальным недостатком метода максимума является то, что изменения амплитуды сигнала на выходе антенных устройств не связаны со стороной отклонения ДН от направления на пеленгуемую радиостанцию, что затрудняет автоматизацию процессов измерения индикации угловых координат.
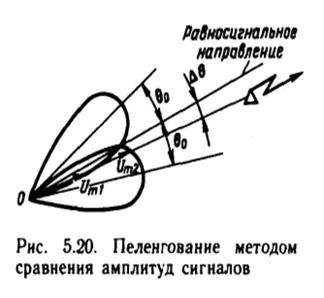
5.3.3. Метод сравнения (равносигнальный метод) Пеленгация методом сравнения амплитуд сигналов, принимаемых (излучаемых) отдельными антеннами, основана на вычитании сигналов, соответствующих двум ДН, максимумы которых симметрично смещены относительно равносигнального направления на угол Θ 0 (рис. 5.6).
При смещении пеленгуемого объекта относительно равносигнального направления амплитуда разностного сигнала на выходе приемника пеленгатора (после узкополосной фильтрации) определяется выражением
Ur ( Θ ) = U с .тах [ F ( Θ 0 + Δ Θ ) – F ( Θ 0 – Δ Θ )]. (5.21)
Эта зависимость линейна при малых углах Δ Θ , равна нулю на равносигнальном направлении и меняет свой знак при изменении стороны отклонения (± Δ Θ ) пеленга от равносигнального направления. Выбирая угол смещения диаграмм Θ 0 из условий обеспечения высокой крутизны ДН в зоне их пересечения, можно получить высокую точность пеленгования. Хотя по разностному сигналу Ur ( Θ ) достаточно точно фиксируется равносигнальное направление, однако определить отклонение от этого направления еще нельзя, так как U с .тах - неизвестная величина. Поэтому в системах пеленгации, реализующих рассматриваемый метод, используют обычно нормирование сигналов путем образования отношения разностного сигнала Ur ( Θ ) к суммарному UΣ ( Θ )
которое может быть принято в качестве пеленгационной характеристики F п ( Θ ) при выполнении условий фазирования. Операция деления разностного сигнала на суммарный выполняется в приемном устройстве в результате изменения с помощью АРУ коэффициента усиления (обратно пропорционально амплитуде суммарного сигнала). Точность пеленгования при использовании метода сравнения можно оценить, используя выражение
где σ F п - средняя квадратическая погрешность, возникающая из-за флюктуаций пеленгационной характеристики; Из (5.23) следует, что точность пеленгования возрастает с увеличением крутизны пересекающихся ДН в равносигнальном направлении. Этого можно достичь выбором угла Q0 смещения ДН относительно равносигнального направления. |
|||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2020-02-16; Просмотров: 125; Нарушение авторского права страницы

 . (7.5)
. (7.5) , (7.6)
, (7.6) и опорный сигнал
и опорный сигнал  , разность фаз которых равна азимуту ЛА Θ 0. Эта разность фаз измеряется фазометром ФМ, в котором в качестве чувствительного элемента используется фазовый детектор. Напряжение на выходе ФД
, разность фаз которых равна азимуту ЛА Θ 0. Эта разность фаз измеряется фазометром ФМ, в котором в качестве чувствительного элемента используется фазовый детектор. Напряжение на выходе ФД
 . (5.15)
. (5.15) sin Θ – разность фаз между ЭДС разнесенных антенн.
sin Θ – разность фаз между ЭДС разнесенных антенн.
 , (5.22)
, (5.22) , (5.23)
, (5.23) - крутизна пеленгационной характеристики.
- крутизна пеленгационной характеристики.