|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
РАЗРАБОТКА АЛГОРИТМИЧЕСКОЙ СТРУКТУРЫ
Алгоритм работы прибора приведен ниже. Алгоритм разработан на основе определенных выше требованиях к измеряемым данным, а также на основе разработанной в п.4 технической структуры. Работа системы организована по прерываниям от датчика скорости, датчика частоты, а также системных часов (прерывание с интервалом 1 сек от таймера). При измерении скорости производится подсчет числа импульсов v за 1 период измерения и индикации (1 сек). Измеренное значение нормируется к единицам измерения [км/ч] с помощью преобразования V=v*200/333. Импульсы датчика скорости также используются для подсчета расстояния. Так как зависимость числа импульсов (~6004 имп./км) для разных автомобилей может отличаться, то вводится изменяемый пользователем коэффициент K2, равный числу импульсов датчика на 100 м расстояния. Увеличение значения S производится каждые 100 м. На индикацию выдается значение S/10 [км]. При измерении частоты вращения коленчатого вала N, производится измерение длительности периода импульсов датчика частоты T1 в квантах времени 2 мкс. Для повышения достоверности считывания информации и защиты от импульсных помех производится последовательное считывание и сравнение длительностей двух соседних периодов. При несовпадении, принимается, что одно из двух значений - ошибочно, поэтому цикл измерения повторяется. Так как вероятность появления двух подряд ложных значений мала, то такой алгоритм позволяет получить достаточную надежность считывания данных. В качестве измеренного значения принимается среднее арифметическое 2-х соседних измерений. Значение периода Т преобразуется в число оборотов с помощью преобразования N=K1× 5× 105/T, где коэффициент K1=60/Nцил, то есть данный тахометр может использоваться в автомобилях с разным числом цилиндров (или разными системами зажигания, так как точнее будет сказать, что Nцил - число импульсов зажигания на 1 оборот вала двигателя). Измерение напряжения бортовой сети автомобиля производится по алгоритму для интегрирующего АЦП. Сначала производится сброс интегратора, затем запуск АЦП и счет квантов времени. Так как значению напряжения 16В соответствует 512 квантов, то после измерения времени интегрирования T2 значение напряжения с точностью 0, 1 В вычисляется по формуле U=10× T2/32 [100 мВ]. На индикацию выдается величина U/10 [В]. Все измеренные значения, а также информация о текущих режимах работы сохраняется в энергонезависимой памяти. При значении измеренной частоты вращения вала двигателя меньшей 100 об/мин тахометр переходит в режим ожидания, то есть считается, что двигатель остановлен.
Рис.3.1.1. Алгоритм работы прибора
Рис.3.1.2. Алгоритм работы прибора (продолжение)
Рис.3.2. Алгоритм обработки прерывания от датчика скорости ОПРЕДЕЛЕНИЕ ТЕХНИЧЕСКОЙ СТРУКТУРЫ ПРИБОРА Выбор датчиков
4.1.1 Датчик частоты вращения вала двигателя Для получения импульсов, соответствующих оборотам коленчатого вала двигателя (измерительные импульсы тахометра), используем импульсы первичной обмотки системы зажигания. При этом датчик частоты вращения коленчатого вала представляет собой формирователь импульсов, которые поступают на вход (прерывания) контроллера. Данный датчик представляет из себя дифференцирующую цепь и ограничитель напряжения импульсов. При измерении периода следования импульсов, число оборотов в минуту коленчатого вала определяется выражением
где Nизм. - измеренное число квантов времени; цил.- число цилиндров в двигателе автомобиля; Dt- величина кванта времени [сек]. При Dt=2 мкс, частота определяется по формуле
4.1.2 Датчик скорости Для определения скорости используем стандартный датчик скорости (тип 2112-384301, 301.3843), в связи с тем, входит в состав оборудования автомобиля (или легко в него встраивается). Датчик выдает около 6004 импульса на каждый километр пройденного расстояния. Используем частотный способ измерения скорости (рис.4.1).
Рис.4.1.
При этом скорость вычисляется по формуле:
V=n/Tизм, (4.3)
где Тизм- время измерения, сек; n- число измеренных импульсов. На рис.4.2 показан выходной сигнал датчика угловой скорости колеса при высокой (сплошная линия) и низкой (прерывистая линия) скорости.
Рис. 4.2. Выходной сигнал датчика скорости
Выбранный датчик соответствует следующим характеристикам:
4.1.3 Датчик напряжения Датчик напряжения представляет собой АЦП, на вход которого подается напряжение, пропорциональное напряжению бортовой сети автомобиля.
Uin=k× U, (4.4)
где 0< k< 1 - коэффициент входного делителя напряжения; U=7, 0…16, 0 В - измеряемое напряжение. Необходимость введения делителя заключается в том, что максимальное измеряемое напряжение U выше напряжения питания АЦП. Так как требования к времени преобразования не велики (измерение постоянного напряжения), а повышенные требования к минимизации аппаратных затрат системы, то применим программно-аппаратный АЦП. Алгоритм работы АЦП состоит в следующем. Сигнал LV подается на вход операционного усилителя, включенного в качестве интегратора. В результате этого на выходе получается ГЛИН, возрастающий до уровня переключения компаратора. В случае достижения равного значения, подается сигнал, по которому и происходит фиксирование момента уравнивания сигналов. В этой цепи ставят резистор и стабилитрон для предохранения от пробоя. Функциональная схема АЦП приведена на рис.4.3. На схеме изображены сигналы: EOC - конец цикла преобразования (к контроллеру); RES - сброс интегратора; LV- запуск цикла преобразования. Рассчитаем параметры АЦП следующим образом. Погрешность измерения по напряжению требуется DU=±0, 1В. Число разрядов АЦП определится по следующей формуле:
Рис.4.3. Функциональная схема АЦП датчика напряжения
АЦП девятиразрядный (то есть 512 квантов). Операционный усилитель используем с диапазоном выходных напряжений 0..5 В. Пусть 1 квант равен 10 мкс, для более удобного измерения будем считать, что уровень 5В достигается за 5120 мкс (512*10=5120). Тогда параметры интегратора вычисляются, исходя из формулы:
Uвых = Uвх× t/R1× C. (4.6)
Подставляя имеющиеся данные, зададимся сопротивлением и вычислим емкость. Зная, что входное напряжение равно 2.5В, а R1=10 кОм, получим: С = 2.5 * 5120 / 1500 Исходя из полученных данных, определим время, необходимое для сброса (разряжения емкости). Учтем, что R - сопротивление открытого канала ключа VT равно около 100 Ом. Тогда время сброса равно сбр=10000× 3× /109 = 3 мкс. Возьмем время сброса с запасом - 5 мкс, тогда полный период преобразования будет длиться 5120 + 5 = 5125 мкс.
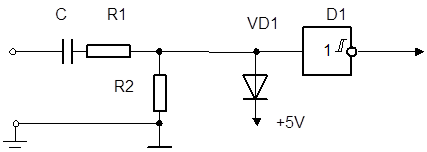
4.1.4 Сопряжение датчиков с контроллером Сигнал с датчика частоты вращения коленчатого вала поступает в виде положительных импульсов напряжения, амплитудой до 600 В с первичной обмотки катушки зажигания. Данные импульсы должны поступать на вход прерывания микроконтроллера, поэтому требуется их преобразование к напряжению логических уровней. Также необходимо учесть, что прерывание происходит по отрицательному фронту импульса. Функциональная схема устройства сопряжения сигналов датчика частоты с контроллером приведена на рис.4.4.
Рис.4.4. УСО датчика частоты
Конденсатор С и сопротивление R1, R2 образуют дифференцирующую цепочку, которая служит для задержки НЧ составляющих сигнала и постоянной составляющей. Сопротивления R1 и R2 образуют делитель напряжения для ограничения входного сигнала. Диод VD1 стабилизирует амплитуду импульсов на уровне +5В. Элемент D1 выполняет роль 1-разрядного АЦП, то есть компаратора. Сформированный таким образом цифровой сигнал поступает на вход прерывания контроллера. Блок сопряжения с датчиком скорости выполнен по аналогичной схеме, за исключением того, что так как выходная амплитуда датчика скорости 10 В, то требуется другое соотношение сопротивлений делителя напряжения R1 и R2. УСО для датчика напряжения представляет собой (рис.4.5.) делитель напряжения для приведения значения напряжения к уровню +5 В и ФНЧ для подавления помех и переменной составляющей с частотой среза порядка 10 Гц.
Рис.4.5. УСО датчика напряжения
Делитель напряжения образован сопротивлениями R1, R2. ФНЧ состоит из конденсатора C и сопротивления R1. Стабилитрон VD1 и диод VD2 служат для защиты входа АЦП от перенапряжения.
|
Последнее изменение этой страницы: 2020-02-16; Просмотров: 133; Нарушение авторского права страницы



 [об/мин], (4.1)
[об/мин], (4.1) [об/мин]. (4.2)
[об/мин]. (4.2)

 9 (4.5)
9 (4.5)
 » 85 нФ
» 85 нФ